







navigation 官方介绍:cn/navigation - ROS Wiki
move_base 官方介绍:http://wiki.ros.org/move_base
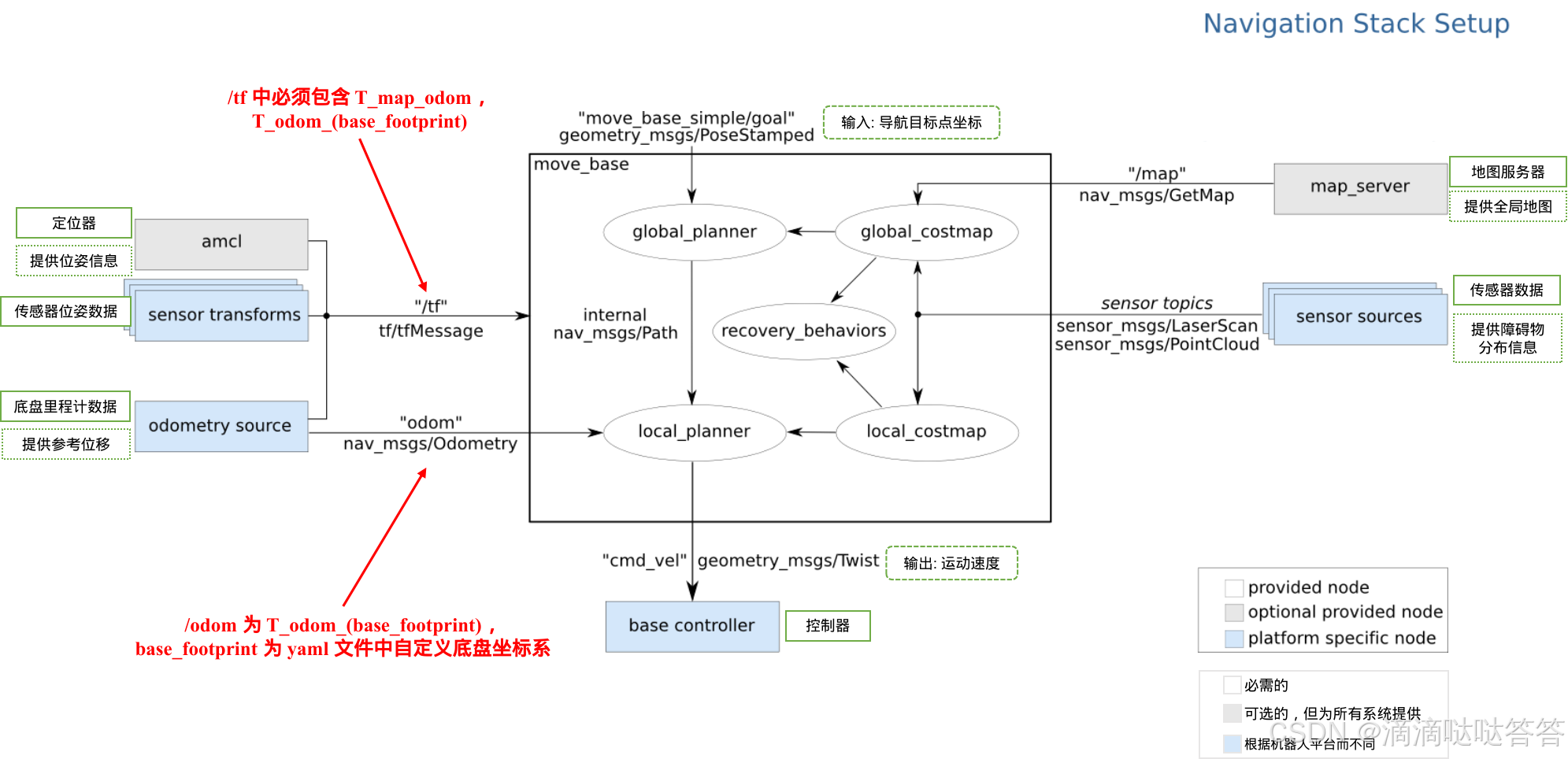
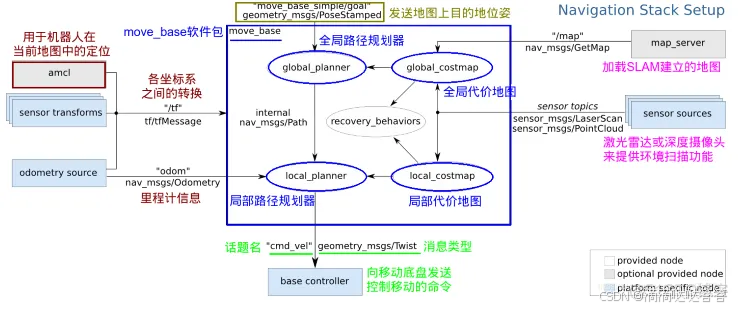
move_base 必须订阅 3 个话题:
- /map:map_server 发送的全局栅格地图
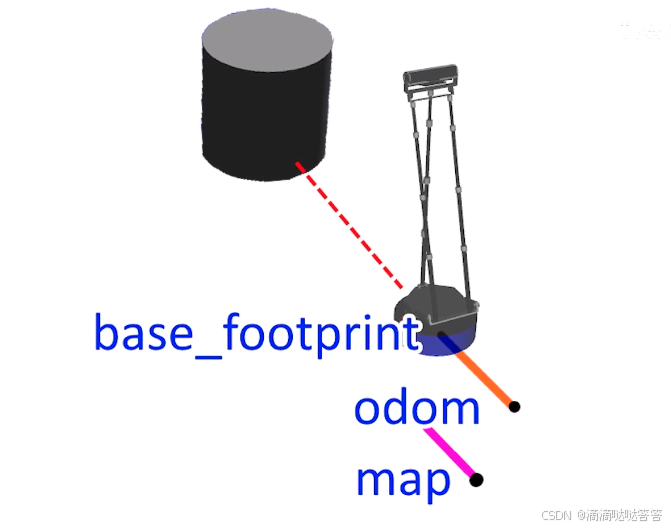
- /tf :且 /tf 中必须包含 T_map_odom, T_odom_(base_footprint)
- /odom:/odom 为 T_odom_(base_footprint), base_footprint 为 yaml 文件中自定义底盘坐标系
- /sensor_topics 可选:在 yaml 文件的 observation_sources 参数中定义,用于生成局部代价地图。如果不订阅任何话题,则局部代价地图会和全局代价地图的子地图保持一致,不会检测到临时障碍物。
如果在仿真环境下, sensor source、odometry source 和 sensor transforms 都已提供好,我们只需要完成以下部分:
一、编写导航程序

①创建 ROS 工作空间 和 pkg 包
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_create_pkg nav_pkg roscpp rospy move_base_msgs actionlib②在 pkg 中创建 nav.launch 文件,其中包含了上面介绍的3个节点。
<launch>
<!--- Run move_base -->
<node pkg="move_base" type="move_base" name="move_base">
<!-- 代价地图参数 -->
<!-- 通过 命名空间 ns 实现了用一个文件给全局和局部两个代价地图设置一样的参数,参数是关于代价地图的形状的 -->
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<!-- 代价地图的计算范围和频率 -->
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<!-- 设置 move_base 的全局路径规划器为 global_planner 规划器 -->
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<!-- 使用 GlobalPlanner规划器 中的 A*算法 -->
<param name="GlobalPlanner/use_dijkstra" value="false" />
<param name="GlobalPlanner/use_grid_path" value="true" />
<!-- 设置 move_base 的局部路径规划器为 wpbh_local_planner 规划器-->
<!-- <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" /> -->
<!-- 设置 move_base 的局部路径规划器为 DWA 规划器 -->
<!-- <param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/dwa_local_planner_params.yaml" command="load" /> -->
<!-- 设置 move_base 的局部路径规划器为 TEB 规划器 -->
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/teb_local_planner_params.yaml" command="load" />
<!-- 设置控制器的控制频率为 10 Hz -->
<param name="controller_frequency" value="10" type="double" />
</node>
<!-- Run map server -->
<!-- 全局静态地图,发布话题为 /map -->
<node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/map.yaml"/>
<!--- Run AMCL -->
<node pkg="amcl" type="amcl" name="amcl"/>
<!--- Run rviz -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find nav_pkg)/rviz/nav.rviz"/>
<!-- 航点导航插件 -->
<!-- <node pkg="waterplus_map_tools" type="wp_navi_server" name="wp_navi_server" output="screen" />
<node pkg="waterplus_map_tools" type="wp_manager" name="wp_manager" output="screen" /> -->
</launch>
③编译工作空间
二、 运行导航程序
①运行仿真环境
roslaunch wpr_simulation wpb_stage_robocup.launch②运行 nav.launch 文件
roslaunch nav_pkg nav.launch③打开 rviz
④添加 Map(话题: /map);Path(话题:/move_base/GlobalPlanner/plan)
其中运行 nav.launch 文件产生的话题如下:
1、map_server 产生的话题
/map
- 说明:发布静态地图数据,通常为
nav_msgs/OccupancyGrid类型。 - 来源:由
map_server节点生成,用于全局路径规划。
/map_metadata
- 说明:发布地图的元数据信息,如地图的分辨率、宽度、高度和原点位置。通常为 nav_msgs/MapMetaData 类型
- 来源:由
map_server节点生成,辅助其他节点理解地图的结构和坐标系

/map_updates
- 说明:描述了一个增量更新的地图,即只传递改变的部分(例如,新障碍物或移除的障碍物)。通常为 map_msgs/OccupancyGridUpdate 类型
- 来源:由
map_server节点生成
2、amcl 产生的话题
/amcl_pose
- 说明:发布
amcl计算出的机器人在地图中的位姿,通常为geometry_msgs/PoseWithCovarianceStamped类型。 - 来源:由
amcl节点生成,用于定位和导航。

/initialpose
- 说明:用于设置机器人的初始位姿,通常通过
rviz手动发布该话题。通常为 geometry_msgs/PoseWithCovarianceStamped 类型 - 来源:由用户或
rviz发布,用于amcl节点初始化机器人位置。
/diagnostics
- 说明:发布系统诊断信息,包括节点状态、传感器健康状况等,通常为
diagnostic_msgs/DiagnosticArray类型。 - 来源:由
amcl节点生成,用于监控和调试系统状态

/particlecloud
- 说明:发布粒子滤波器的粒子分布,可以在 rviz 中可视化。通常为
geometry_msgs/PoseArray类型。 - 来源:由
amcl节点生成,用于可视化粒子滤波器的状态。

/amcl/parameter_descriptions 和 /amcl/parameter_updates
- 说明:用于动态参数调整(dynamic reconfigure),允许在运行时修改
amcl的参数。前者通常为 dynamic_reconfigure/ConfigDescription 类型;后者为 dynamic_reconfigure/Config 类型。 - 来源:由
amcl节点生成,支持参数的动态管理。
3、move_base 产生的话题
3.1 move_base 的总体控制和状态
/move_base/current_goal
- 说明:发布当前的导航目标,通常为
geometry_msgs/PoseStamped类型。 - 来源:由
move_base节点生成,表示当前正在执行的目标。
/move_base/goal 和 /move_base_simple/goal
- 说明:
/move_base/goal:用于接收复杂的导航目标,通常为move_base_msgs/MoveBaseActionGoal类型。/move_base_simple/goal:用于接收简化的导航目标,通常通过rviz发布,类型为geometry_msgs/PoseStamped。与/move_base/goal相比,没有连续反馈,无法追踪机器人执行状态)
- 来源:由用户通过
rviz或其他工具发布,用于设置导航目标。
/move_base/recovery_status
- 说明:发布导航恢复行为的状态信息,如避障操作的执行情况。通常为 move_base_msgs/RecoveryStatus 类型。
- 来源:由
move_base节点生成,用于监控恢复行为。
/move_base/cancel
- 说明:用于取消当前的导航目标,通常为
actionlib_msgs/GoalID类型。 - 来源:由用户或其他节点发布,用于终止当前导航任务。
/move_base/feedback
- 说明:发布导航过程中的实时反馈信息,包含机器人底盘坐标。通常为
move_base_msgs/MoveBaseActionFeedback类型。 - 来源:由
move_base节点生成,用于监控导航进展。
/move_base/result 和 /move_base/status
- 说明:
/move_base/result:发布导航结果,通常为move_base_msgs/MoveBaseActionResult类型。/move_base/status:发布当前导航的状态,通常为actionlib_msgs/GoalStatusArray类型。
- 来源:由
move_base节点生成,用于反馈导航任务的完成情况和状态。
/move_base/parameter_descriptions 和 /move_base/parameter_updates
- 说明:用于动态调整
move_base节点的整体参数。 - 来源:由
move_base节点生成,支持参数的动态管理。
3.2全局规划器(Global Planner)
/move_base/GlobalPlanner/parameter_descriptions 和 /move_base/GlobalPlanner/parameter_updates
- 说明:用于动态调整全局规划器的参数。
- 来源:由
move_base的全局规划器(如GlobalPlanner)生成,支持参数的动态管理。前者通常为 dynamic_reconfigure/ConfigDescription 类型;后者为 dynamic_reconfigure/Config 类型。
/move_base/GlobalPlanner/plan
- 说明:发布全局规划路径的坐标点,通常为
nav_msgs/Path类型。 - 来源:由
GlobalPlanner生成,用于展示全局路径。
/move_base/GlobalPlanner/potential
- 说明:发布潜在场(potential field)地图,用于全局路径规划的成本计算。通常为 nav_msgs/OccupancyGrid 类型。
- 来源:由
GlobalPlanner生成,辅助路径规划。
3.3局部规划器(Local Planner)
3.3.1 DWA 局部规划器
3.3.2 TEB局部规划器
/move_base/TebLocalPlannerROS/teb_markers
- 说明:可视化 TEB 局部路径规划器的规划结果,用于在 RViz 中显示路径规划器生成的路径、障碍物、速度矢量等信息。通常为
visualization_msgs/Marker类型。
teb_markers 发布的不同命名空间的标记内容:
① PointObstacles 和 PolyObstacles 命名空间:用于可视化当前路径规划中被优化考虑的所有点状和多边形障碍物。
② TebContainer 命名空间:用于显示找到的所有路径及其在不同拓扑结构中的优化结果(仅在启用并行规划时)。
- 来源:由 TebLocalPlannerROS 生成,使开发人员可以清晰地看到路径、障碍物和优化后的轨迹。对于调整路径规划参数、理解算法行为和调试复杂环境中的局部路径规划器很有帮助。
3.3.3 WpbhLocalPlanner 局部规划器
/move_base/WpbhLocalPlanner/local_planner_target
- 说明:发布局部规划的目标点,通常为
geometry_msgs/PoseStamped类型。 - 来源:由
WpbhLocalPlanner生成,用于局部路径调整。
3.4全局代价地图(Global Costmap)
/move_base/global_costmap/costmap 和 /move_base/global_costmap/costmap_updates
- 说明:发布全局代价地图及其更新数据,通常为
nav_msgs/OccupancyGrid和map_msgs/OccupancyGridUpdate类型。 - 来源:由
move_base的全局代价地图生成,辅助全局路径规划。
/move_base/global_costmap/footprint
- 说明:发布机器人轮廓信息,通常为
geometry_msgs/PolygonStamped类型。 - 来源:由
move_base全局代价地图生成,用于计算安全代价区域。
/move_base/global_costmap/inflation_layer/parameter_descriptions 和 /move_base/global_costmap/inflation_layer/parameter_updates
- 说明:用于膨胀层的动态调参,用于障碍物周围的安全缓冲区设置。
- 来源:由
move_base的膨胀层生成,增加障碍物周围的安全缓冲区。
/move_base/global_costmap/obstacle_layer/parameter_descriptions 和 /move_base/global_costmap/obstacle_layer/parameter_updates
- 说明:用于动态障碍物图层的动态调参。
- 来源:由
move_base的障碍物层生成,处理动态障碍物信息。
/move_base/global_costmap/static_layer/parameter_descriptions 和 /move_base/global_costmap/static_layer/parameter_updates
- 说明:用于静态图层的动态调参。
- 来源:由
move_base的静态层生成,处理静态障碍物和背景地图。
/move_base/global_costmap/parameter_descriptions 和 /move_base/global_costmap/parameter_updates
- 说明:用于调整全局代价地图的整体参数。
- 来源:由
move_base全局代价地图生成,支持参数的动态管理。
3.5局部代价地图(Local Costmap)
/move_base/local_costmap/costmap 和 /move_base/local_costmap/costmap_updates
- 说明:发布局部代价地图及其更新数据,通常为
nav_msgs/OccupancyGrid和map_msgs/OccupancyGridUpdate类型。 - 来源:由
move_base的局部代价地图生成,辅助局部路径规划。
/move_base/local_costmap/footprint
- 说明:发布机器人轮廓信息,通常为
geometry_msgs/PolygonStamped类型。 - 来源:由
move_base局部代价地图生成,用于计算安全代价区域。
/move_base/local_costmap/inflation_layer/parameter_descriptions 和 /move_base/local_costmap/inflation_layer/parameter_updates
- 说明:用于膨胀层的动态调参,用于障碍物周围的安全缓冲区设置。
- 来源:由
move_base的膨胀层生成,增加障碍物周围的安全缓冲区。
/move_base/local_costmap/obstacle_layer/parameter_descriptions 和 /move_base/local_costmap/obstacle_layer/parameter_updates
- 说明:用于动态障碍物图层的动态调参。
- 来源:由
move_base的障碍物层生成,处理动态障碍物信息。
/move_base/local_costmap/parameter_descriptions 和 /move_base/local_costmap/parameter_updates
- 说明:用于调整局部代价地图的整体参数。
- 来源:由
move_base局部代价地图生成,支持参数的动态管理。
三、move_bose 节点参数解析
<!--- Run move_base -->
<node pkg="move_base" type="move_base" name="move_base">
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
</node>
1、全局规划器 global_planner
官方介绍:global_planner - ROS Wiki
1.1 广度优先算法 BFS(Dijkstra算法)

1.2 深度优先算法 DFS(A*)

1.3 move_base 中的全局规划器

move_base 共有 3 个全局规划器,默认使用 Navfn规划器。其中前两个规划器中均包含 Dijkstra算法 和 A*算法,都默认使用 Dijkstra算法,但 Navfn规划器中的 A*算法存在 Bug。

若想使用 Global_planner规划器 中的 A*算法,需要加上如下代码:
<!-- 设置 move_base 的全局路径规划器为 global_planner 规划器 -->
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<!-- 使用 GlobalPlanner规划器 中的 A*算法 -->
<param name="GlobalPlanner/use_dijkstra" value="false" />
<param name="GlobalPlanner/use_grid_path" value="true" />Carrot_planner规划器:从起始点到目标点延伸一条路径,遇到障碍物就停止。代码简单,经常被用来作为自定义规划器的模版进行修改。

1.4 自定义规划器
move_base 支持自己编写自定义全局规划器,提供了一种 Plugin 插件接口,只要按照特定的格式,就能把自己的路径规划算法编写成新的规划器,加载到 move_base 节点中使用。


2、AMCL (Adaptive Mentcarto Localization)自适应蒙特卡罗定位算法
官方介绍:amcl - ROS Wiki
AMCL:使用粒子滤波在已知地图中进行重定位的算法。同时使用了 物理里程计输出的位姿 、 二维激光雷达数据和二维栅格地图匹配得到的位姿,具有较强的自我纠错功能。 AMCL 算法本质上是一种重定位算法,输出配准后的 T_map_odom,持续修正里程计的累计误差。rviz 中添加 PoseArray 订阅话题 /particlecloud 可查看 AMCL 产生的粒子。

AMCL参数:
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<!-- 机器人的运动模型为差动驱动模型,即机器人只能前后运动和原地旋转,无法侧向移动。 -->
<param name="odom_model_type" value="diff"/>
<!-- 机器人的运动模型为全向运动模型,允许机器人在平面上向任何方向移动。 -->
<param name="odom_model_type" value="omni"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<!-- 粒子滤波的粒子数 -->
<param name="min_particles" value="50"/>
<param name="max_particles" value="500"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
其中 AMCL 负责输出 map 到 odom 的 tf ;里程计负责输出 odom 到 base_frame 的 tf 。从而形成完整的 map 到 base_frame 的 tf。

注意:AMCL 切换本体和分身是在 map 到 odom 这段的 tf 上产生跳跃突变来实现的,所以在导航过程中会看到机器人位置跳变,这就是 AMCL 输出的这段 tf 突变产生的结果;而里程计输出的 odom 到 base_frame 这段 tf 通常是保持连续变化的,不会突然跳变(这个特征在生成代价地图时会用到)。
3、代价地图 costmap
<!-- 代价地图参数 -->
<!-- 通过 命名空间 ns 实现了用一个文件给全局和局部两个代价地图设置一样的参数,参数是关于代价地图的形状的 -->
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<!-- 代价地图的计算范围和频率 -->
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
3.1 代价地图的形状参数
参数模版:
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint
robot_radius: 0.12 #圆形
# footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状
# footprint_padding: 0.01 #设置机器人轮廓的额外填充距离,主要用于导航和避障
obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图
raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物
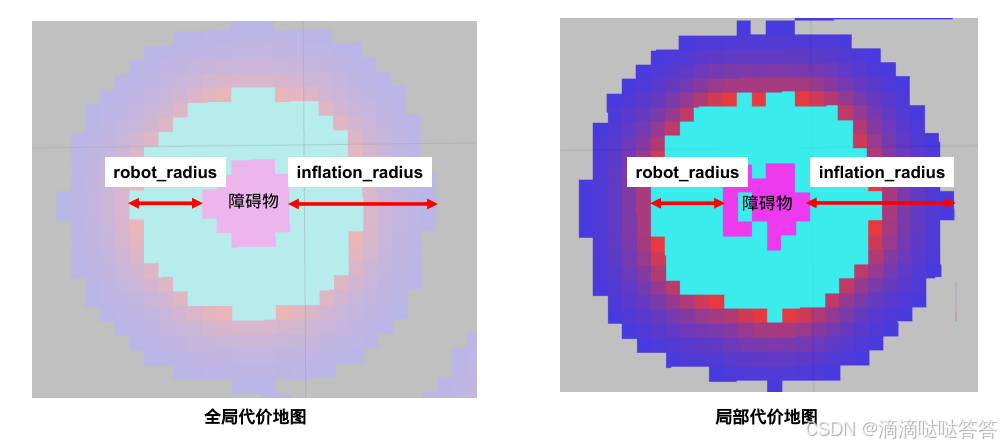
#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物
inflation_radius: 0.2
#代价比例系数,越大则代价值越小
cost_scaling_factor: 3.0
#地图类型
map_type: costmap
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
实际参数:
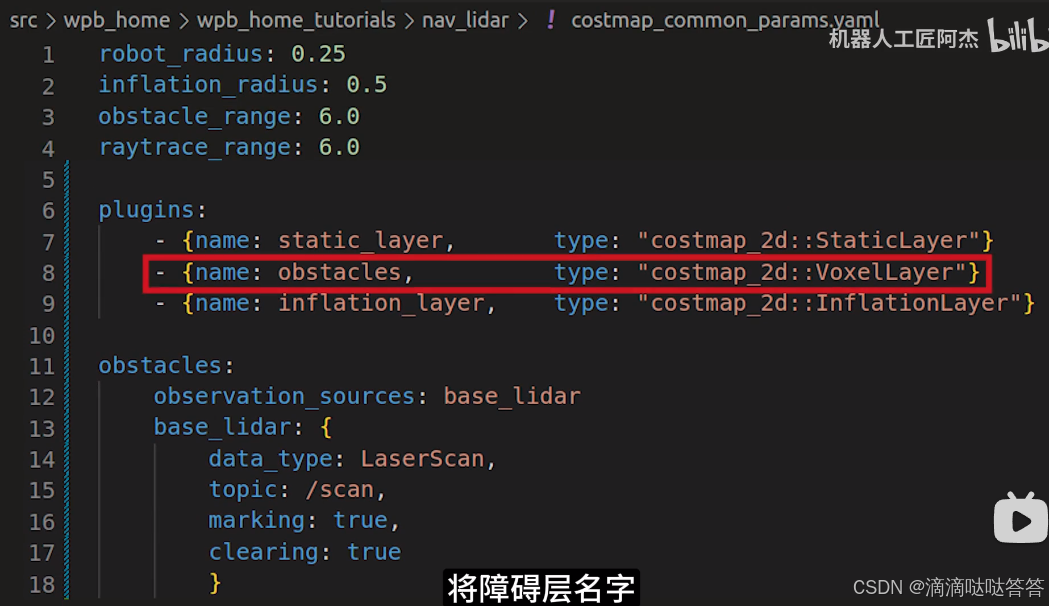
robot_radius: 0.25 # 机器人底盘半径
inflation_radius: 0.5 # 膨胀区域的半径
obstacle_range: 6.0 # 激光雷达障碍物检测距离,单位 m
raytrace_range: 6.0 # 清除动态障碍物的残留影子
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacles, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
static_layer:
use_maximum: true # 地图层与其他层合并时,选择最大值进行叠加。通常用于生成更为保守的代价地图
map_topic: /map # 将静态层使用来自外部的静态地图(如 /map 话题)构建代价地图
obstacles:
observation_sources: base_lidar # 障碍物的观测来源,与下文保持一致
# 观测来源的数据参数
base_lidar: {
sensor_frame: laser, # 传感器数据所在的坐标系
data_type: LaserScan, # 消息的类型
topic: /scan, # 话题名称
marking: true, # 是否将扫描到的障碍物添加到代价地图
clearing: true # 是否清除扫描范围内的障碍物残影
}
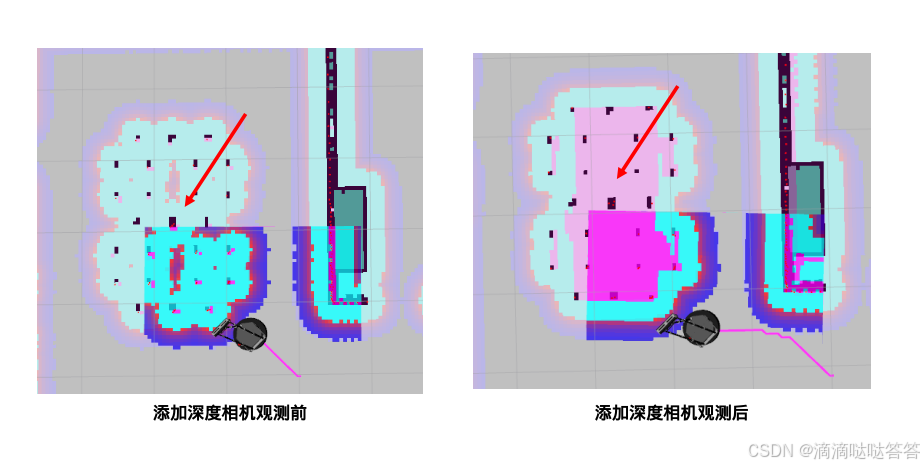
也可在 observation_sources 中添加深度相机和多线激光雷达作为额外观测,添加深度相机观测的示例如下:
robot_radius: 0.25 # 机器人底盘半径
inflation_radius: 0.5 # 膨胀区域的半径
obstacle_range: 6.0 # 激光雷达障碍物检测距离,单位 m
raytrace_range: 6.0 # 清除动态障碍物的残留影子
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacles, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
static_layer:
use_maximum: true # 地图层与其他层合并时,选择最大值进行叠加。通常用于生成更为保守的代价地图
map_topic: /map # 将静态层使用来自外部的静态地图(如 /map 话题)构建代价地图
obstacles:
observation_sources: base_lidar head_kinect2 # 障碍物的观测来源,与下文保持一致
# 观测来源的数据参数
base_lidar: {
sensor_frame: laser, # 传感器数据所在的坐标系
data_type: LaserScan, # 消息的类型
topic: /scan, # 话题名称
marking: true, # 是否将扫描到的障碍物添加到代价地图
clearing: true # 是否清除扫描范围内的障碍物残影
}
head_kinect2: {
sensor_frame: kinect2_ir_optical_frame,
data_type: PointCloud2,
topic: /kinect2/sd/points,
marking: true,
clearing: true,
max_obstacle_height: 1.5, # 障碍物的高度,单位 m
min_obstacle_height: 0.2
}可以看到,添加深度相机观测后,单线激光雷达检测不到的桌子也可以显示在代价地图中。
3.2 全局代价地图的计算范围和频率参数
参数模版:
global_costmap:
global_frame: map #地图坐标系
robot_base_frame: base_footprint #机器人坐标系
# 以此实现坐标变换
update_frequency: 1.0 #代价地图更新频率
publish_frequency: 1.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.
实际参数:
global_costmap:
global_frame: map # 地图坐标系名称
robot_base_frame: base_footprint # 底盘坐标系名称
static_map: false # 是否将 map_server 发来的地图数据作为初始代价地图
rolling_window: true # 滑动窗口,与 static_map 的值相反
update_frequency: 1.0 # 地图更新频率,单位 hz
publish_frequency: 1.0 # 地图发布频率,单位 hz
transform_tolerance: 1.0 # transform 延迟容忍值,单位 s。如出现 tf 的 timeout 错误,调大该值。其中 transform 指的是 传感器 到 map 的 tf ,包含 3 段

3.3 局部代价地图的计算范围和频率参数
参数模版:
local_costmap:
global_frame: odom #里程计坐标系
robot_base_frame: base_footprint #机器人坐标系
update_frequency: 10.0 #代价地图更新频率
publish_frequency: 10.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: false #不需要静态地图,可以提升导航效果
rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化
width: 3 # 局部地图宽度 单位是 m
height: 3 # 局部地图高度 单位是 m
resolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致
实际参数:
local_costmap:
global_frame: odom # 地图坐标系名称
robot_base_frame: base_footprint # 底盘坐标系名称
static_map: false # 是否将 map_server 发来的地图数据作为初始代价地图
rolling_window: true # 局部代价地图是否和底盘一起移动
width: 3.0 # 代价地图的宽度,单位 m
height: 3.0
update_frequency: 10.0 # 局部代价地图的更新频率,一般和激光雷达的扫描频率保持一致
publish_frequency: 10.0 # 局部代价地图的发布频率
transform_tolerance: 1.0局部代价地图的 global_frame 设置为 odom 而不是 map,原因是 AMCL 是通过 map 到 odom 这段的 tf 的跳变来切换机器人和分身的位置的,如果以 map 为基准坐标系,当机器人的位置跳变时,传感器检测到的障碍物位置也会跳变,这对于全局路径规划来说问题不大,但对于局部路径规划来说,会使机器人运动变得不平稳。所以局部代价地图的 global_frame 通常会设置为 odom。
3.4 代价地图的初始化方式
有两种方法初始化costmap_2d::Costmap2DROS对象:
-
static map(map_server)
这种情况下,costmap 初始化的长度宽度和 static map 的一样,obstacle 的信息也来自 static map。
一般用在amcl定位导航中,随着机器人的移动,使用传感器的信息更新 costmap -
rolling window
自己给一个长,宽值,设置
rolling_window参数为true,这个参数设置机器人的位置在costmap 的中心,丢弃离机器人比较远的 obstacle 信息。
一般用在在里程计坐标下的移动,机器人只关心在他周边的障碍物信息。
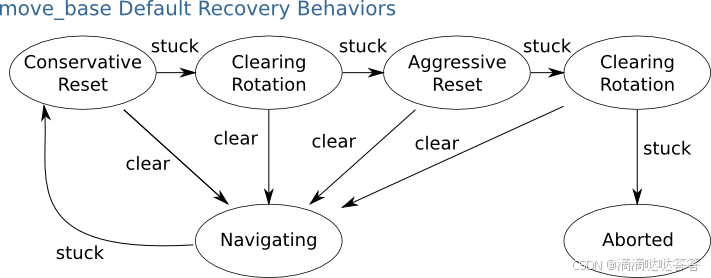
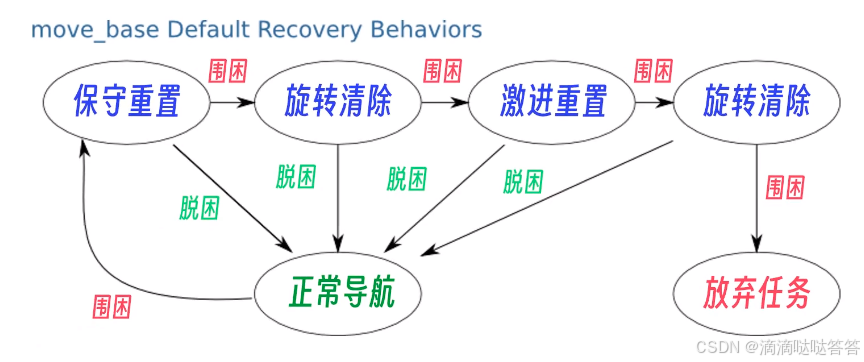
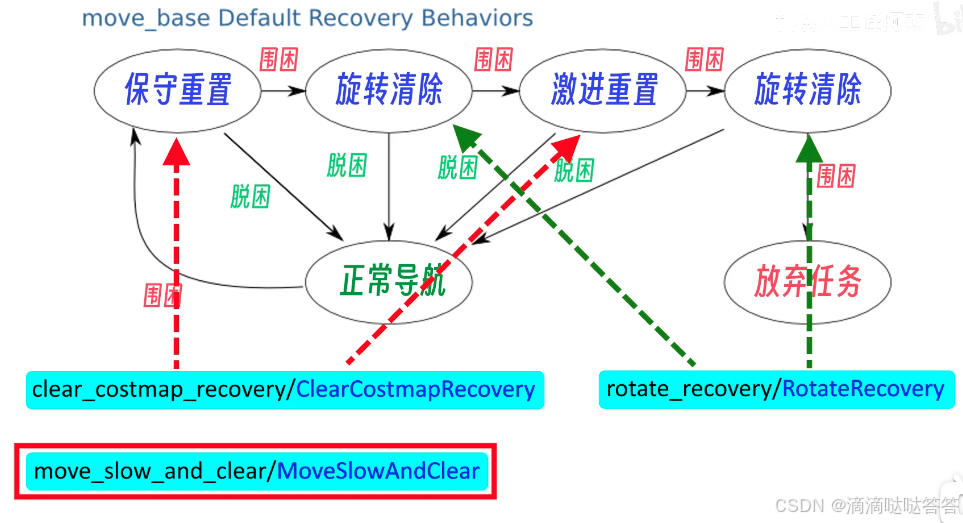
4、恢复行为 recovery_behaviors
4.1 恢复行为流程
恢复行为包含 重置 和 旋转清除。
重置行为 官方介绍:clear_costmap_recovery - ROS Wiki
旋转清除行为 官方介绍:rotate_recovery - ROS Wiki
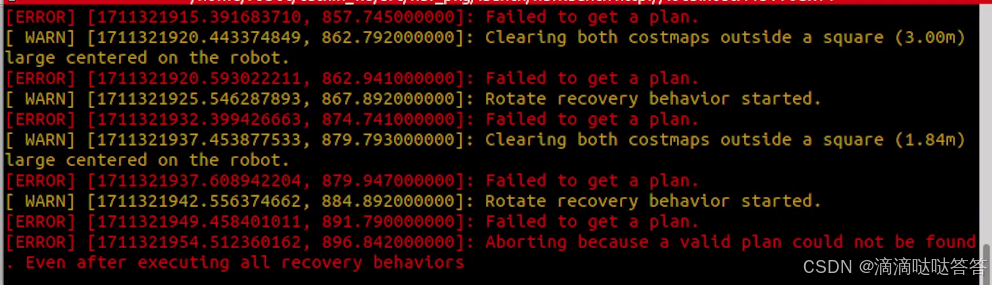
[ERROR] [1731032109.633248194, 446.913000000]: Failed to get a plan.
[ WARN] [1731032114.653816024, 451.931000000]: Clearing both costmaps outside a square (2.00m) large centered on the robot.
[ERROR] [1731032114.736247928, 452.013000000]: Failed to get a plan.
[ WARN] [1731032119.757207178, 457.031000000]: Rotate recovery behavior started.
[ERROR] [1731032126.643172274, 463.913000000]: Failed to get a plan.
[ WARN] [1731032131.664204575, 468.931000000]: Clearing both costmaps outside a square (0.00m) large centered on the robot.
[ERROR] [1731032131.745834036, 469.013000000]: Failed to get a plan.
[ERROR] [1731032136.766966988, 474.031000000]: Aborting because a valid plan could not be found. Even after executing all recovery behaviors
4.2 自定义恢复流程
自定义的恢复流程如下:
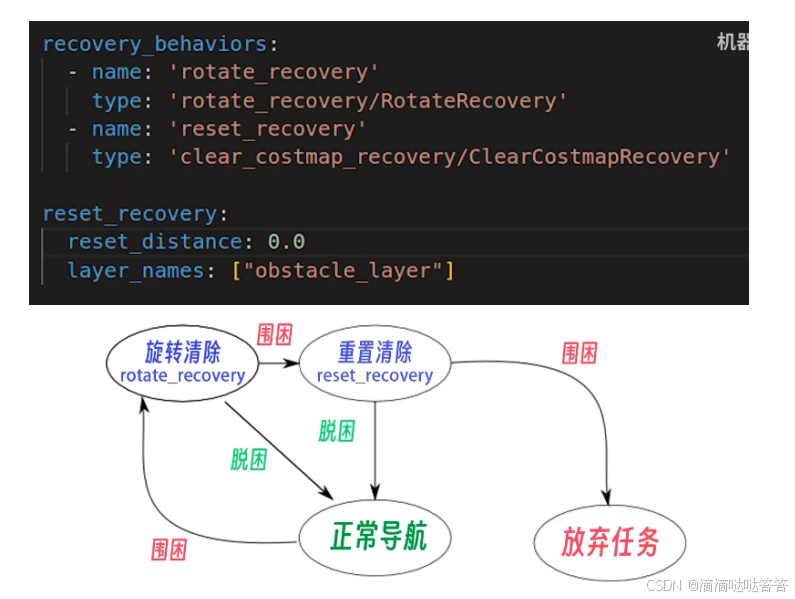
其中 reset_distance 的示意如下:
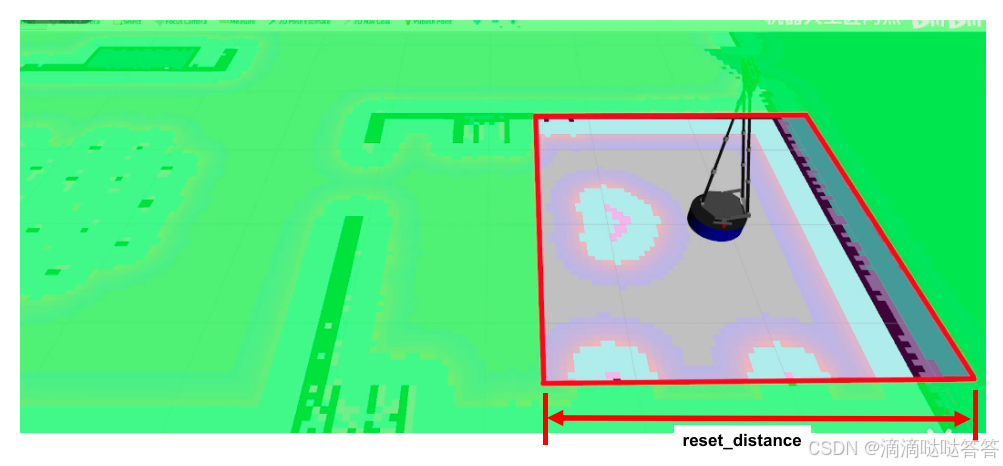
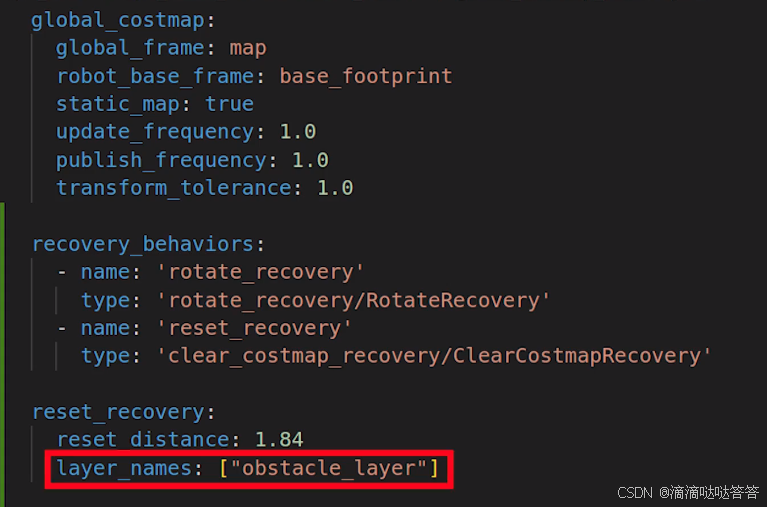
特别注意:重置行为 clear_costmap_recovery::ClearCostmapRecovery 的 layer_names 参数的默认值为 obstacles
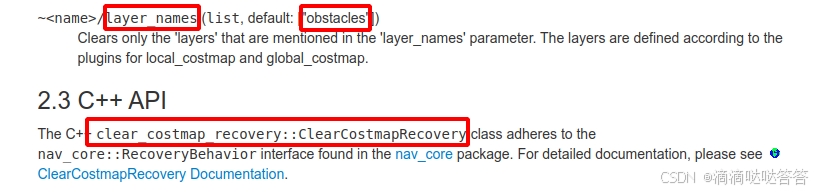
但是在 costmap_2d 的代码中,默认的障碍物层是 obstacle_layer

所以在全局代价地图的参数设置中,要把重置行为的 layer_names 修改成 obstacle_layer 。
或者在 costmap_common_params.yaml 中 通过插件(plugins)设置代价地图参数,将障碍场的名字改为 obstacled。参考说明:Pre-Hydro Parameters 和 Configuring Layered Costmaps
Pre-Hydro Parameters
Hydro and later releases use plugins for all costmap_2d layers.
If you don't provide a plugins parameter then the initialization code will assume that your configuration is pre-Hydro and will load a default set of plugins with default namespaces.
Your parameters will be moved to the new namespaces automagically.
The default namespaces are static_layer, obstacle_layer and inflation_layer.
Some tutorials (and books) still refer to pre-Hydro parameters, so pay close attention. To be safe, be sure to provide a plugins parameter.
Hydro(2013) 版本前的参数配置
Hydro 及其之后的版本为所有 costmap_2d 层使用 plugins 。
如果你没有提供 plugins 参数,那么初始化代码将假设你的配置是 Hydro 版本之前的,并将加载一组具有默认命名空间的默认 plugins 。
您的参数将自动移动到新的命名空间。
默认名称空间是 static_layer、obstacle_layer 和 inflation_layer。
一些教程(和书籍)仍然提到 Hydro 之前的参数,因此请密切关注。为了安全起见,请务必提供插件参数。
本博客自定义的恢复流程代码如下:
# 自定义恢复行为
recovery_behaviors:
- name: 'conservative_reset' # 行为名称
type: 'clear_costmap_recovery/ClearCostmapRecovery' # 行为类型
- name: 'rotate_recovery'
type: 'rotate_recovery/RotateRecovery'
- name: 'aggressive_reset'
type: 'clear_costmap_recovery/ClearCostmapRecovery'
conservative_reset: # 与上文行为名称保持一致
reset_distance: 2.0 # 清除范围,单位 m
layer_names: ["obstacles"] # 要清除哪一层地图
aggressive_reset:
reset_distance: 0.0
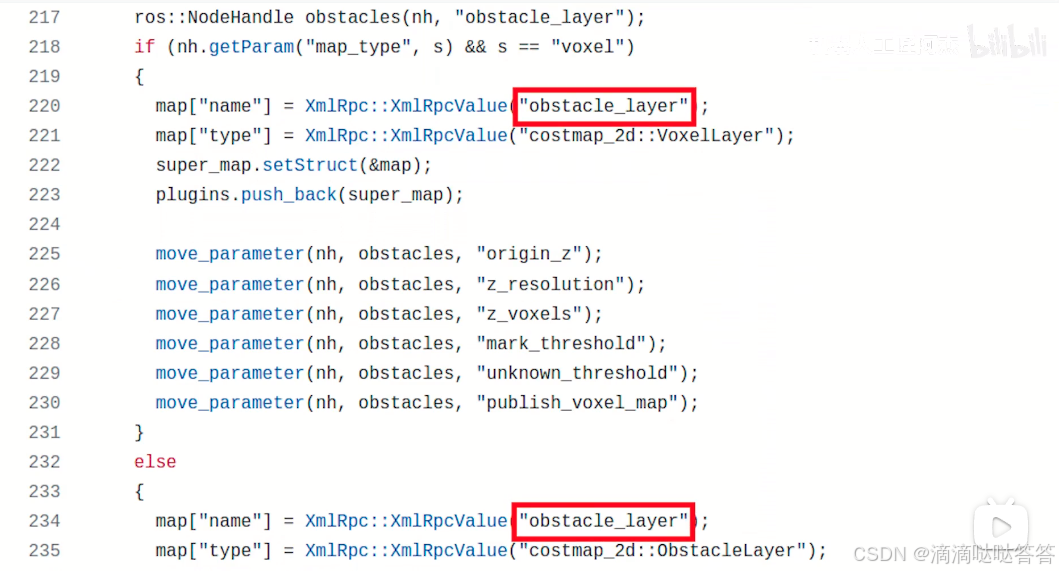
layer_names: ["obstacles"]4.3 costmap_2d 中的 VoxelLayer 和 ObstacleLayer
navigation/costmap_2d/src/costmap_2d_ros.cpp 源码
ros::NodeHandle obstacles(nh, "obstacle_layer");
if (nh.getParam("map_type", s) && s == "voxel")
{
map["name"] = XmlRpc::XmlRpcValue("obstacle_layer");
map["type"] = XmlRpc::XmlRpcValue("costmap_2d::VoxelLayer");
super_map.setStruct(&map);
plugins.push_back(super_map);
// 使用 move_parameter 函数从全局参数服务器将相关参数移动到 obstacles 的命名空间下。
move_parameter(nh, obstacles, "origin_z");
move_parameter(nh, obstacles, "z_resolution");
move_parameter(nh, obstacles, "z_voxels");
move_parameter(nh, obstacles, "mark_threshold");
move_parameter(nh, obstacles, "unknown_threshold");
move_parameter(nh, obstacles, "publish_voxel_map");
}
else
{
map["name"] = XmlRpc::XmlRpcValue("obstacle_layer");
map["type"] = XmlRpc::XmlRpcValue("costmap_2d::ObstacleLayer");
super_map.setStruct(&map);
plugins.push_back(super_map);
}参考:what difference between voxel layer and obstacle layer ?
costmap_2d::VoxelLayer 和 costmap_2d::ObstacleLayer 都是 ROS 中用于导航的代价地图障碍物层,但它们各自有不同的应用场景和特点。
4.3.1. VoxelLayer(体素层)
- 维度:三维。
- 数据结构:使用体素(Voxel)网格存储障碍物信息,即每个栅格单元内会有多个体素,用于记录不同高度的障碍物。
- 主要用途:适用于三维障碍物检测和导航环境中较复杂的场景,尤其适合处理高低不平、具有高度信息的障碍物。
- 参数:
origin_z:z 轴的起点位置。z_resolution:z 轴的分辨率(体素大小)。z_voxels:z 轴体素数量(栅格高度)。mark_threshold:将体素标记为障碍物的阈值。unknown_threshold:将体素标记为未知区域的阈值。publish_voxel_map:是否发布体素地图信息。
4.3.2 ObstacleLayer(障碍物层)
- 维度:二维。
- 数据结构:使用二维栅格网格存储障碍物信息,仅记录平面上的障碍物。
- 主要用途:适用于一般的室内、户外平面导航环境,不需要考虑高度差的场景。
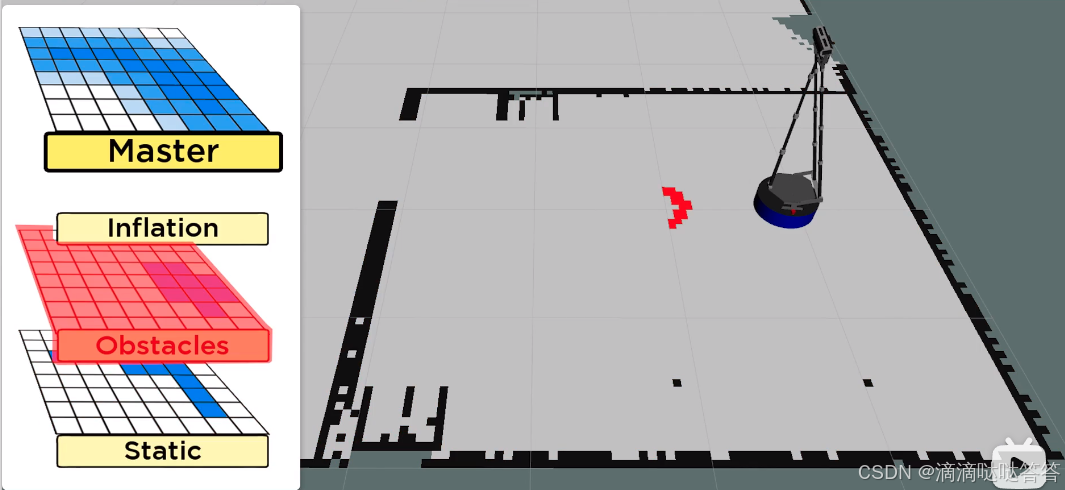
4.4 地图的分层结构
4.4.1 静态地图
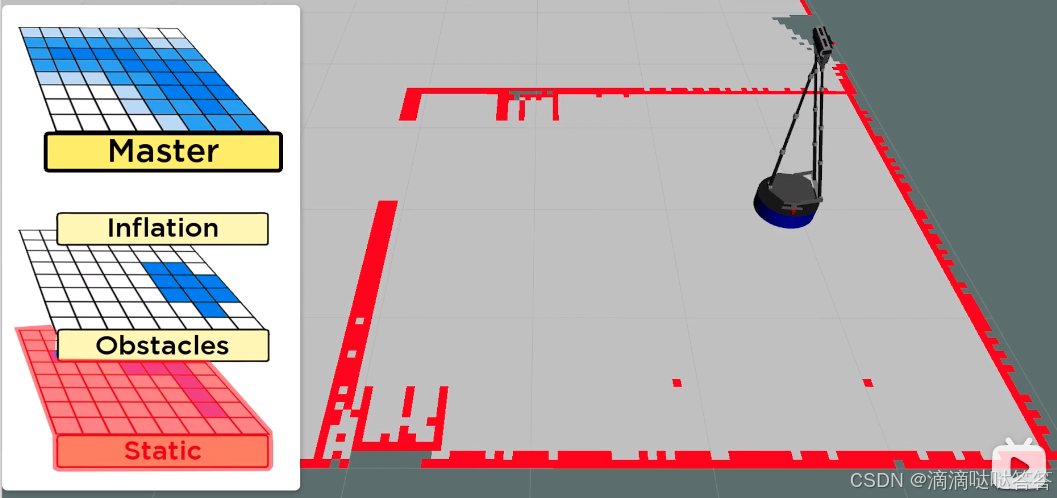
4.4.2 障碍物地图
障碍物地图是由激光雷达扫描得到的动态障碍物,重置行为只清除障碍物地图,实际上就是清除激光雷达过去探测到的动态障碍物残影,而新检测到的障碍物消息,会立刻刷新进来。叠加上 map_server 发过来的静态地图,作为重新全局路径规划的地图。
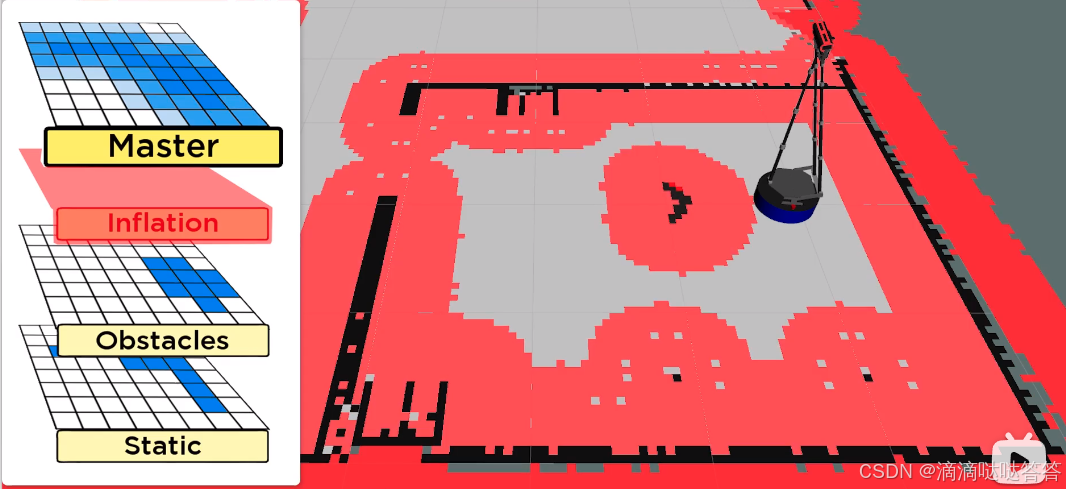
4.4.3 膨胀地图
将 静态地图 和 障碍物地图 叠加后膨胀得到的地图。
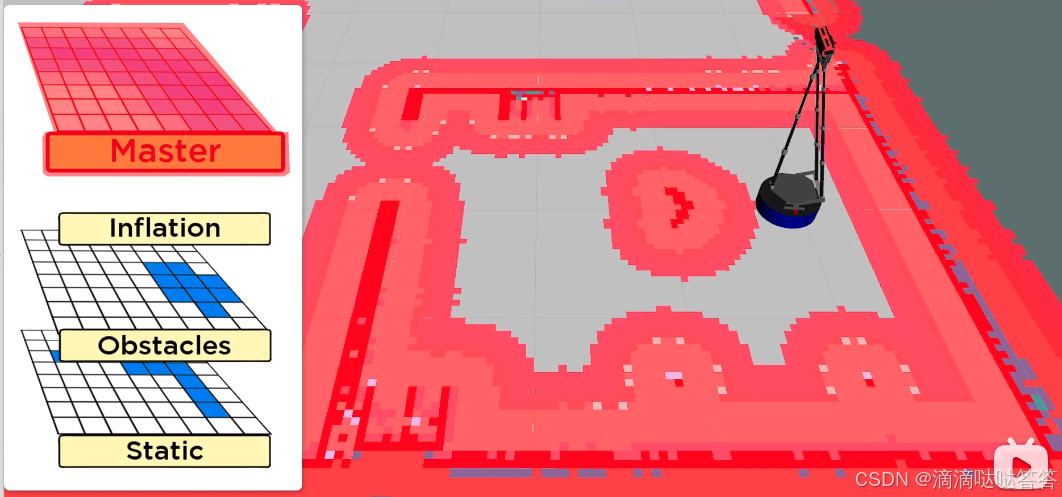
4.4.4 代价地图
由以上 3 层合并得到的代价地图。
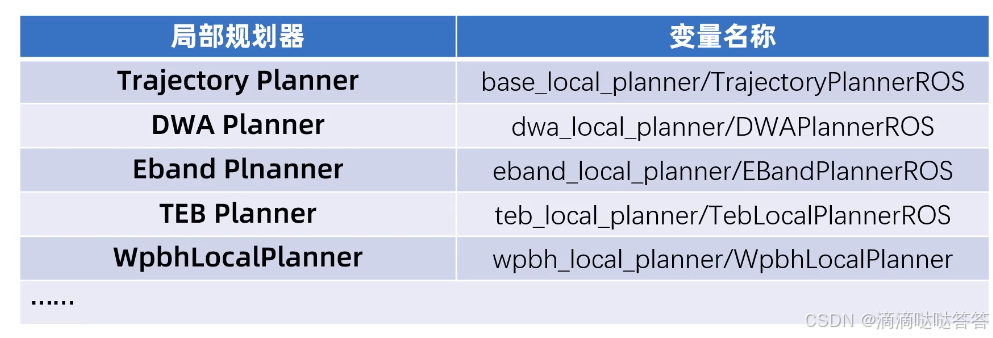
5、局部规划器 local_planner
全部的局部规划器:移动机器人常用ROS局部规划器简介(包含 Eband_local_planner)
ROS 默认使用 Trajectory Planner 局部规划器,内部实现使用 DWA 算法,但是代码质量不高。相比于 Trajectory Planner 局部规划器 ,DWA Planner 局部规划器代码的可读性更好,运行效率更高。
Eband Planner 和 TEB Planner 的实现思路相似,其中 TEB Planner 加入了时间因素的考虑,同时提供了代价地图的优化插件,运动平滑性和执行效率更高
5.1 DWA Planner 局部规划器
DWA算法针对的机器人模型是差分机器人和全向机器人。
DWA 官方介绍:dwa_local_planner - ROS Wiki
<!-- 设置 move_base 的局部路径规划器为 DWA 规划器 -->
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/dwa_local_planner_params.yaml" command="load" />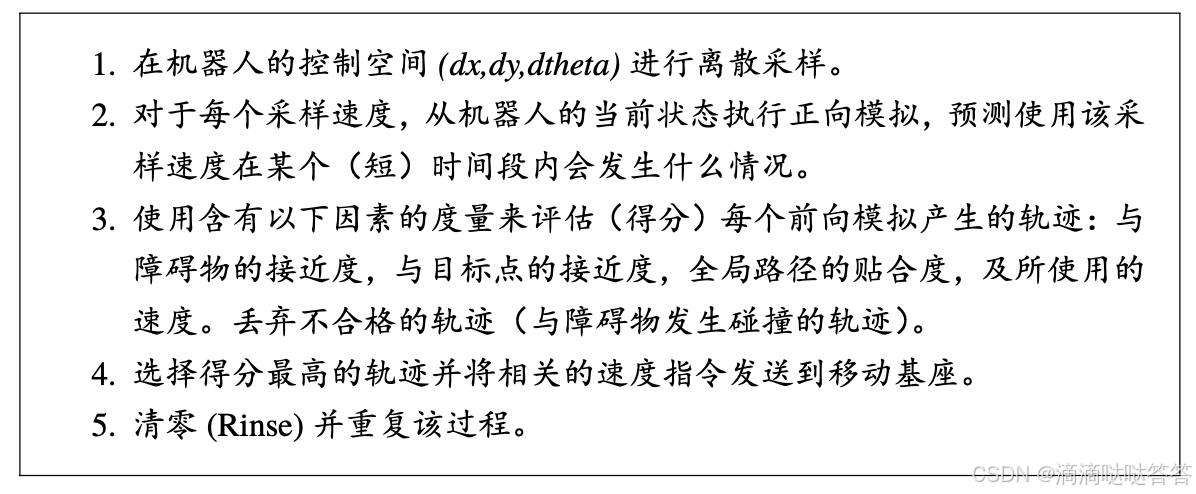
- 动态窗口算法(Dynamic Window Approaches, DWA) 是基于预测控制理论的一种次优方法,因其在未知环境下能够安全、有效的避开障碍物, 同时具有计算量小, 反应迅速、可操作性强等特点。
- DWA算法属于局部路径规划算法。
- DWA算法的核心思想:根据移动机器人当前的位置状态和速度状态在速度空间
中采样多种满足移动机器人硬件约束的速度,然后计算机器人在这些速度情况下一定时间内的运动轨迹, 并通过评价函数对该轨迹进行评价,最后选出评价最优的轨迹所对应的速度来作为移动机器人运动速度, 如此循环直至移动机器人到达目标点。
- 对于无人驾驶汽车而言,情况类似,将车辆的位置变化转化为线速度和角速度控制,避障问题转变成空间中的运动约束问题,这样可以通过运动约束条件选择局部最优的路径。
DWA 包含速度采样、轨迹预测(推算)、轨迹评价。详细信息见 【路径规划】局部路径规划算法——DWA算法。
① 速度采样会综合考虑底盘加速度的限制,与障碍物保持有效的刹车距离,以及尽快运动到轨迹终点这 3 个因素。
② 轨迹评价有 3 个标准。分别是轨迹和全局路径的贴合程度;轨迹末端和导航目标点的距离;轨迹和障碍物之间的距离。综合考虑过程、目标和风险这三个因素挑选最符合标准的轨迹。
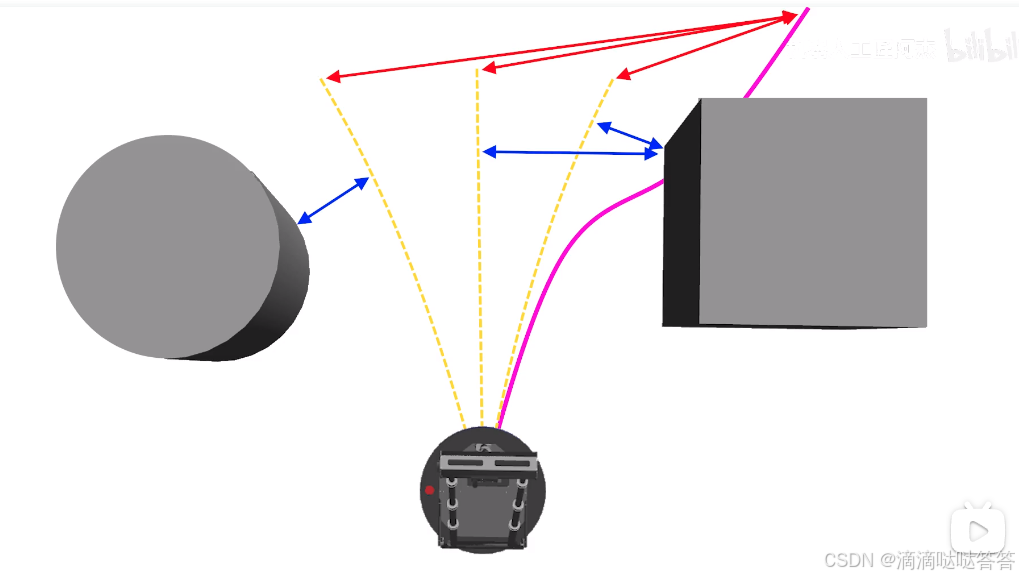
在 rviz 中添加 Path 订阅话题 /move_base/DWAPlannerROS/local_plan;添加 PointCloud2 订阅话题 /move_base/DWAPlannerROS/trajectory_cloud。显示如下,图中白色的轨迹是 DWA 生成的备选轨迹,绿色的轨迹为最终挑选的轨迹。
5.1.1 DWA 局部规划器的参数设置
DWAPlannerROS:
# 速度参数,按照机器人的真实性能设置
max_vel_x: 0.3 # 最大x方向速度
min_vel_x: -0.05 # 最小x方向速度(设置负数将会允许倒车,适合激光雷达可以扫描到后方的机器人)
max_vel_y: 0.0 # 差分驱动机器人的最大y方向速度为 0.0
min_vel_y: 0.0 # 差分驱动机器人的最小y方向速度为 0.0
max_vel_trans: 0.3 # 最大平移速度
min_vel_trans: 0.01 # 最小平移速度(建议不要设置为 0.0 )
trans_stopped_vel: 0.1 # 当平移速度小于这个值,就让机器人停止
acc_lim_trans: 2.5 # 最大平移加速度
acc_lim_x: 2.5 # x方向的最大加速度上限
acc_lim_y: 0.0 # y方向的加速度上限(差分驱动机器人应该设置为 0.0 )
max_vel_theta: 1.0 # 最大旋转速度,略小于基座的功能
min_vel_theta: -0.01 # 当平移速度可以忽略时的最小角速度
theta_stopped_vel: 0.1 # 当旋转速度小于这个值,就让机器人停止
acc_lim_theta: 6.0 # 旋转的加速度上限
# 目标容差参数,对机器人到达导航终点的判定条件
yaw_goal_tolerance: 0.1 # 目标航向容差
xy_goal_tolerance: 0.05 # 目标xy容差
latch_xy_goal_tolerance: false # 到达目标容差范围后,停止移动,只旋转调整航向
# 向前模拟参数,决定了生成的轨迹的长度和数量
sim_time: 1.7 # 模拟时间,默认值 1.7
vx_samples: 3 # x方向速度采样数,默认值 3
vy_samples: 1 # 差分驱动机器人y方向速度采样数,只有一个样本
vtheta_samples: 20 # 旋转速度采样数,默认值 20
# 轨迹评分参数,影响最终轨迹的挑选
path_distance_bias: 32.0 # 贴合全局路径的权重,默认值 32.0
goal_distance_bias: 24.0 # 接近导航目标点的权重,默认值 24.0
occdist_scale: 0.01 # 控制器避障的权重,默认值 0.01
forward_point_distance: 0.325 # 从机器人到评分点的位置,默认值 0.325
stop_time_buffer: 0.2 # 在碰撞前机器人必须停止的时间长度,留出缓冲空间,默认值 0.2
scaling_speed: 0.25 # 缩放机器人速度的绝对值,默认值 0.25
max_scaling_factor: 0.2 # 机器人足迹在高速时能缩放的最大系数,默认值 0.2
# 防振动参数
oscillation_reset_dist: 1.05 # 重置振动标志前需要行进的距离,默认值 0.05
# 辅助调试选项
publish_traj_pc : true # 是否在 RViz 里发布轨迹
publish_cost_grid_pc: true # 是否在 RViz 里发布代价网格
global_frame_id: odom # 基础坐标系
# 差分驱动机器人配置
holonomic_robot: false # 是否全向移动机器人
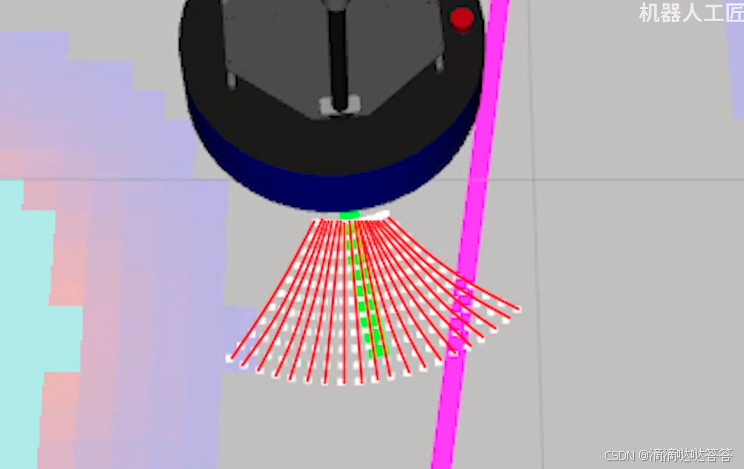
5.1.2 对 DWA 参数进行动态调试
rosrun rqt_reconfigure rqt_reconfigure
5.2 TEB Planner 局部规划器
TEB 局部规划器通过以下参数区分 阿克曼转向机器人 和 差速驱动机器人。TEB 在调整机器人的朝向时,会倾向于使用走弧线倒车的方式,而不是直接原地旋转,所以 TEB 天生适合阿克曼底盘这种不能原地旋转的机器人。
# ********************** 转弯半径相关 ********************
min_turning_radius: 1.7 # 最小转弯半径。差速驱动机器人设置为 0。!!!!!!
wheelbase: 0.68 # 轴距。只有在 cmd_angle_instead_rotvel 为 true 时才有效
cmd_angle_instead_rotvel: False # 是否将收到的角速度消息转换为相应的转向角 [-pi/2,pi/2]。设置成 True 时,话题 vel_msg.angular.z 内的数据是转轴角度。
# ********************************************************************
# 用于执行最小转弯半径的优化权重(仅适用于阿克曼机器人)
weight_kinematics_turning_radius: 1.0TEB 官方介绍:teb_local_planner - ROS Wiki
<!-- 设置 move_base 的局部路径规划器为 TEB 规划器 -->
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
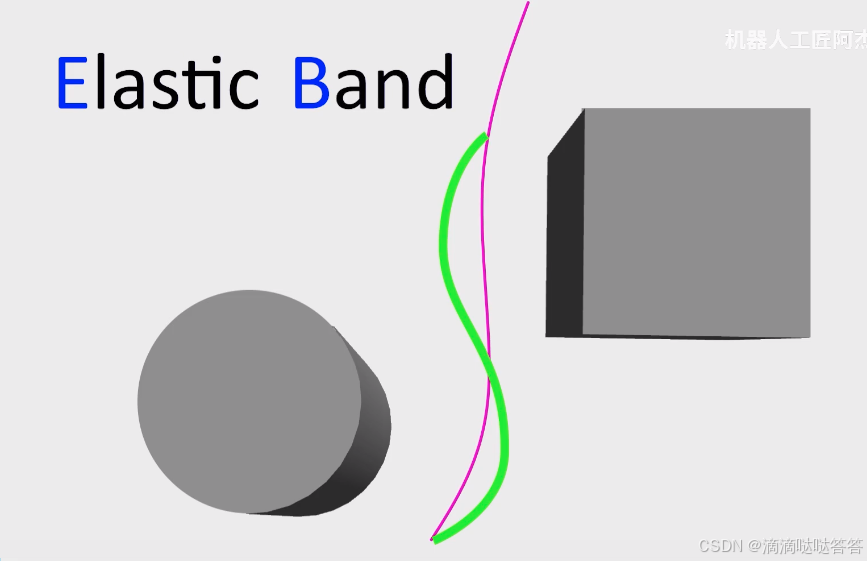
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/teb_local_planner_params.yaml" command="load" />时间弹力带(Timed Elastic Band, TEB),TEB 会在全局规划器发来的全局路径上选取一段路径进行优化,在选取的这一段路径的起点和终点之间拉一根弹力带。参考:TEB轨迹优化算法
- Elastic Band(弹力带):连接起点和终点的路径,这个路径可以变形,变形的条件就是受到外力。将所有约束当做弹力带受到的外力,其中全局路径对弹力带产生吸引力,障碍物对弹力带产生排斥力。将这些外力叠加就得到了 TEB 生成的局部路径。
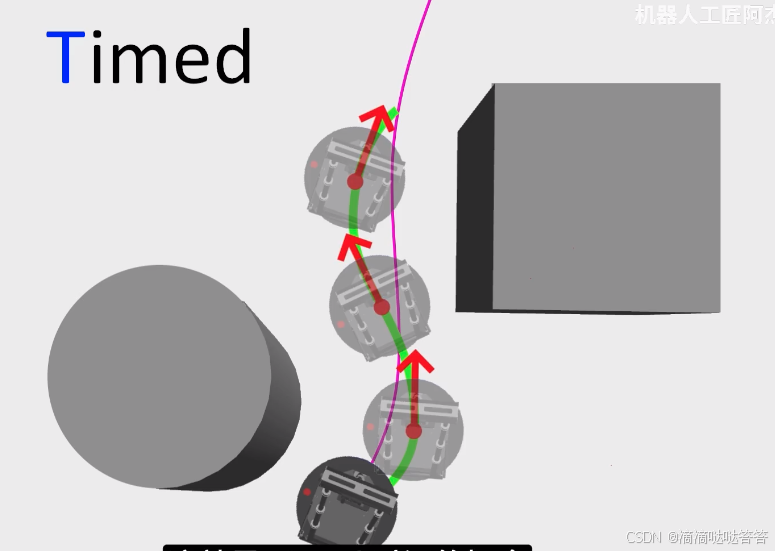
- TEB 会根据机器人的速度和加速度等运动信息,在弹力带上预测未来的连续几个时间单位的机器人的位姿,这里的每个位姿之间的时间间隔都是相等的,为
。
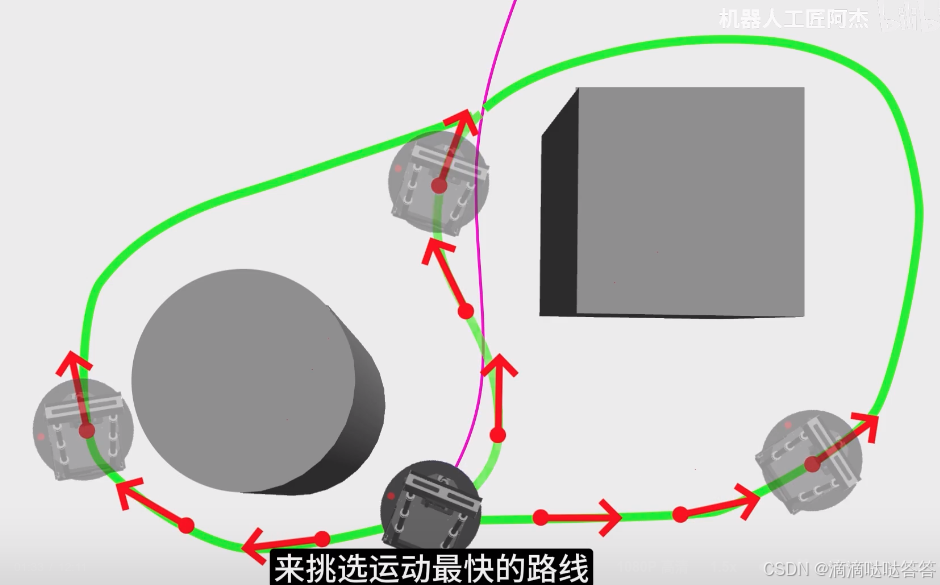
- 如果存在多条路线时,就会按照相同时间内机器人移动的距离远近来挑选距离最优的路线
- TEB 生成的局部轨迹由一系列带有时间信息的离散位姿(pose)组成,通过优化算法,使最终由这些离散位姿组成的轨迹能够达到时间最优、距离最优、远离障碍物等要求,同时限制速度与加速度使轨迹满足机器人的运动学约束。
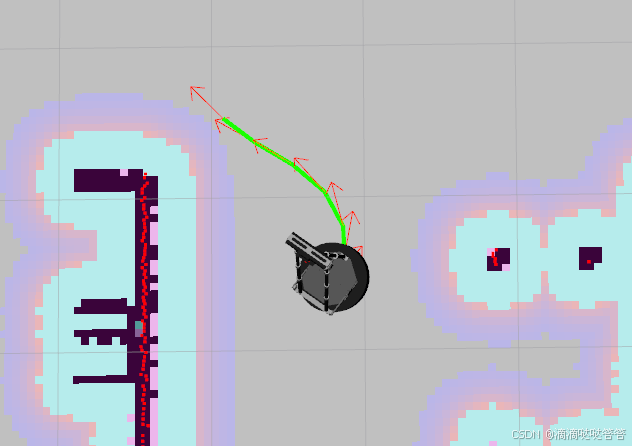
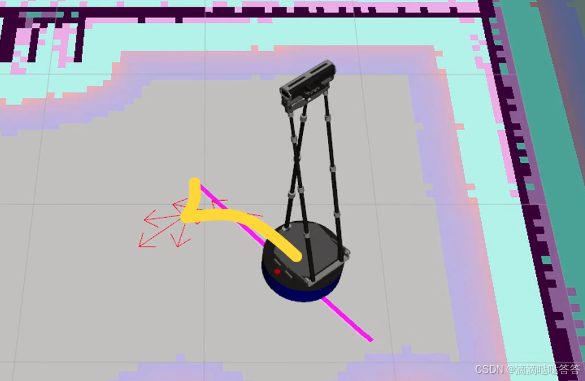
在 rviz 中添加 Path 订阅话题 /move_base/TebLocalPlannerROS/local_plan;添加 PoseArray 订阅话题 /move_base/TebLocalPlannerROS/teb_poses 。显示如下,图中绿色的轨迹是 TEB 规划的局部路径,红色的箭头为 TEB 预测的未来连续几个时间单位机器人将会到达的位姿。
和 DWA 相比,TEB 规划器具有更强的脱困能力。TEB 在调整机器人的朝向时,会倾向于使用走弧线倒车的方式,而不是直接原地旋转,所以 TEB 天生适合阿克曼底盘这种不能原地旋转的机器人。
5.2.1 安装 TEB 局部规划器
sudo apt-get install ros-noetic-teb-local-planner5.2.2 TEB 局部规划器的参数设置
TebLocalPlannerROS:
odom_topic: odom
# 轨迹生成策略相关
teb_autosize: True # 是否允许改变轨迹的时域长度,也就是改变 dt_ref
dt_ref: 0.5 # 路径上的两个相邻姿态的默认距离
dt_hysteresis: 0.1 # 允许改变的时域解析度的浮动范围
global_plan_overwrite_orientation: True # 是否修正全局路径中的临时局部路径点的朝向
max_global_plan_lookahead_dist: 2.0 # 最大向前看距离
feasibility_check_no_poses: 2 #在判断生成的轨迹是否冲突时使用,此时设置为2,即从轨迹起点开始逐个检查轨迹上的2个点,若2个点均不发生碰撞,则认为本次轨迹有效。
# 运动性能相关
max_vel_x: 0.4 # 最大速度
max_vel_x_backwards: 0.2 # 最大倒车速度,设置为0或者负数将导致错误。减少倒车应该修改倒车权重,不改这里。
max_vel_theta: 1.0 # 最大转向角速度,跟 min_turning_radius 相关 (r = v / omega)
acc_lim_x: 0.5 # 最大线加速度
acc_lim_theta: 1.0 # 最大角加速度
# ********************** 转弯半径相关 ********************
min_turning_radius: 0.0 # 小转弯半径。如果设为 0,表示可以原地转弯。
wheelbase: 0.31 # 只有在 cmd_angle_instead_rotvel为true时才有效
cmd_angle_instead_rotvel: False # 是否将收到的角速度消息转换为操作上的角度变化。设置成 True 时,话题 vel_msg.angular.z 内的数据是转轴角度。
# ********************************************************************
# 车体轮廓描述
footprint_model: # types可选项: "point", "circular", "two_circles", "line", "polygon"
type: "circular"
# 对 type "circular" 有效的参数:
radius: 0.17
# 对 type "line" 有效的参数:
line_start: [0.0, 0.0]
line_end: [0.35, 0.0]
# 对 type "two_circles" 有效的参数:
front_offset: 0.35
front_radius: 0.35
rear_offset: 0.35
rear_radius: 0.35
# 对 type "polygon" 有效的参数:
vertices: [ [0.35, 0.0], [-0.2, -0.25], [0.2, -0.25]]
# 到达目标点的判断容差
xy_goal_tolerance: 0.2
yaw_goal_tolerance: 0.1
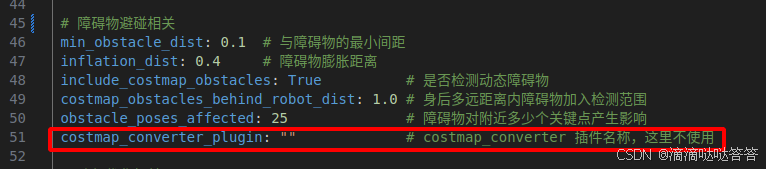
# 障碍物避碰相关
min_obstacle_dist: 0.1 # 与障碍物的最小间距
inflation_dist: 0.4 # 障碍物膨胀距离
include_costmap_obstacles: True # 是否检测动态障碍物
costmap_obstacles_behind_robot_dist: 1.0 # 身后多远距离内障碍物加入检测范围
obstacle_poses_affected: 25 # 障碍物对附近多少个关键点产生影响
costmap_converter_plugin: "" # costmap_converter 插件名称,这里不使用
# 路径优化相关
no_inner_iterations: 3 # 图优化optimizer的迭代次数
no_outer_iterations: 3 # 外循环迭代次数
penalty_epsilon: 0.1 # 为所有的惩罚项增加一个小的安全余量
weight_max_vel_x: 2 # 平移速度的优化权重
weight_max_vel_theta: 1 # 角速度的优化权重
weight_acc_lim_x: 1 # 平移加速度的优化权重
weight_acc_lim_theta: 1 # 角加速度的优化重量
weight_kinematics_nh: 1000 # 非完整运动学的优化权重
weight_kinematics_forward_drive: 1 # 往前移动的权重
weight_optimaltime: 1 # 耗时权重
weight_obstacle: 50 # 与障碍物保持距离的权重
# 多线规划
enable_homotopy_class_planning: True # 激活多线规划
enable_multithreading: True # 多线程计算
max_number_classes: 2 # 规划的路径线数上限
selection_cost_hysteresis: 1.0 # 路径轨迹入选的评价上限
selection_obst_cost_scale: 1.0 # 障碍物评价在入选标准中的缩放倍率
selection_alternative_time_cost: False # 时间成本是否要进行平方计算
roadmap_graph_no_samples: 15 # 为创建 roadmap graph 而生成的样本数
roadmap_graph_area_width: 5 # 关键点采样的宽度,单位为米。5.2.3 对 TEB 参数进行动态调试
rosrun rqt_reconfigure rqt_reconfigure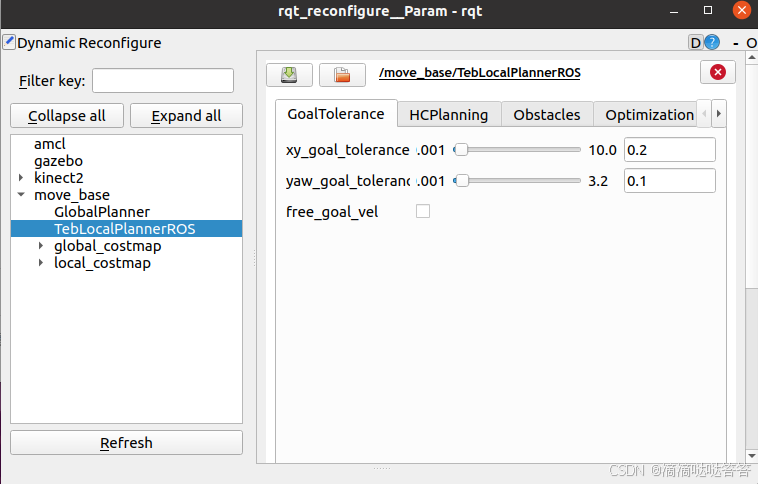
5.2.4 costmap_converter 插件
启用 costmap_converter_plugin 插件可以获得更好的规划性能和避障效果
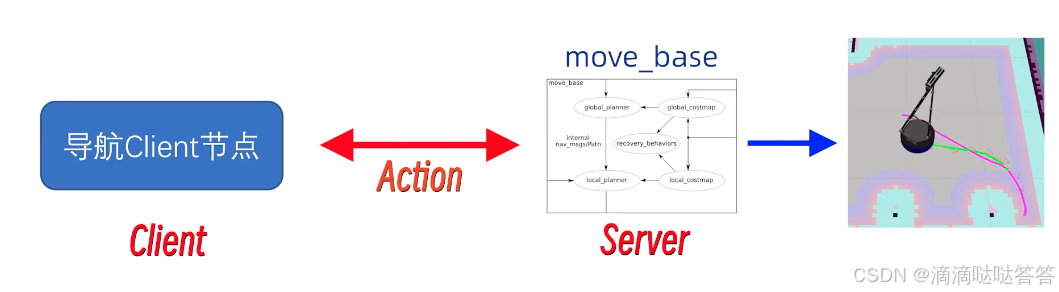
四、导航的 Action 编程接口
1 C++ 实现
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main(int argc, char** argv)
{
ros::init(argc, argv, "demo_simple_goal");
// tell the action client that we want to spin a thread by default
// 创建 MoveBaseClient 的实例 ac,并连接到名为 "move_base" 的 action server。
// true 表示 表示 spin a thread,即让 action client 使用自己的线程来管理内部事件循环。
// 这意味着 client 将在后台管理与 server 的通信,不会阻塞主线程。这样主线程可以继续执行其他操作,而不需要等待 action server 就绪。
MoveBaseClient ac("move_base", true);
// wait for the action server to come up
while(!ac.waitForServer(ros::Duration(5.0)))
{
ROS_INFO("Waiting for the move_base action server to come up");
}
move_base_msgs::MoveBaseGoal goal;
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = -3.0;
goal.target_pose.pose.position.y = 2.0;
goal.target_pose.pose.orientation.w = 1.0;
ROS_INFO("Sending goal");
ac.sendGoal(goal);
ac.waitForResult();
if(ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("Mission complete!");
else
ROS_INFO("Mission failed ...");
return 0;
}2 Python实现
#!/usr/bin/env python3
# coding=utf-8
import rospy
import actionlib
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
if __name__ == "__main__":
rospy.init_node("simple_goal")
# 生成一个导航请求客户端
ac = actionlib.SimpleActionClient('move_base',MoveBaseAction)
# 等待服务器端启动
ac.wait_for_server()
# 构建目标航点消息
goal = MoveBaseGoal()
# 目标航点的参考坐标系
goal.target_pose.header.frame_id="map"
# 目标航点在参考坐标系里的三维数值
goal.target_pose.pose.position.x = -3.0
goal.target_pose.pose.position.y = 2.0
goal.target_pose.pose.position.z = 0.0
# 目标航点在参考坐标系里的朝向信息
goal.target_pose.pose.orientation.x = 0.0
goal.target_pose.pose.orientation.y = 0.0
goal.target_pose.pose.orientation.z = 0.0
goal.target_pose.pose.orientation.w = 1.0
# 发送目标航点去执行
ac.send_goal(goal)
rospy.loginfo("开始导航……")
ac.wait_for_result()
if ac.get_state() == actionlib.GoalStatus.SUCCEEDED:
rospy.loginfo("导航成功!")
else:
rospy.loginfo("导航失败……")
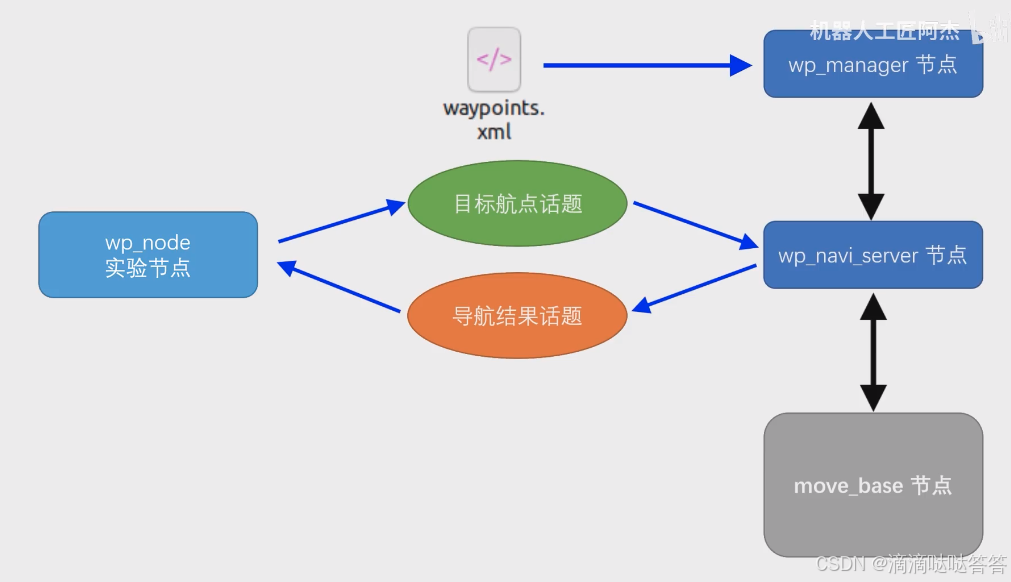
五、航点导航插件
① 下载插件
git clone https://github.com/6-robot/waterplus_map_tools.git② 运行插件
roslaunch waterplus_map_tools add_waypoint_simulation.launch该 launch 的具体代码如下:
<launch>
<!-- Map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find wpr_simulation)/maps/map.yaml"/>
<!-- RViz and TF -->
<arg name="rvizconfig" default="$(find waterplus_map_tools)/rviz/editwaypoints.rviz" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /map /base_link 100"/>
<!-- Map tools -->
<node pkg="waterplus_map_tools" type="wp_edit_node" name="wp_edit_node" output="screen" />
</launch>
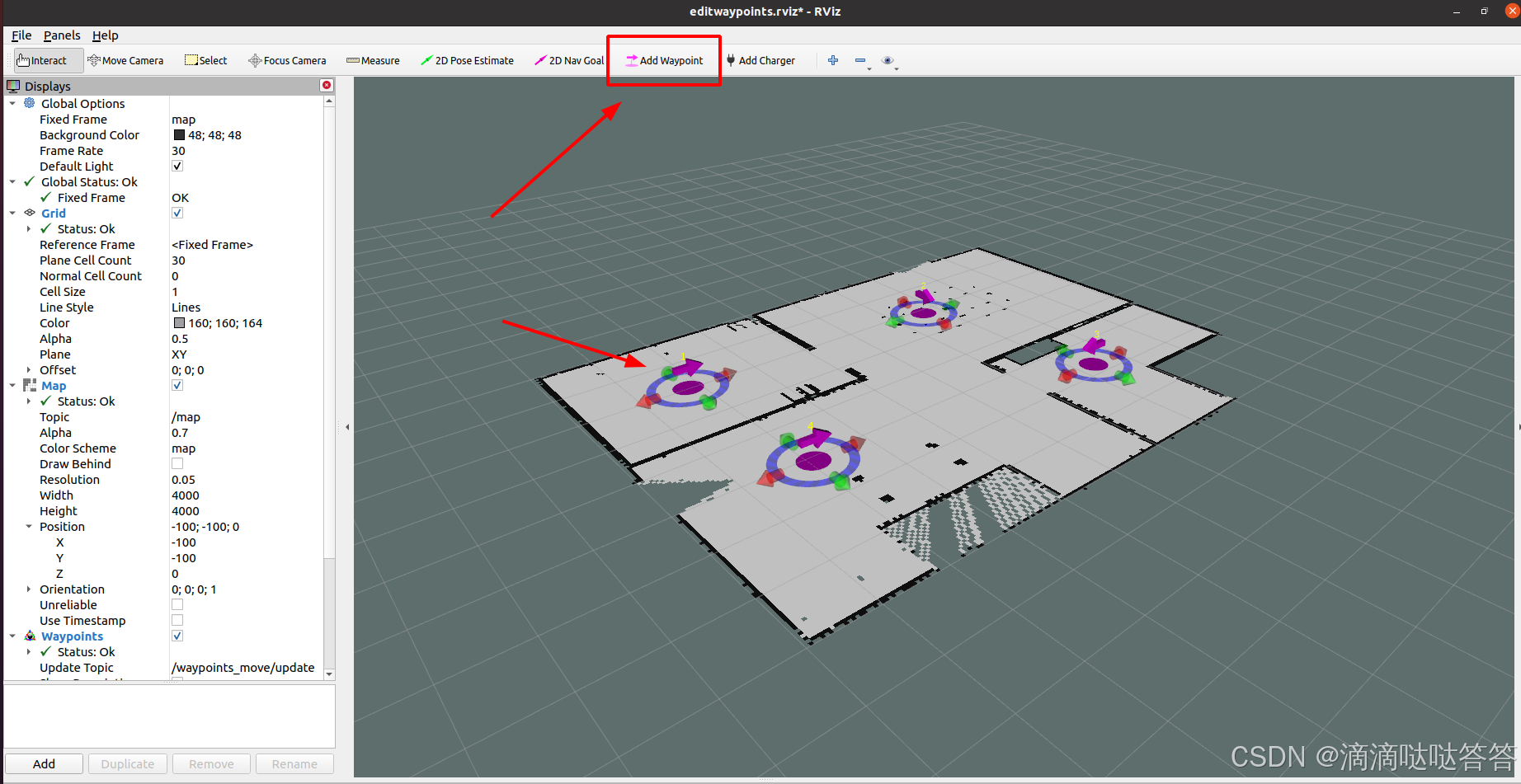
③ 点击 Add Waypoint,按住鼠标左键画圈 ,添加航点。(鼠标左键点击航点上的箭头可以调整航点)
④ 保持航点信息至主文件夹,文件为 waypoints.xml 。
rosrun waterplus_map_tools wp_saver⑤ 在 nav.launch 中添加如下代码,集成航点导航插件
<!-- 航点导航插件 -->
<node pkg="waterplus_map_tools" type="wp_navi_server" name="wp_navi_server" output="screen" />
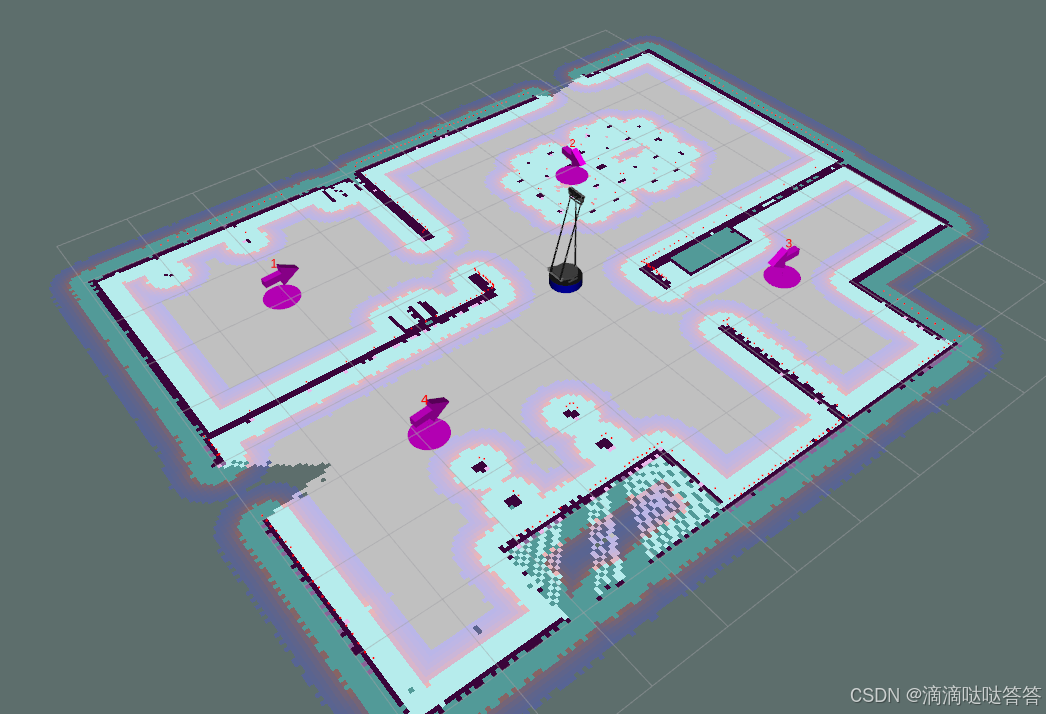
<node pkg="waterplus_map_tools" type="wp_manager" name="wp_manager" output="screen" />在 rviz 中添加 Marker 订阅话题 /waypoints_marker。航点信息可视化如下:
注意: wp_manager.cpp 中存储了 waypoints.xml 文件的路径,如下所示:
int main(int argc, char** argv)
{
ros::init(argc, argv, "wp_waypoint_manager");
// waypoints.xml所在的文件夹
std::string strLoadFile;
char const* home = getenv("HOME");
strLoadFile = home;
strLoadFile += "/test/waypoints.xml";
// 其他代码
}⑥ Python实现
#!/usr/bin/env python3
# coding=utf-8
import rospy
from std_msgs.msg import String
# 导航结果回调函数
def resultNavi(msg):
rospy.loginfo("导航结果 = %s",msg.data)
if __name__ == "__main__":
rospy.init_node("demo_map_tools")
# 发布航点名称话题
navi_pub = rospy.Publisher("/waterplus/navi_waypoint",String,queue_size=10)
# 订阅导航结果话题
result_sub = rospy.Subscriber("/waterplus/navi_result",String,resultNavi,queue_size=10)
# 延时1秒钟,让后台的话题发布操作能够完成
rospy.sleep(1)
# 构建航点名称消息包
msg = String()
msg.data = '1'
# 发送航点名称消息包
navi_pub.publish(msg)
# 构建循环让程序别退出,等待导航结果
rate = rospy.Rate(10)
while not rospy.is_shutdown():
rate.sleep()参考:
ros 导航中出现的costmap_ros costmap-CSDN博客

















 3090
3090

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









