







 本文介绍了如何使用STM32通过定时器的输出比较功能来驱动舵机。首先,详细阐述了定时器初始化、GPIO设置和输出比较单元的配置步骤。接着,讲解了舵机的正确接线方式。最后,提供了初始化代码、占空比配置函数和舵机角度控制函数的实现,帮助理解占空比与舵机角度的关系。
本文介绍了如何使用STM32通过定时器的输出比较功能来驱动舵机。首先,详细阐述了定时器初始化、GPIO设置和输出比较单元的配置步骤。接着,讲解了舵机的正确接线方式。最后,提供了初始化代码、占空比配置函数和舵机角度控制函数的实现,帮助理解占空比与舵机角度的关系。
一、定时输出比较初始化步骤
- RCC开启时钟(包括定时器与GPIOA需要的时钟)
- 配置GPIO口参数
- 配置定时器参数
- 配置输出比较单元(CCR值、输出比较模式,极性选择和输出使能)
- 开启定时器
二、舵机接线
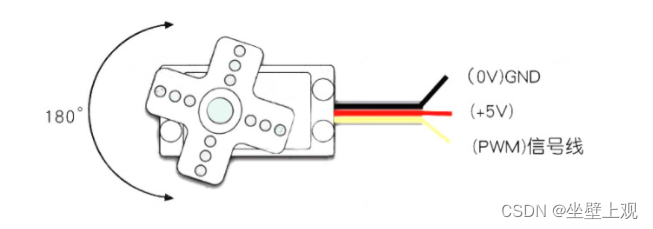
这里的5V可以接到DAP等下载器上的5V引脚
(PWM)信号线接到配置的输出比较引脚上
(0V)GND接地
这里的5V可以接到DAP等下载器上的5V引脚
(PWM)信号线接到配置的输出比较引脚上
(0V)GND接地
 1万+
1616
433
1万+
1616
433

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























