







作为纯科研小白,刚接触slam点云配准方向,真的是一头雾水。找了很多csdn上的文章,一直没办法真正复现出来icp配准,大大打击了积极性。
一开始在window系统进行cmake编译,但是出现的问题一直解决不了,比如:链接问题等,文心一言搜索了很多,依旧无法解决,还是转战ubuntu(版本号:20.04)进行操作。
发现相比与window,还是linux系统更加方便。淋过雨的人,更懂得为他人撑伞。把最近发现的好文章、复现的过程记录一下。
1.对ROS的安装的认识+VS配置和安装
2.ubuntu安装之后一些调整
Ubuntu系统安装之后首需要做的事情_ubuntu安装后需要做什么-CSDN博客
3.PCL学习
作为小白,一开始在csdn上找代码,然后直接cmake运行,后来经同门了解到:要从github上找代码,根据README.md配置相应环境进行代码运行。
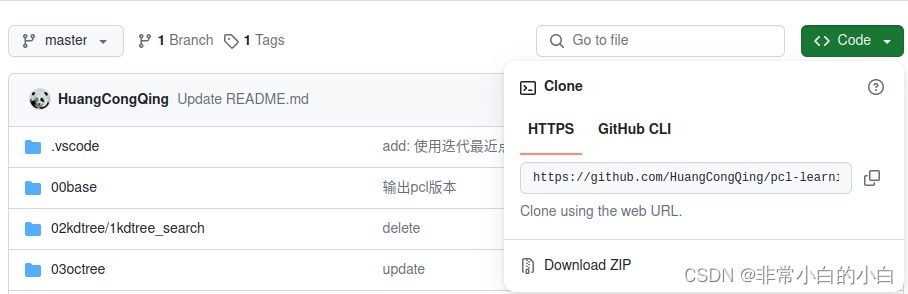
GitHub - HuangCongQing/pcl-learning: 🔥PCL(Point Cloud Library)点云库学习记录
有了正确的方向,才成功跑出来第一个代码。
pcl相关文档:
4.第一个项目icp
把github的压缩包下载下来:1.Code 2. Download ZIP
解压缩在主目录,点击右键,选择用VSCode(先安装好VSCode)打开。
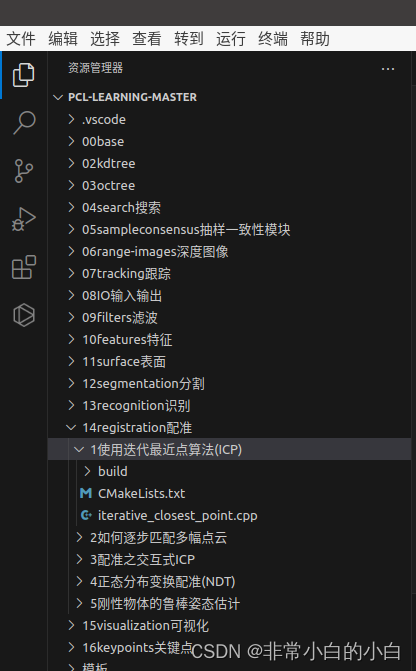
选中VSCode的1使用迭代最近点算法(ICP),点击右键打开集成终端,开始进行编译。
在集成终端输入下面代码即可:
mkdir build
cd build
cmake .. // 对上一级进行编译
make // 生成可执行文件
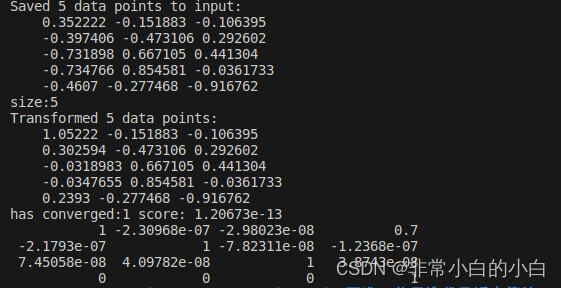
./iterative_closest_point // 运行可执行文件最后结果:
5.cmake 更高版本的下载(卡点记录)
Ubuntu20.04配置Cmake 3.23.1_ubuntu20安装cmake二进制-CSDN博客
我是跟着这个作者来的,在环境变量那里有点卡点。
copy其中的内容到
/usr/local/bin/cmake这一步就是在终端输入:sudo cp -r ./* /usr/local/bin/cmake/
接着终端输入输入:
vim ~/.bashrc进入环境变量调整模式。
按 i 进入插入模式,把地址插入到最后一行。
export PATH=$PATH:/usr/local/bin/cmake/bin/按“ESC”退出插入模式 ,“:wq”进行保存以后就可以关掉环境变量页面了。
修改完后注意要在终端输入以下代码重新激活:
source ~/.bashrccmake安装就成功了(注意解压缩之后的文件放在主目录)。
-end-
















 4819
4819











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









