






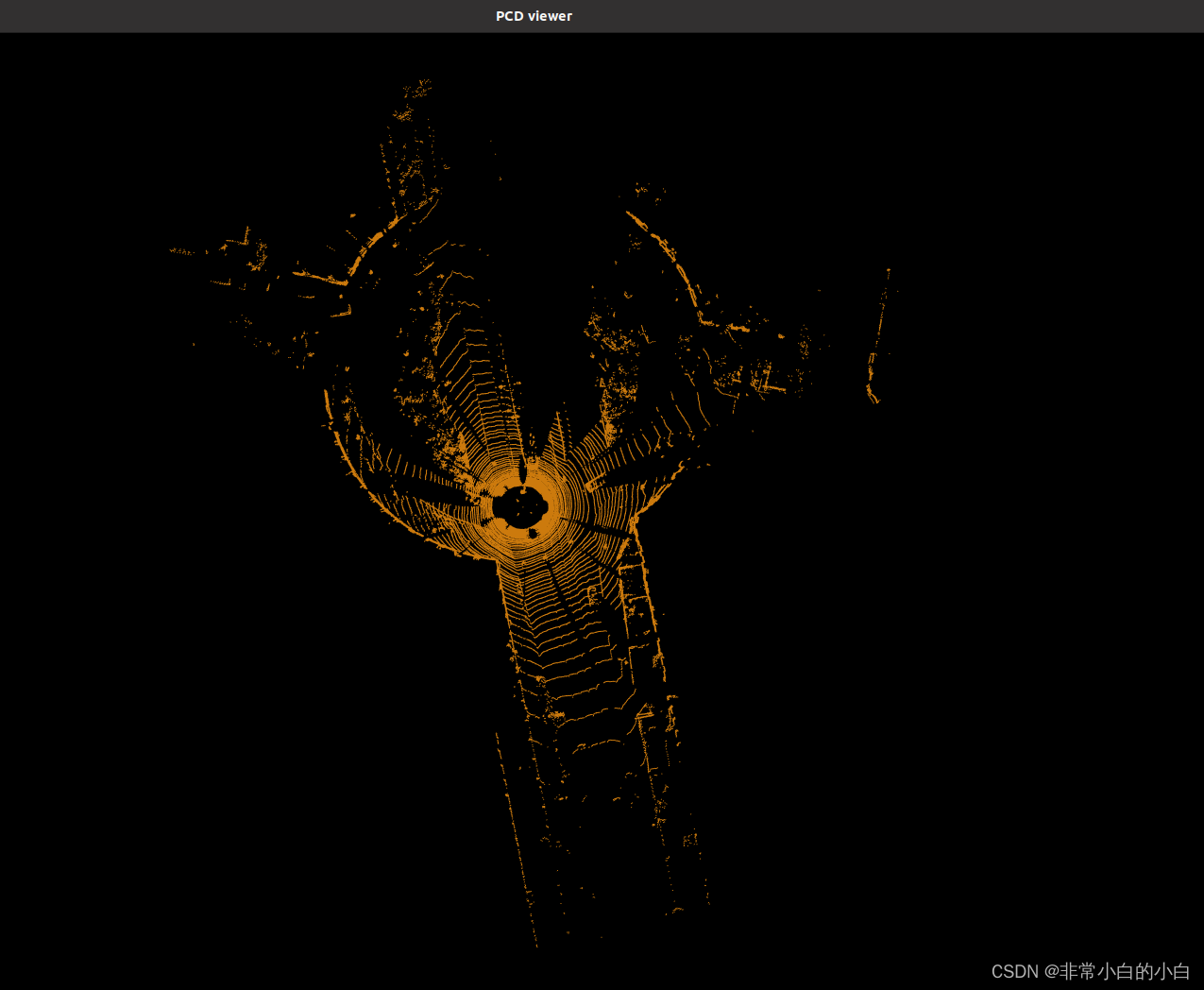
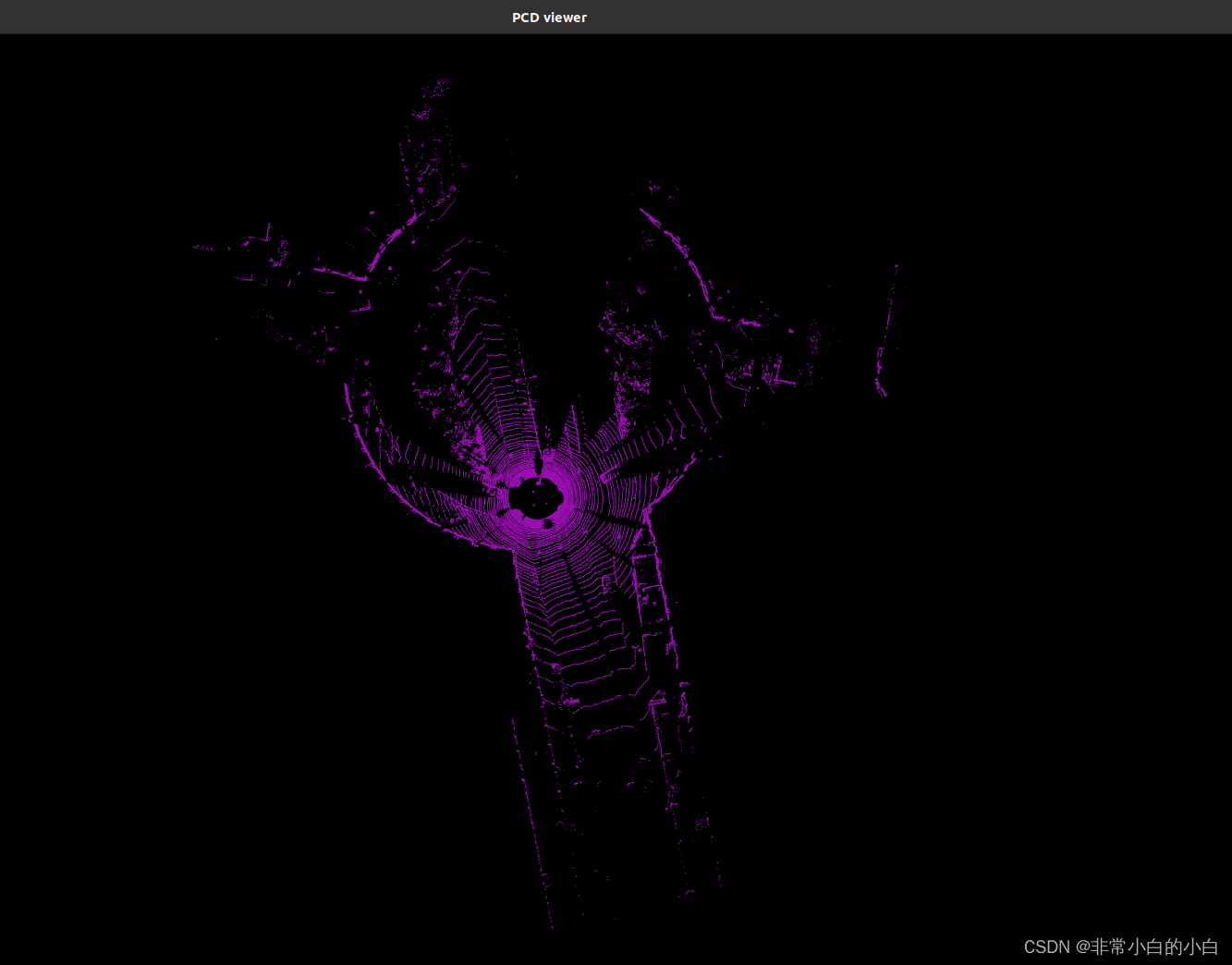
一、结果图

流程
PCL学习记录-2 Filter-2 VoxelGrid(体素网格方法-降采样)功能及用法解析_体素降采样-CSDN博客
Downsampling a PointCloud using a VoxelGrid filter — Point Cloud Library 0.0 documentation
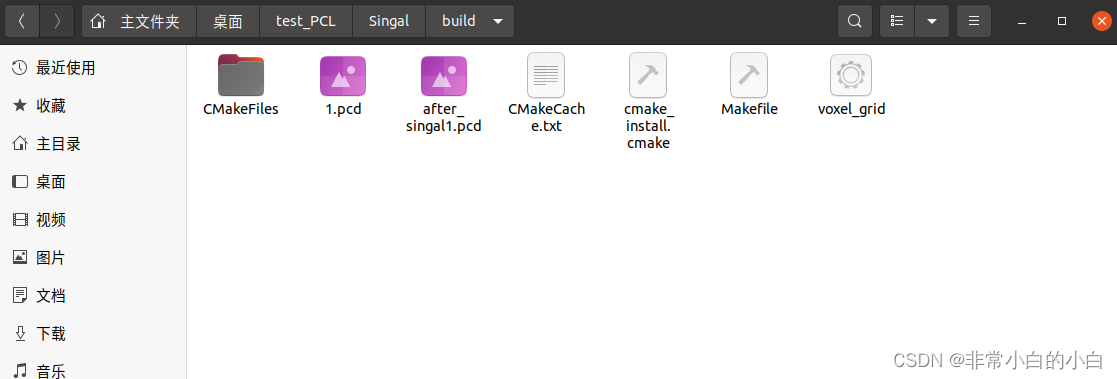
1 新建文件夹,把 voxel_grid.cpp 和CMakeLists.txt 放入
voxel_grid.cpp代码如下:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
int
main ()
{
pcl::PCLPointCloud2::Ptr cloud (new pcl::PCLPointCloud2 ());
pcl::PCLPointCloud2::Ptr cloud_filtered (new pcl::PCLPointCloud2 ());
// Fill in the cloud data
pcl::PCDReader reader;
// Replace the path below with the path where you saved your file
reader.read ("1.pcd", *cloud); // Remember to download the file first!
std::cerr << "PointCloud before filtering: " << cloud->width * cloud->height
<< " data points (" << pcl::getFieldsList (*cloud) << ")." << std::endl;
// Create the filtering object
pcl::VoxelGrid<pcl::PCLPointCloud2> sor;
sor.setInputCloud (cloud);
sor.setLeafSize (0.1f, 0.1f, 0.1f);
sor.filter (*cloud_filtered);
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height
<< " data points (" << pcl::getFieldsList (*cloud_filtered) << ")." << std::endl;
pcl::PCDWriter writer;
writer.write ("after_singal1.pcd", *cloud_filtered,
Eigen::Vector4f::Zero (), Eigen::Quaternionf::Identity (), false);
return (0);
}
CMakeLists.txt :
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(voxel_grid)
find_package(PCL 1.10 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (voxel_grid voxel_grid.cpp)
target_link_libraries (voxel_grid ${PCL_LIBRARIES})2 进行编译:
在此文件夹路径下打开终端:
mkdir build
cd build
cmake ..
make
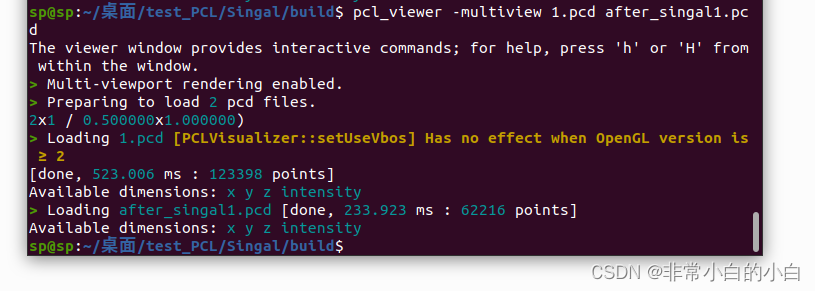
./voxel_grid3 可视化
pcl_viewer -multiview 1.pcd after_singal1.pcdpcd文件要放到build文件夹里。
注意:图片命名不一样需要更改代码。
















 8418
8418











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









