






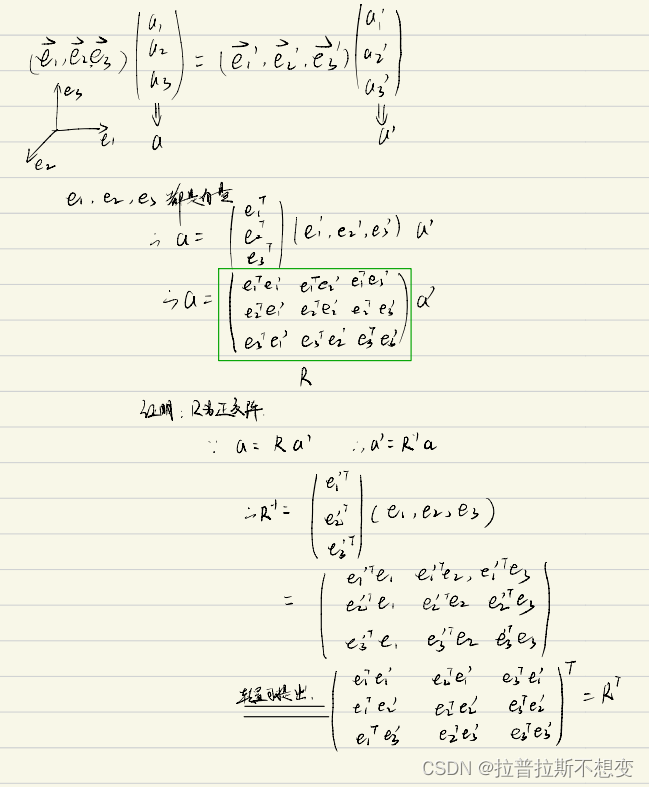
1.验证旋转矩阵是正交矩阵。
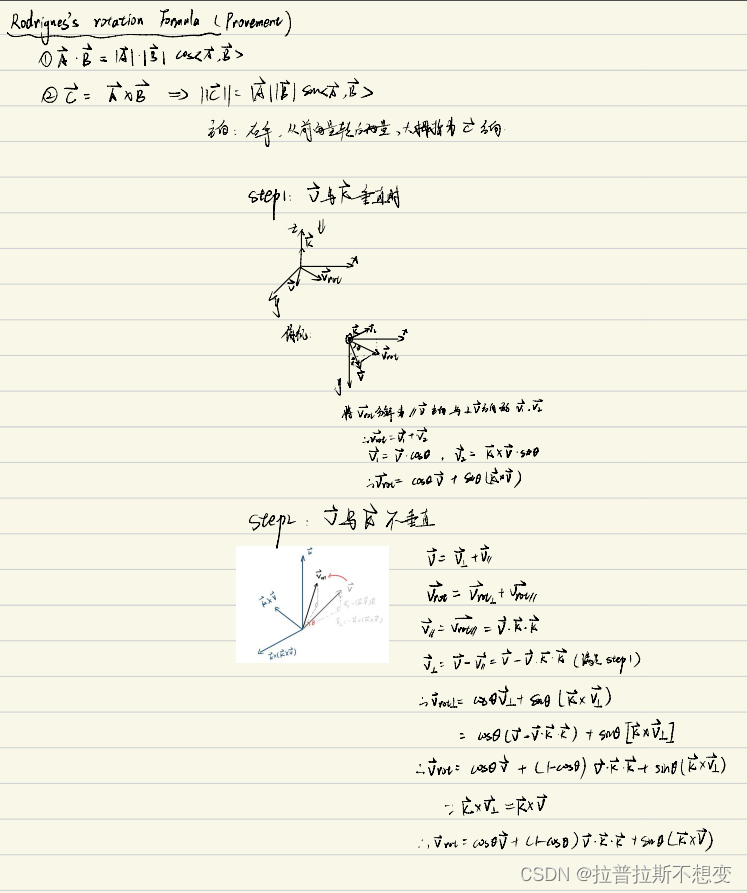
2.寻找罗德里格斯公式的推导过程并加以理解。
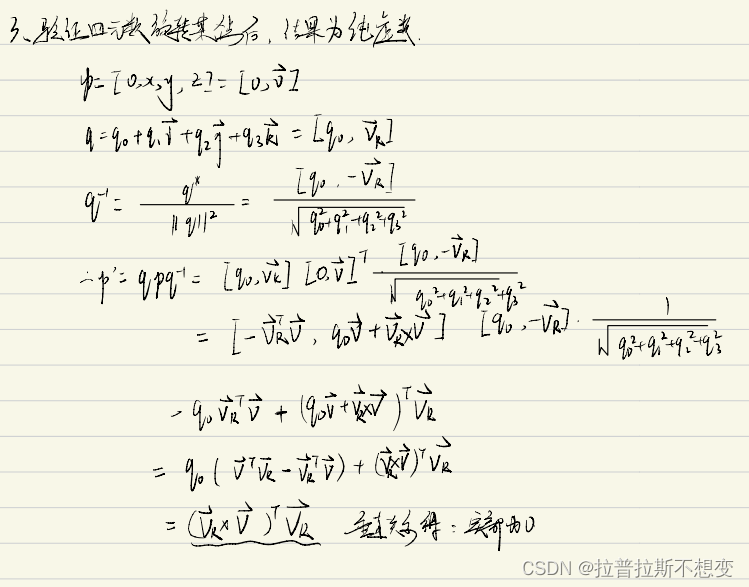
3.验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应到一个三维空间点(式 3.34)
4.画表总结旋转矩阵、轴角、欧拉角、四元数的转换关系。
四元数,旋转矩阵,轴角,欧拉角的相互转换(原理+Eigen代码实现)
5.假设有一个打的Eigen矩阵,想把它的左上角3X3的块取出来,然后赋值为I3x3 。请编程实现。
#include<iostream>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include <Eigen/Dense>
#include <ctime>
using namespace std;
#define MATRIX_SIZE 5
int main() {
//STEP1: learn to use block;
Eigen::MatrixXd matrixXd;
matrixXd = Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
cout << matrixXd << endl;
matrixXd.block<3,3>(0,0) =Eigen::Matrix3d::Identity();
cout << "------------------------------------------" << endl;
cout << matrixXd << endl;
cout << "------------------------------------------" << endl;
return 0;
}
6.一般线性方程Ax=b有几种解法?你能在Eigen中实现吗?
#include<iostream>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include <Eigen/Dense>
#include <ctime>
using namespace std;
#define MATRIX_SIZE 5
int main() {
//STEP2: solve the linear equations like Ax = b by lots of methods;
Eigen::MatrixXd matrixXd;
matrixXd = Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
cout << matrixXd << endl;
Eigen::VectorXd v_b = Eigen::VectorXd::Random(MATRIX_SIZE ,1);
// normal inverse
clock_t time = clock();
Eigen::VectorXd x = matrixXd.inverse() * v_b;
cout << "out of normal inverse is " << x.transpose() << endl;
cout <<"time use in normal inverse is " << 1000* (clock() - time)/(double)CLOCKS_PER_SEC << "ms"<< endl;
// QR composition
time = clock();
x = matrixXd.colPivHouseholderQr().solve(v_b);
cout << "out of QR composition is " << x.transpose() << endl;
cout <<"time use in QR composition is " << 1000* (clock() - time)/(double)CLOCKS_PER_SEC << "ms"<< endl;
// least-squares solution
time = clock();
x = matrixXd.bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(v_b);
cout << "out of least-squares solution is: " << x.transpose() << endl;
cout <<"time use in least-squares solution is " << 1000* (clock() - time)/(double)CLOCKS_PER_SEC << "ms"<< endl;
// cholesky composition (positive definite matrix)
time = clock();
x = matrixXd.ldlt().solve(v_b);
cout << "out of cholesky composition is " << x.transpose() << endl;
cout <<"time use in cholesky composition is " << 1000* (clock() - time)/(double)CLOCKS_PER_SEC << "ms"<< endl;
return 0;
}
7.
#include<iostream>
#include<Eigen/Core>
#include<Eigen/Geometry>
using namespace std;
int main() {
Eigen::Quaterniond q1 = {0.35,0.2,0.3,0.1};
q1.normalize(); //归一化
Eigen::Isometry3d Tcw1=Eigen::Isometry3d::Identity();
Tcw1.rotate(q1);
Tcw1.pretranslate(Eigen::Vector3d(0.3,0.1,0.1));
Eigen::Vector3d pc (0.5,0,0.2);
Eigen::Vector3d pw = Tcw1.inverse() * pc; // pw = Twc * pc
Eigen::Quaterniond q2 = {-0.5,0.4,-0.1,0.2};
q2.normalize(); //归一化
Eigen::Isometry3d Tcw2=Eigen::Isometry3d::Identity();
Tcw2.rotate(q2);
Tcw2.pretranslate(Eigen::Vector3d(-0.1,0.5,0.3));
Eigen::Vector3d p = Tcw2 * pw;
cout << "The coordinates of p :" << p.transpose() << endl;
return 0;
}














 491
491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









