






 文章介绍了线性代数的基本概念,包括矩阵求解规则,以及C++中的类和STL库。还提到了C++11新特性,以及Linux操作系统中的目录结构及其功能。最后展示了使用`sudoaptinstall`进行包管理的例子。
文章介绍了线性代数的基本概念,包括矩阵求解规则,以及C++中的类和STL库。还提到了C++11新特性,以及Linux操作系统中的目录结构及其功能。最后展示了使用`sudoaptinstall`进行包管理的例子。
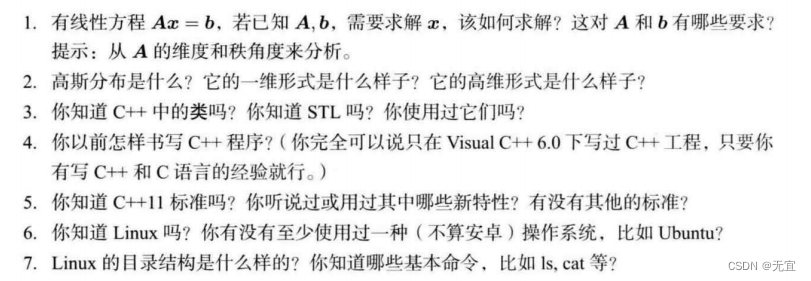
习题:
 解答:
解答:
1、线性代数内容,已知矩阵A与值b,可以采用增广矩阵进行求解即A/b,化简后利用(0,0,1)等来计算出x。如果A满秩,则有唯一解;当A不等于A/b的秩,则无解;其余情况有无数解,具体问题具体分析。
2、高斯分布就是正态分布。
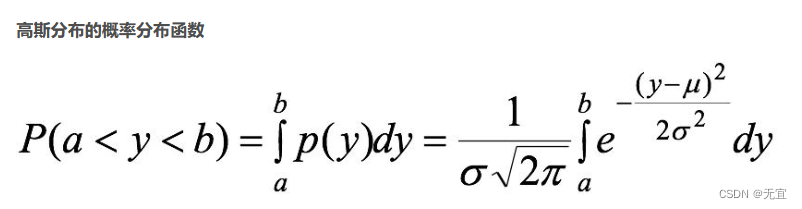
其中exp函数指的是e指数函数
本文链接:https://blog.csdn.net/qq_37692302/article/details/91645379
————————————————
3、
- C++中的类是一种用户自定义的数据类型,用于封装数据和函数。类定义了数据的结构和行为,并可以实例化对象来访问这些数据和函数。以下是一个简单的C++类的示例:
```cpp
#include <iostream>
using namespace std;
class Person {
private:
string name;
int age;
public:
void setName(string n) {
name = n;
}
void setAge(int a) {
age = a;
}
void display() {
cout << "Name: " << name << endl;
cout << "Age: " << age << endl;
}
};
int main() {
Person p;
p.setName("Alice");
p.setAge(25);
p.display();
return 0;
}
```
在这个例子中,我们定义了一个名为Person的类,它具有私有成员变量name和age,以及公有方法setName、setAge和display来设置和显示对象的属性。在main函数中,我们实例化了一个Person对象p,并设置了其属性,并通过调用display方法来展示对象的属性。
- STL是Standard Template Library(标准模板库)的缩写,它是C++标准库的一部分,提供了一系列通用模板类和函数,用于实现常见的数据结构和算法。STL包括容器(如vector、list、map等)、算法(如sort、find、for_each等)和迭代器等组件,为C++程序员提供了丰富且高效的工具,可以简化代码编写并提高开发效率。
- 使用过类似的
4、VS用过,DECV++用过等
5、
C++11标准是C++编程语言的一个重要版本,它于2011年发布。C++11引入了许多新的特性和改进,使得C++语言更加现代化和强大。一些C++11标准的特性包括:
1. 自动类型推断(auto关键字)
2. Lambda表达式
3. 右值引用和移动语义
4. 初始化列表
5. 面向并发的多线程支持(std::thread, std::mutex等)
6. 强大的智能指针(std::shared_ptr, std::unique_ptr等)
7. 新的容器类型(std::array, std::unordered_set等)
8. 新的语言特性,如nullptr, static_assert等
6、用过一次
7、
Linux操作系统中的目录结构是按照一定的规范组织的,常见的目录及其作用如下:
1. **/(根目录)**:整个文件系统的起点,包含所有文件和目录。
2. **/bin(二进制文件)**:系统用户可执行的二进制文件,如ls、cp等命令。
3. **/boot(启动文件)**:系统引导需要的文件,如内核文件和引导加载程序。
4. **/dev(设备文件)**:系统中的设备文件,包括硬盘、USB等设备。
5. **/etc(配置文件)**:系统配置文件存放的目录,如网络配置、用户配置等。
6. **/home(用户家目录)**:普通用户的家目录,一般为/home/用户名。
7. **/lib(库文件)**:系统运行时需要的共享库文件。
8. **/media(挂载点)**:可移动设备挂载的目录,如U盘、光盘等。
9. **/mnt(挂载点)**:临时挂载目录,可以手动挂载其他文件系统。
10. **/opt(可选软件包)**:可选的软件包安装目录。
11. **/proc(进程信息)**:系统内存信息、进程信息等虚拟文件系统。
12. **/root(超级用户家目录)**:超级用户root的家目录。
13. **/sbin(系统二进制文件)**:系统管理员使用的系统管理命令。
14. **/tmp(临时文件)**:存放临时文件的目录,重启后会被清空。
15. **/usr(用户程序)**:用户程序和文件存放的目录,类似于Windows的Program Files。
16. **/var(可变数据)**:包含经常变化的文件,如日志文件、邮件等。
这些是Linux系统中常见的目录结构,不同的Linux发行版可能会有些许差异,但大体上遵循这样的组织结构。
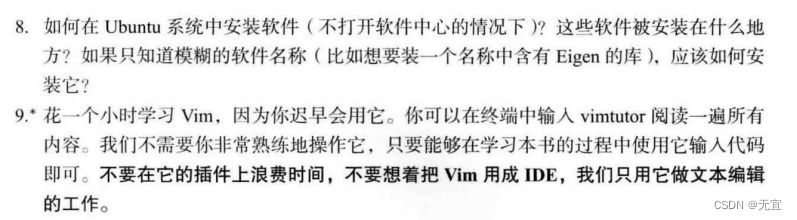
8、sudo apt install ...
9、sudo apt install vim















 3857
3857











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









