






本文为《视觉SLAM十四讲》(第二版)的课后习题解答,为本人学习时参考着网上的资源所写的答案,可能有所纰漏,希望大家指出。
第1讲 预备知识
- 有线性方程 Ax = b,当我们知道 A, b,想要求解 x 时,如何求解?这对 A 和 b 需 要哪些条件?提示:从 A 的维度和秩角度来分析。
1.若b≠0,则
当r=m=n时,整个方程存在唯一解;
当r=n<m,即A列满秩,整个方程要么无解要么存在唯一解;
当r=m<n,即A行满秩,整个方程有无穷解;
当r<m,r<n,整个方程要么无解要么存在唯一解。
2.若b=0,则
当r=n时,整个方程只有解x=0;
当r<n,整个方程有无穷解; - 高斯分布是什么?它的一维形式是什么样子?它的高维形式是什么样子?
答:高斯分布又称正态分布,一维形式为概率密度函数…
第2讲 初始SLAM
第3讲 三维空间刚体运动
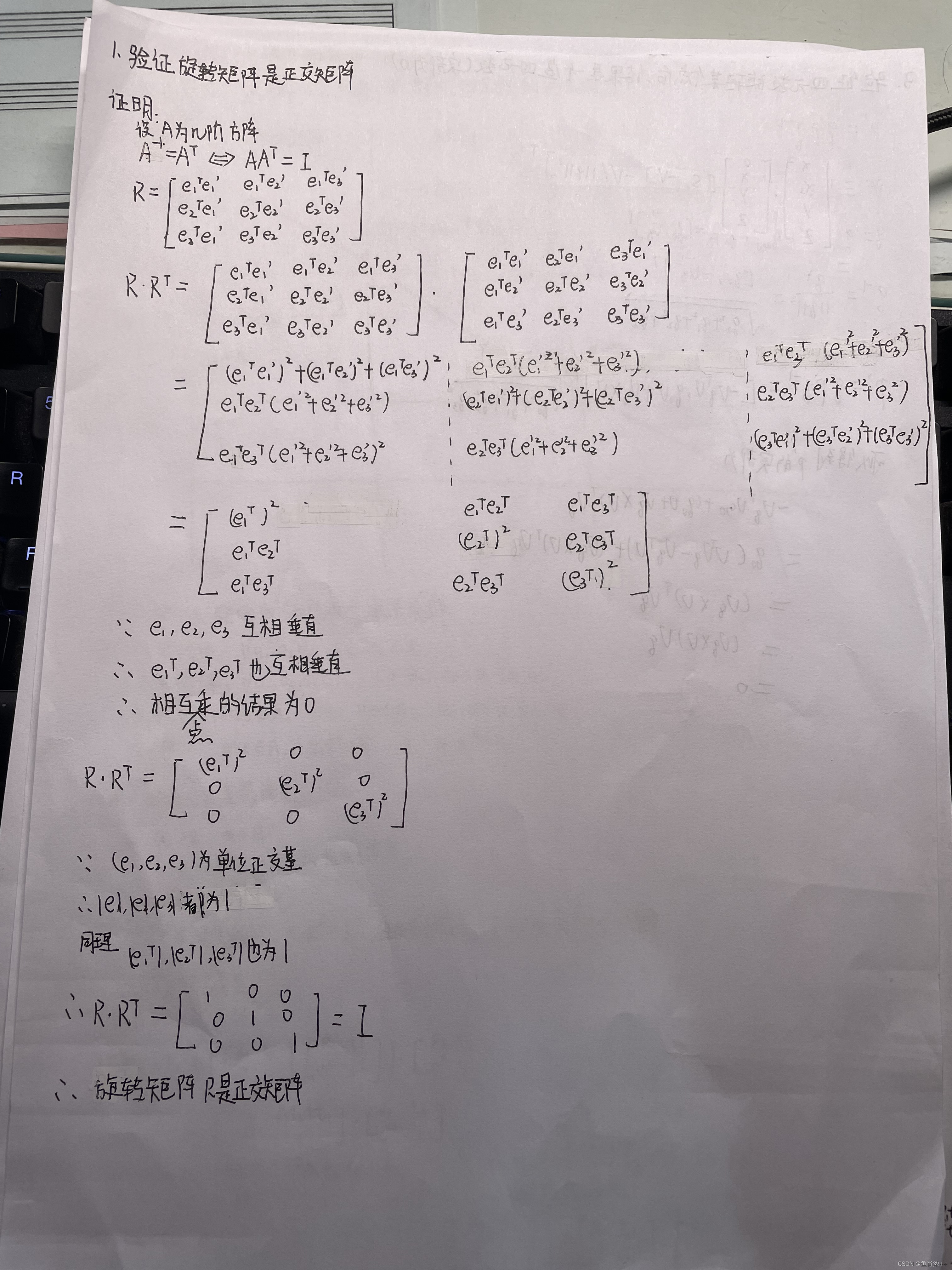
- 验证旋转矩阵是正交矩阵。
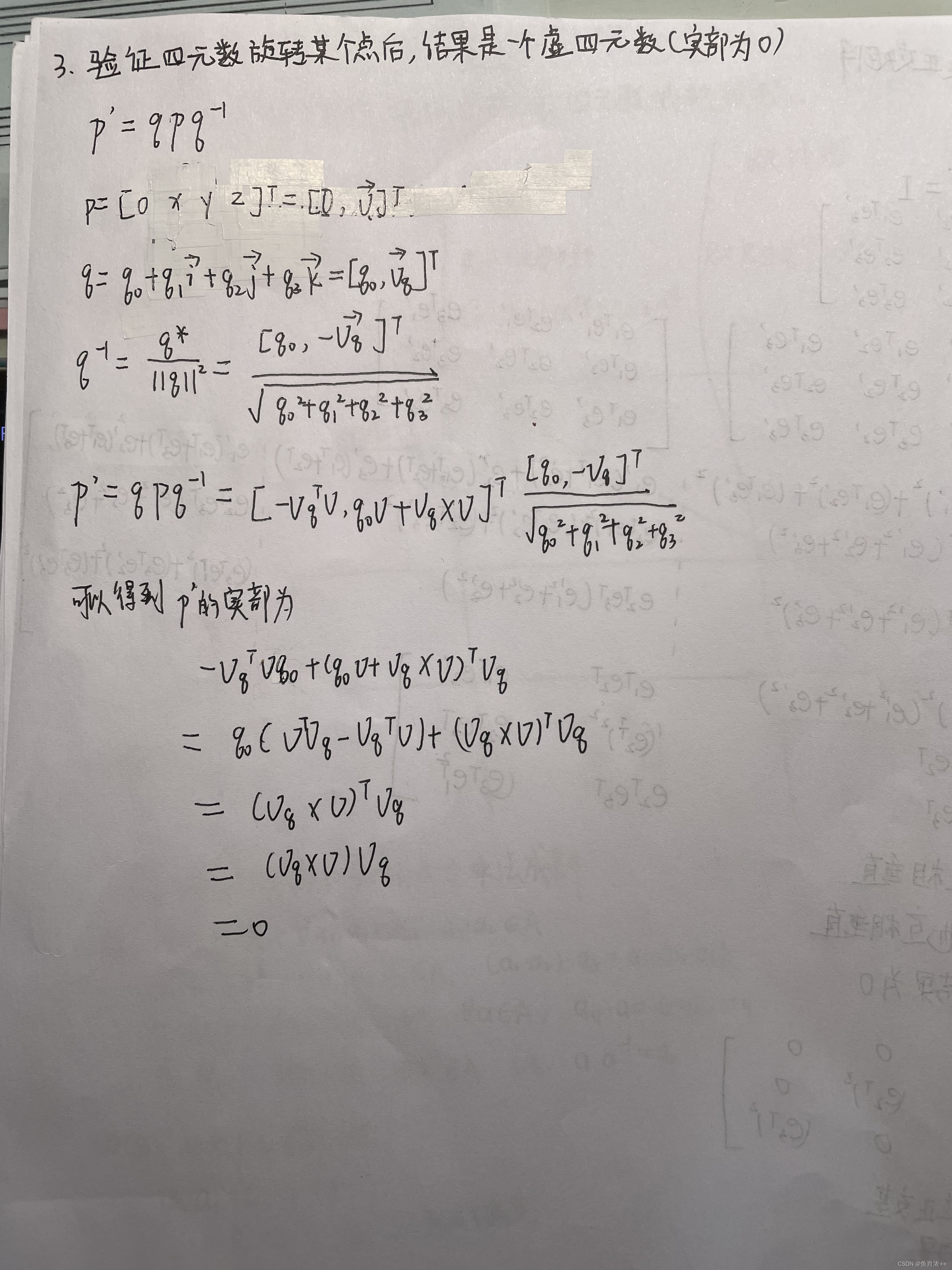
- 验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应到一个三维空间点(式 3.34)
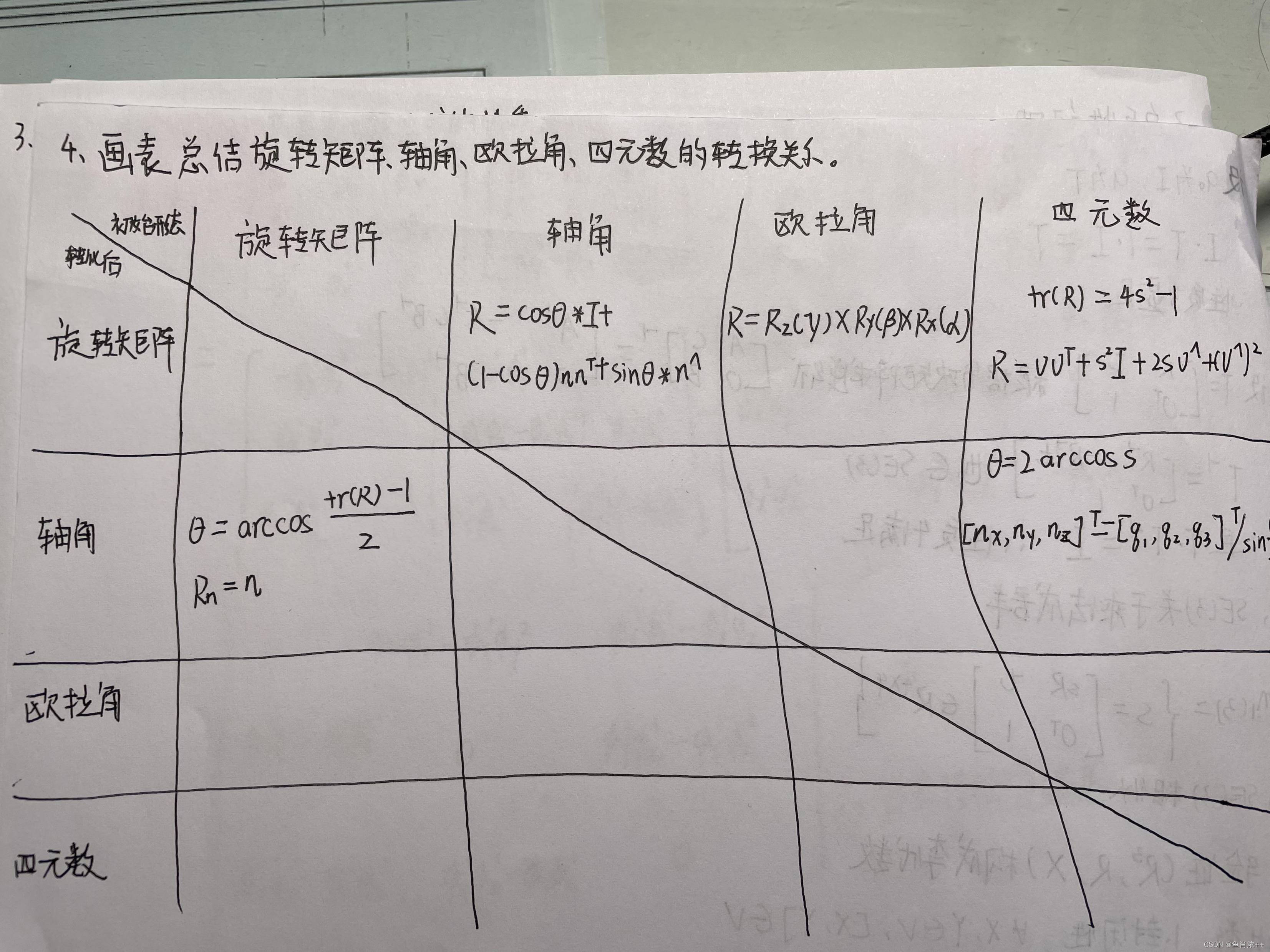
- 画表总结旋转矩阵、轴角、欧拉角、四元数的转换关系。
第4讲 李群与李代数
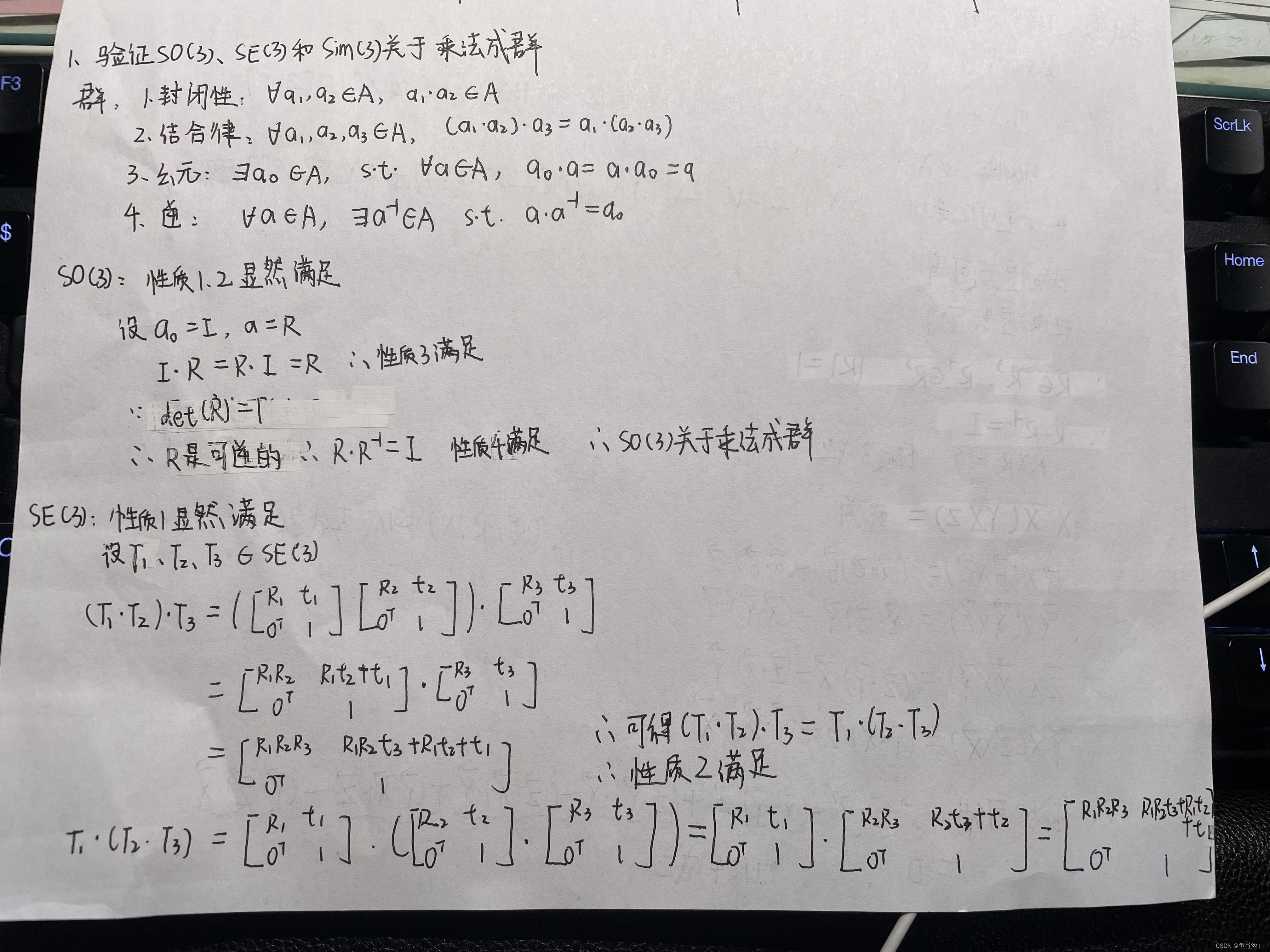
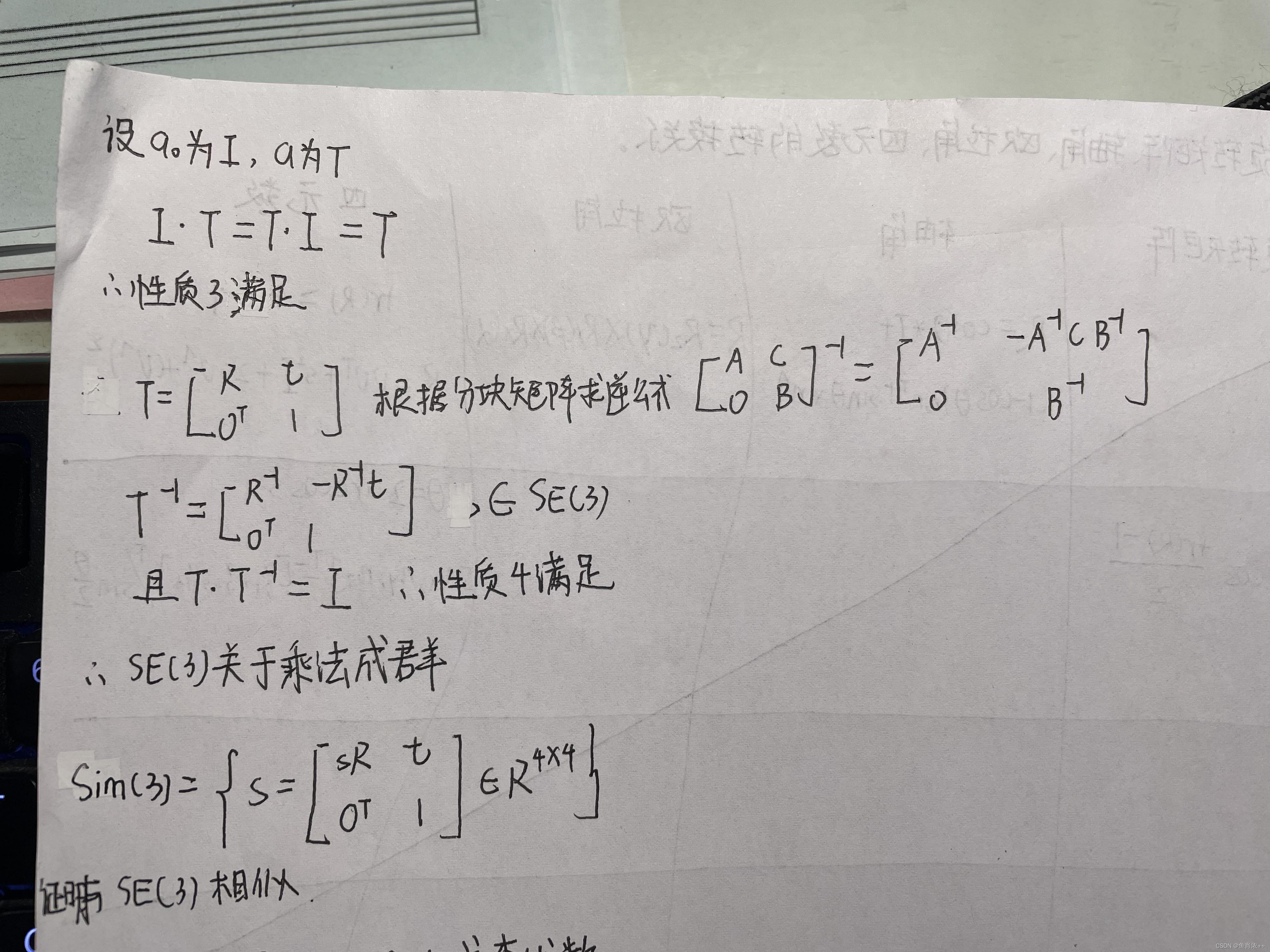
1.验证SO(3),SE(3)和Sim(3)关于乘法成群
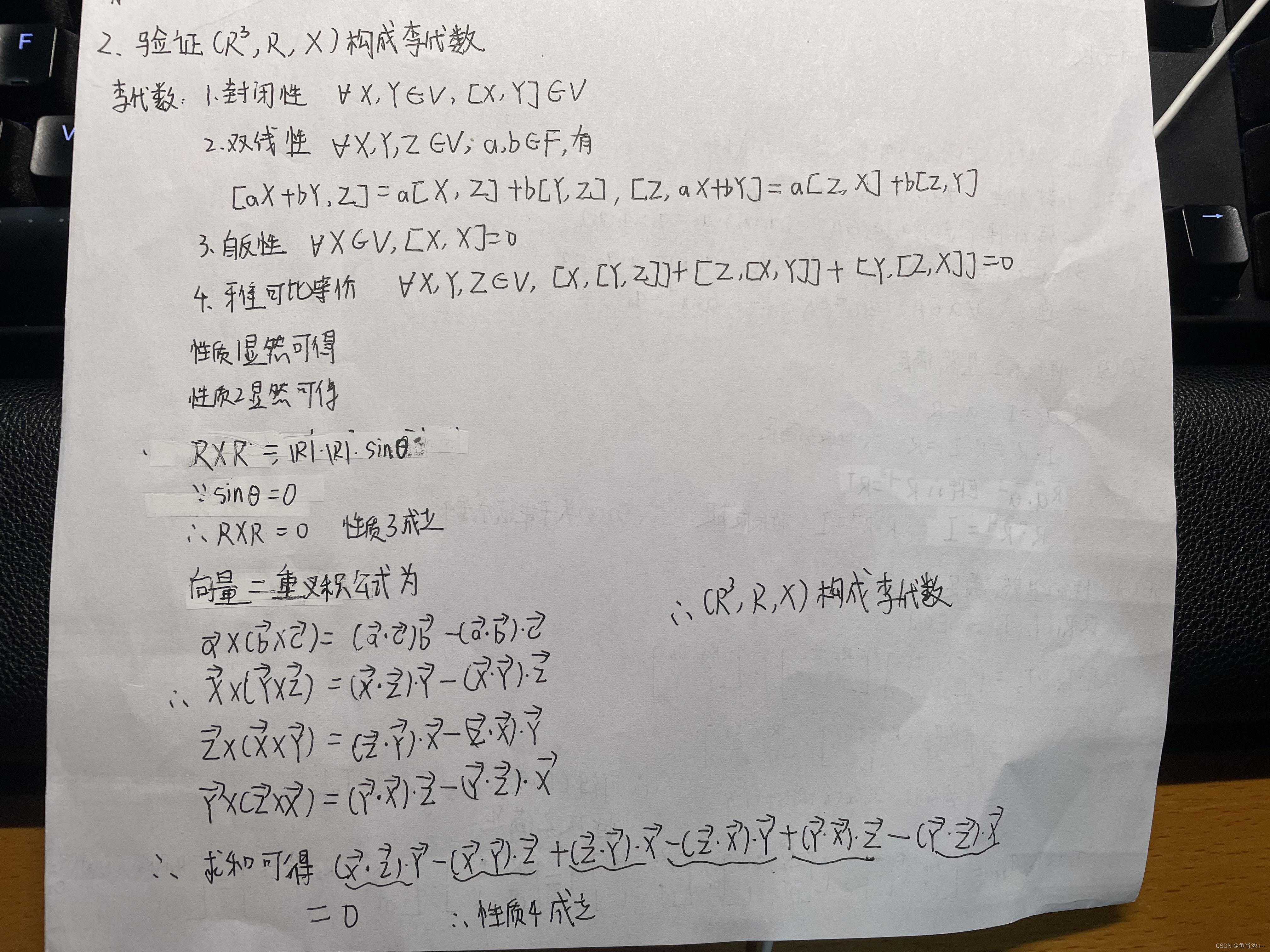
2.验证(R^3,R,X)构成李代数
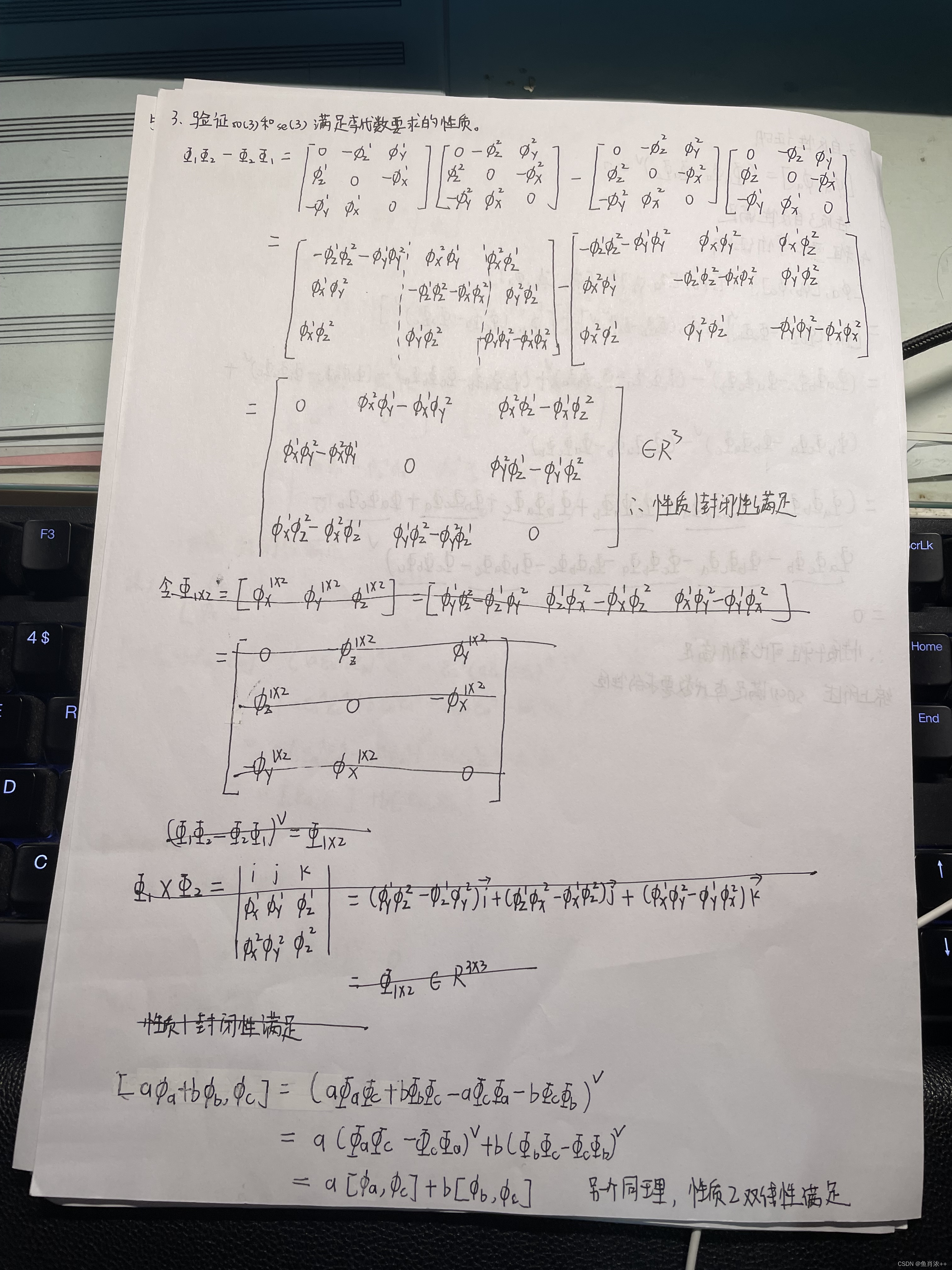
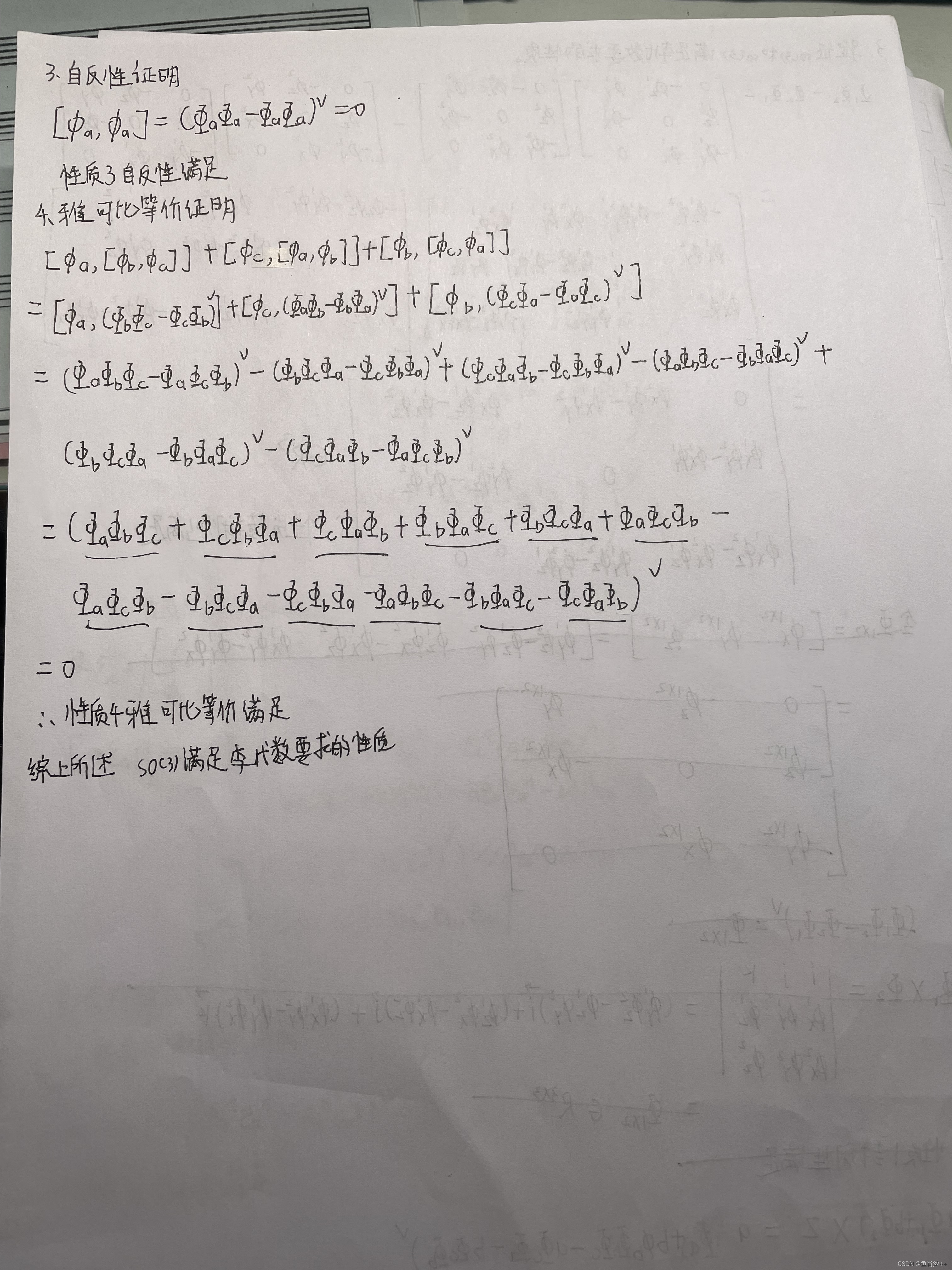
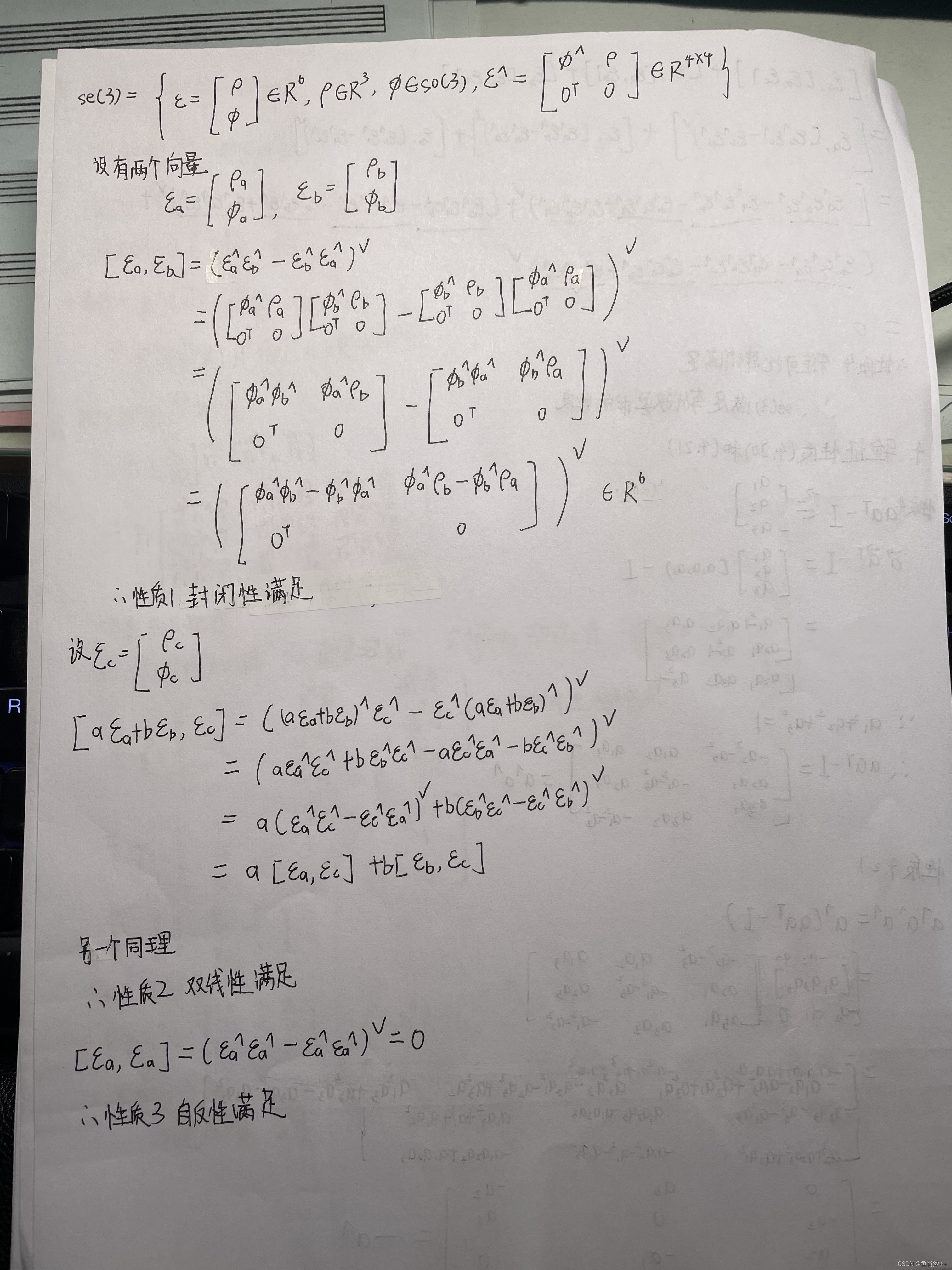
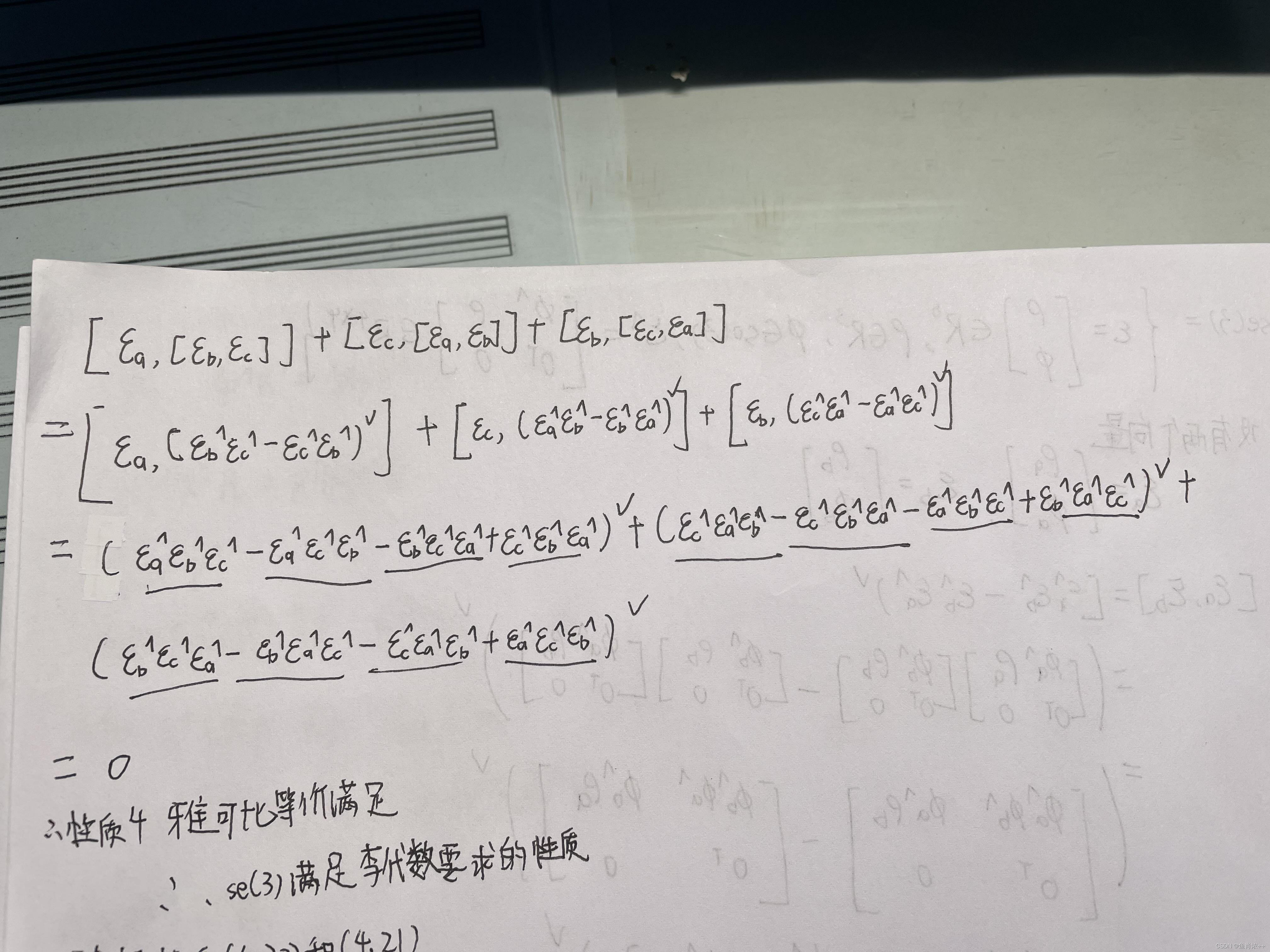
3.验证so(3)和se(3)(李代数)满足李代数要求的性质
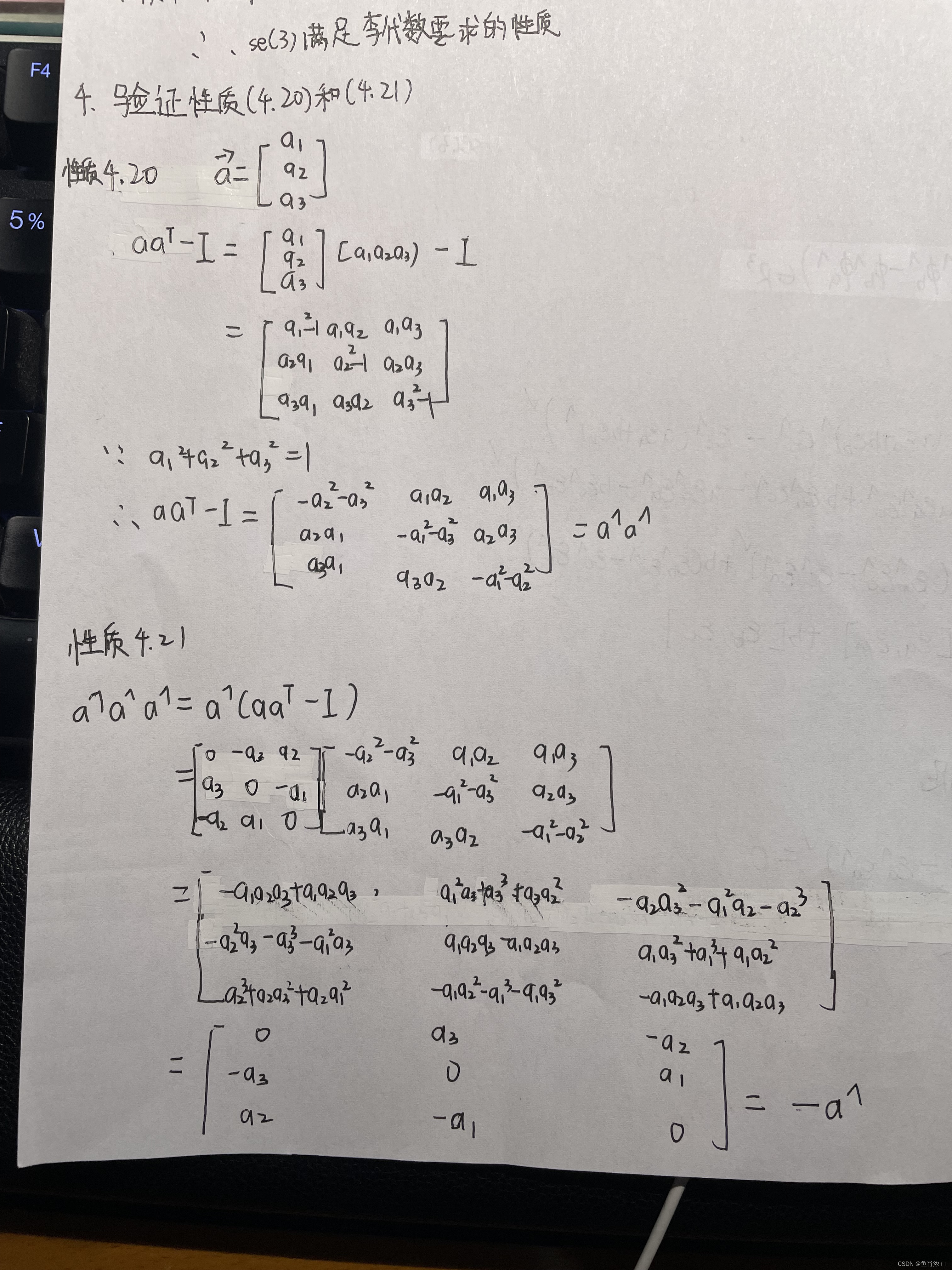
4.验证性质(4.20)和(4.21)
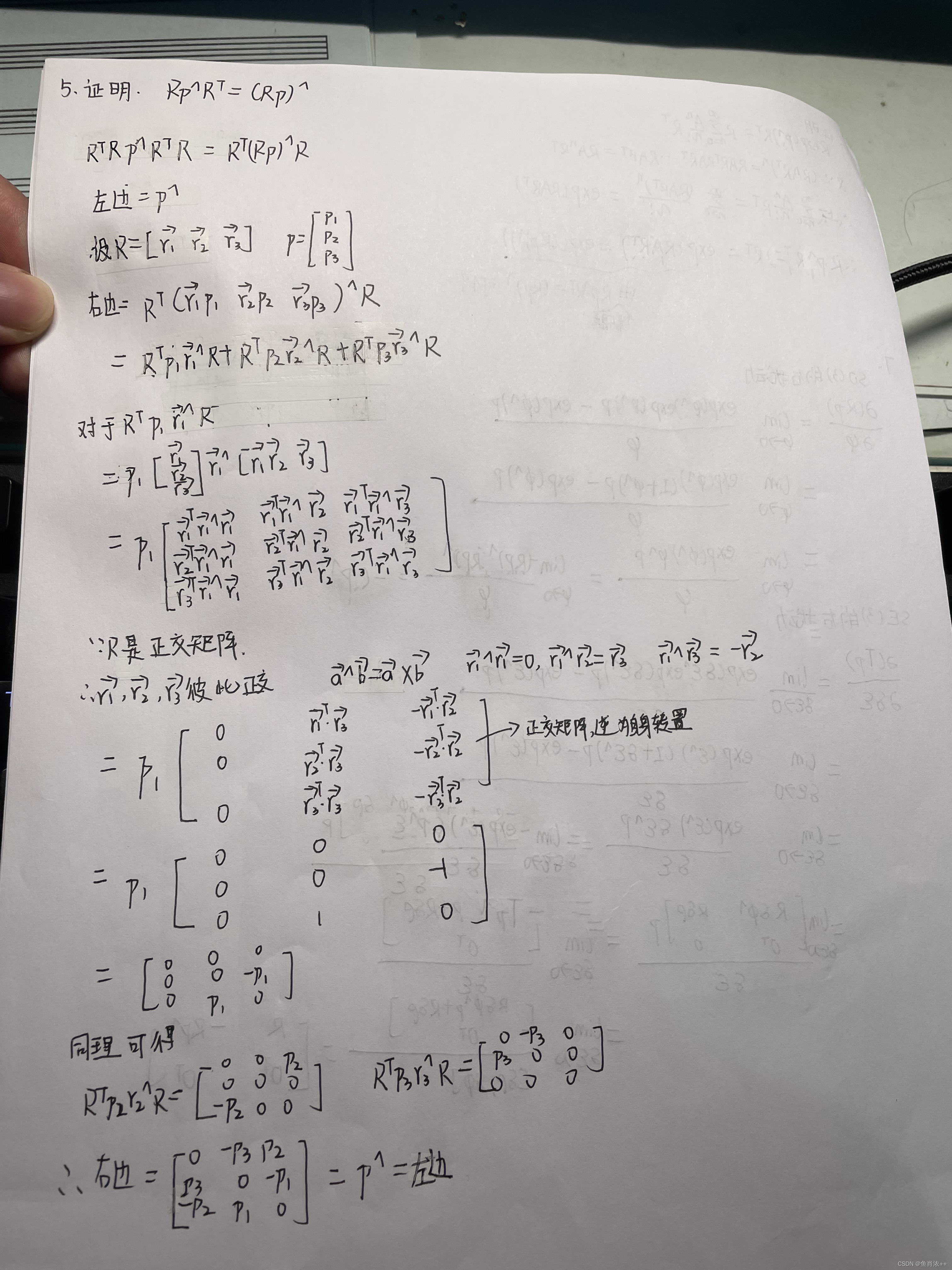
5.证明
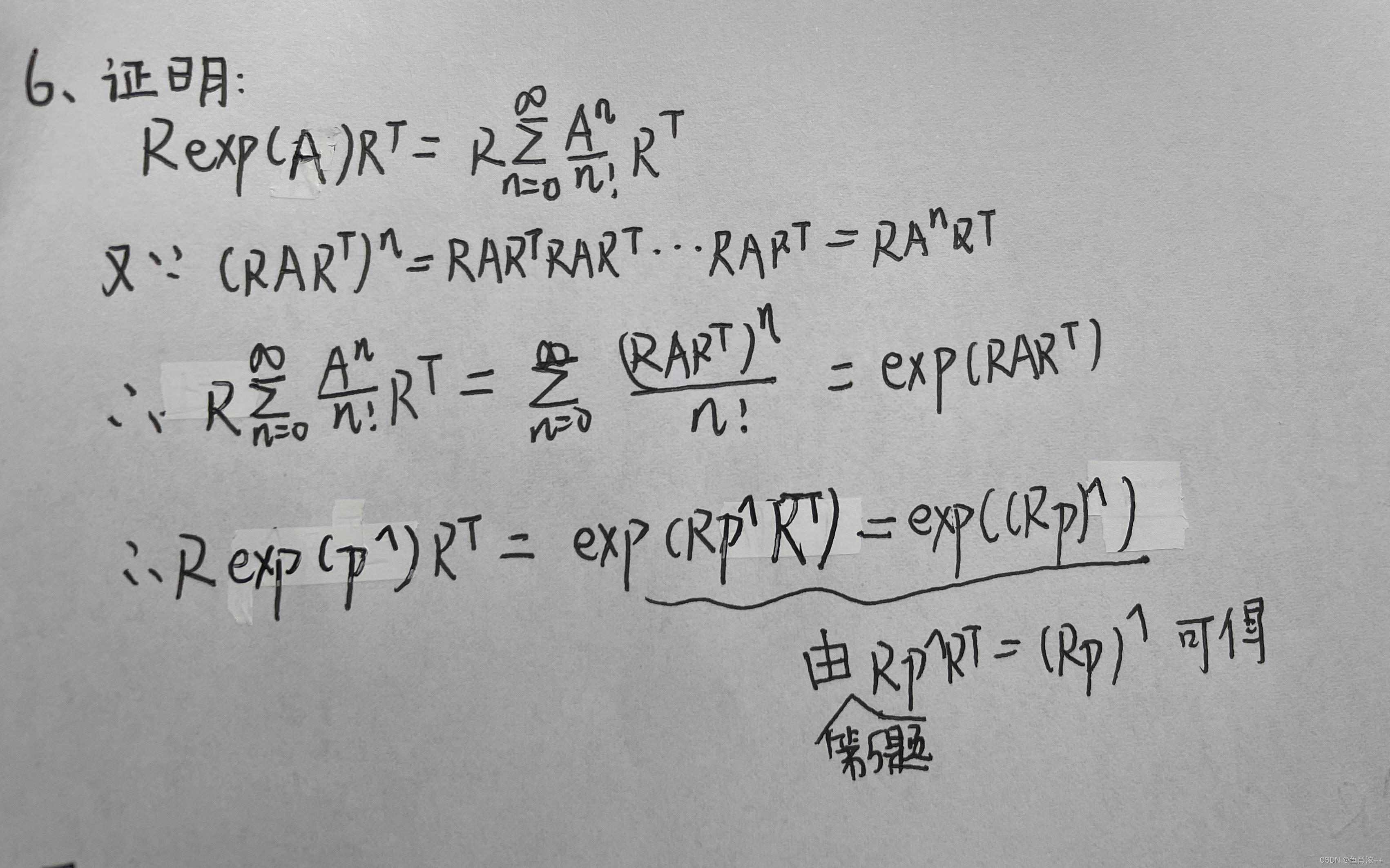
6.证明
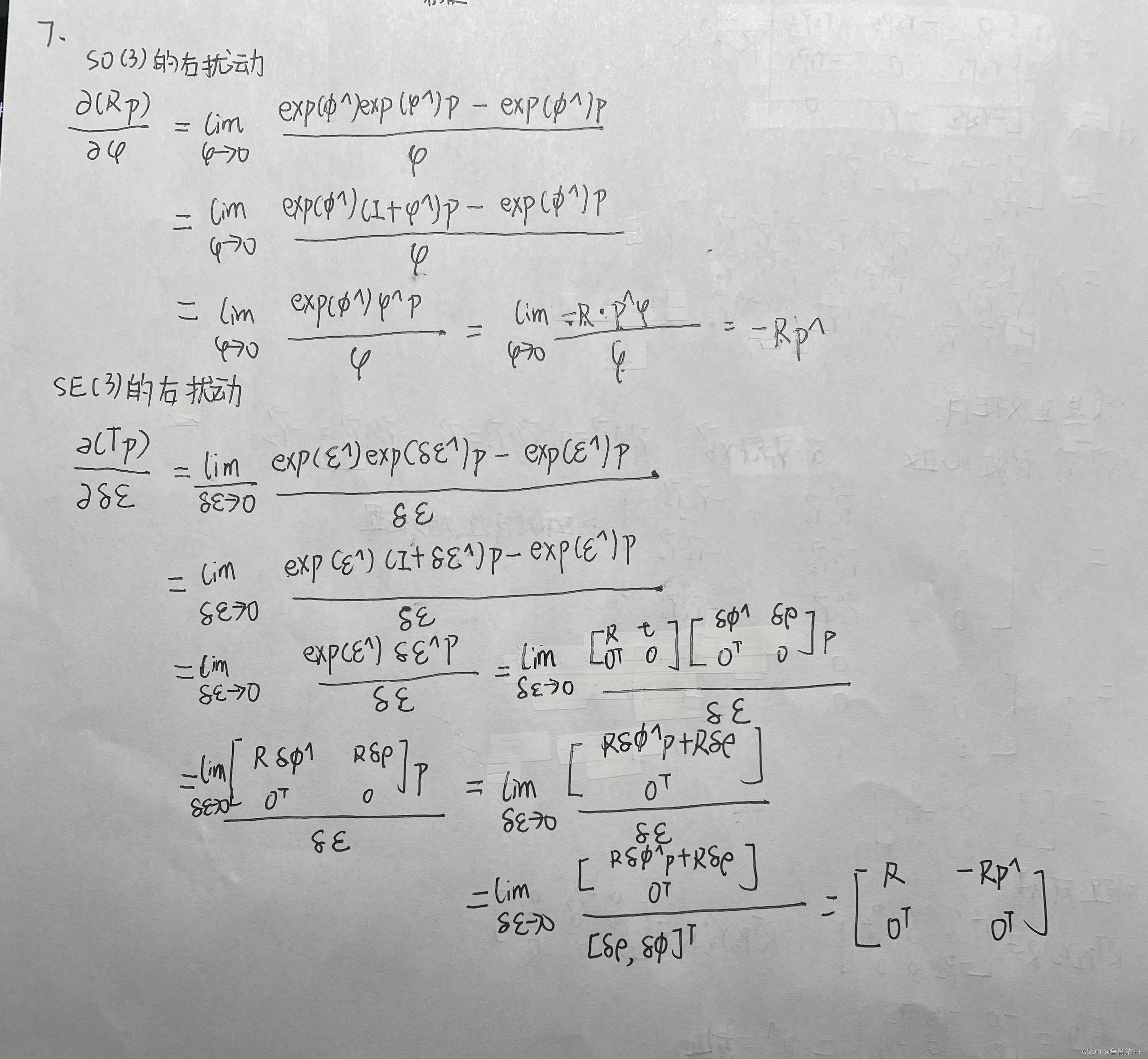
7 仿照左扰动的推导,推导SO(3)和SE(3)在右扰动下的导数。
第5讲 相机与图像
第6讲 非线性优化
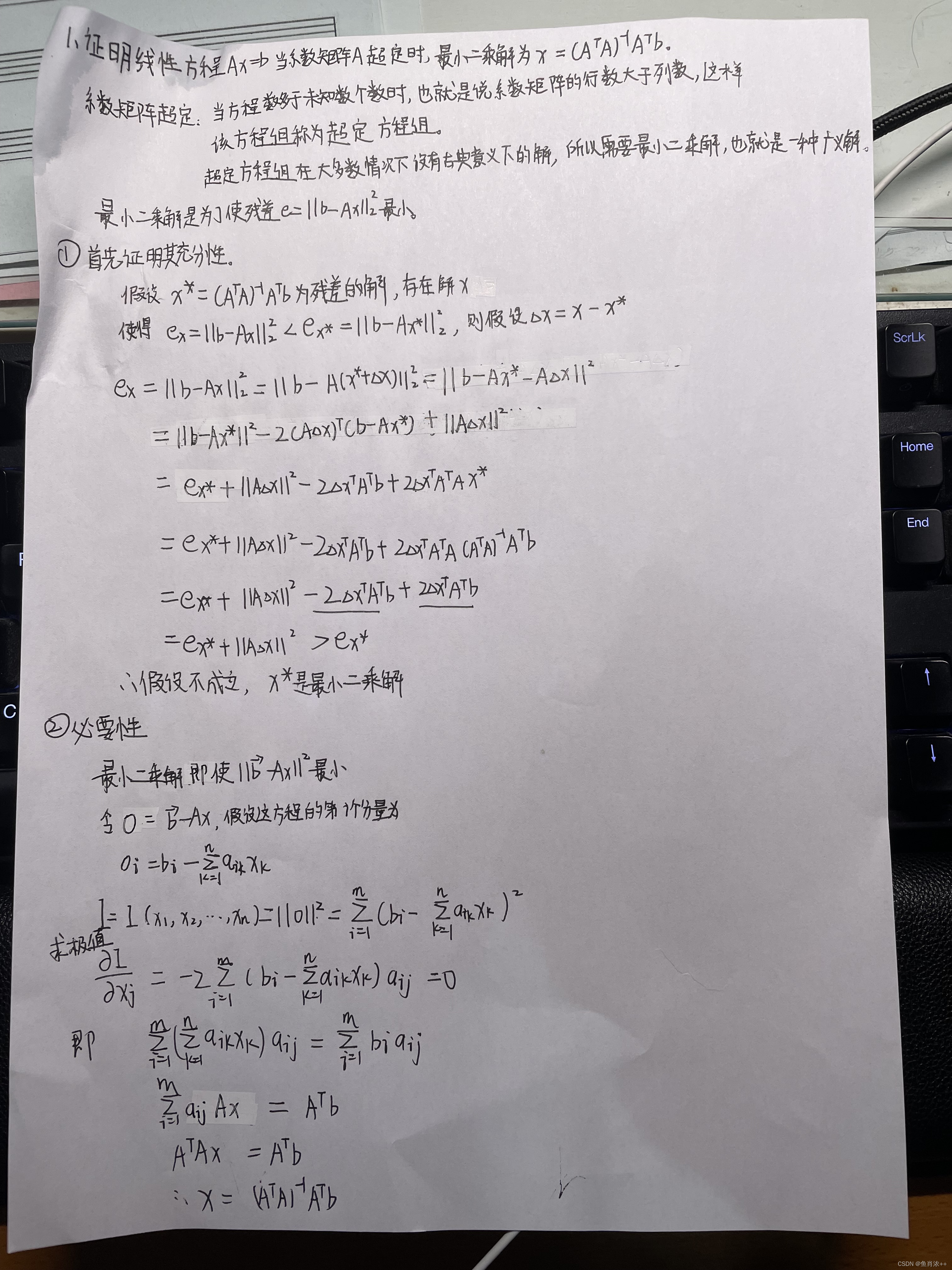
- 证明线性方程Ax = b 当系数矩阵A 超定时,最小二乘解为

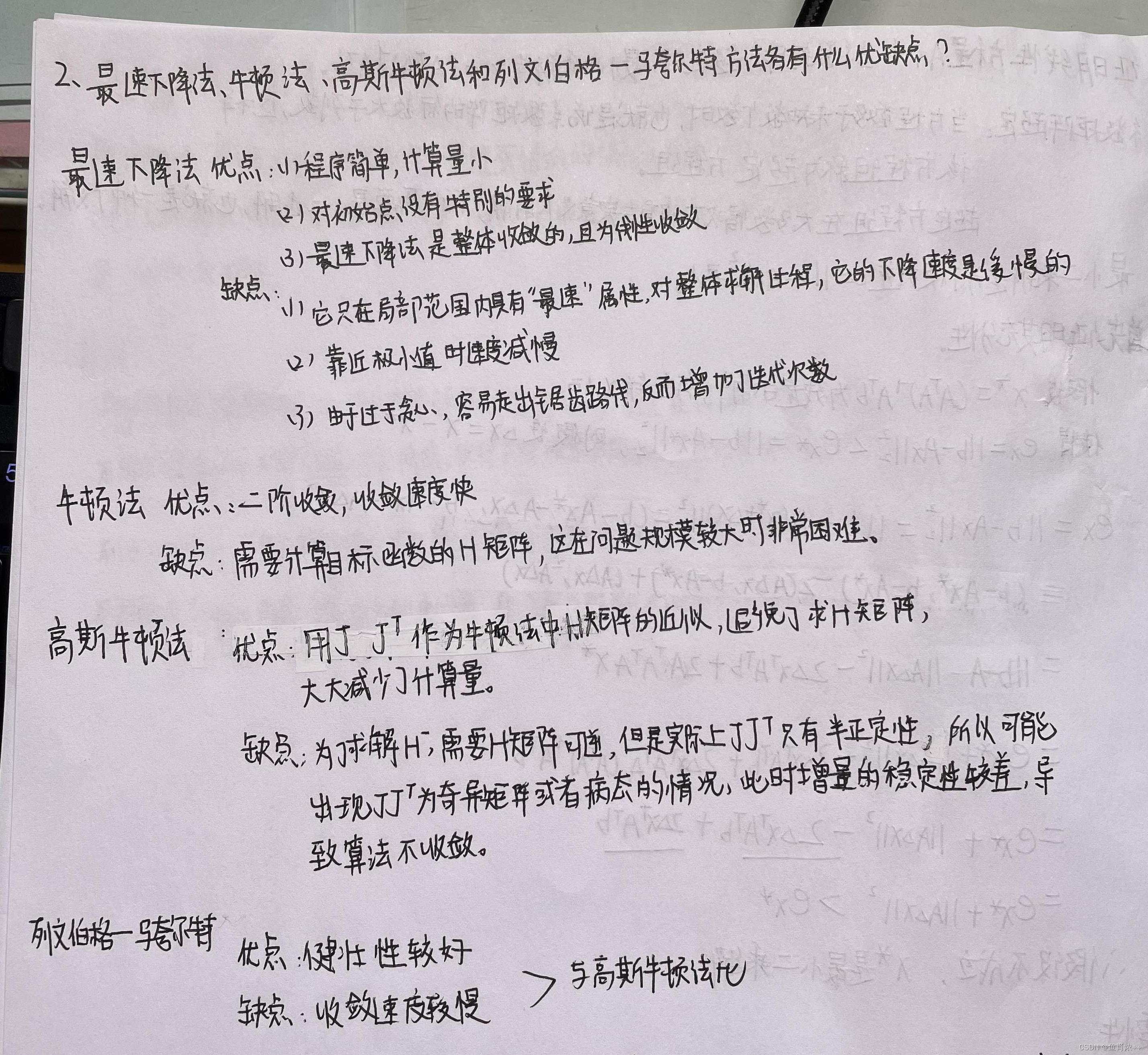
- 调研最速下降法、牛顿法、高斯牛顿法和列文伯格-马夸尔特方法各有什么优缺点?除了我们举例的Ceres库和g2o库,还有哪些常用的优化库?
- 为什么高斯牛顿法的增量方程系数矩阵可能不正定?不正定有什么几何含义?为什么在这种情况下解就不稳定了?
5. DogLeg是什么?它与高斯牛顿法和列文伯格-马夸尔特方法有什么异同?
第7 讲 非线性优化
-
除了本书介绍的ORB特征点,你还能找到哪些特征点?请说说SIFT或SURF的原理,并对比它们与ORB之间的优劣。
-
设计程序调用OpenCV中的其他种类特征点,统计在提取1000个特征点时在你的机器上所用的时间。
-
我们发现,OpenCV提供的ORB特征点在图像中分布不够均匀。你是否能够找到或提出让特征点分布更均匀的方法?
-
研究FLANN为何能够快速处理匹配问题,除了FLANN,还有哪些可以加速匹配的手段?
-
把演示程序使用的EPnP改成其他PnP方法,并研究它们的工作原理。
-
在PnP优化中,将第一个相机的观测也考虑进来,程序应如何书写?最后结果会有何变化?
-
在ICP程序中,将空间点也作为优化变量考虑进来,程序应如何书写?最后结果会有何变化?
-
在特征点匹配过程中,不可避免地会遇到误匹配的情况。如果我们把错误匹配输入到PnP或ICP中,会发生怎样的情况?你能想到哪些避免误匹配的方法?
-
使用Sophus的SE3类,自己设计g2o的节点和边,实现PnP和ICP的优化。
-
在Ceres中实现PnP和ICP的优化。

















 1759
1759

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









