









在codesys中我们需要通过Device设备添加设备库中存在的第三方轴和驱动器,添加后需要对轴的PDO和SDO进行相关设置,其中PDO是PLC与总线型伺服驱动器在EtherCAT总线下进行实时交换的数据,这些数据主要是控制伺服的控制字和目标速度、目标扭矩、驱动器IO输出点信号等
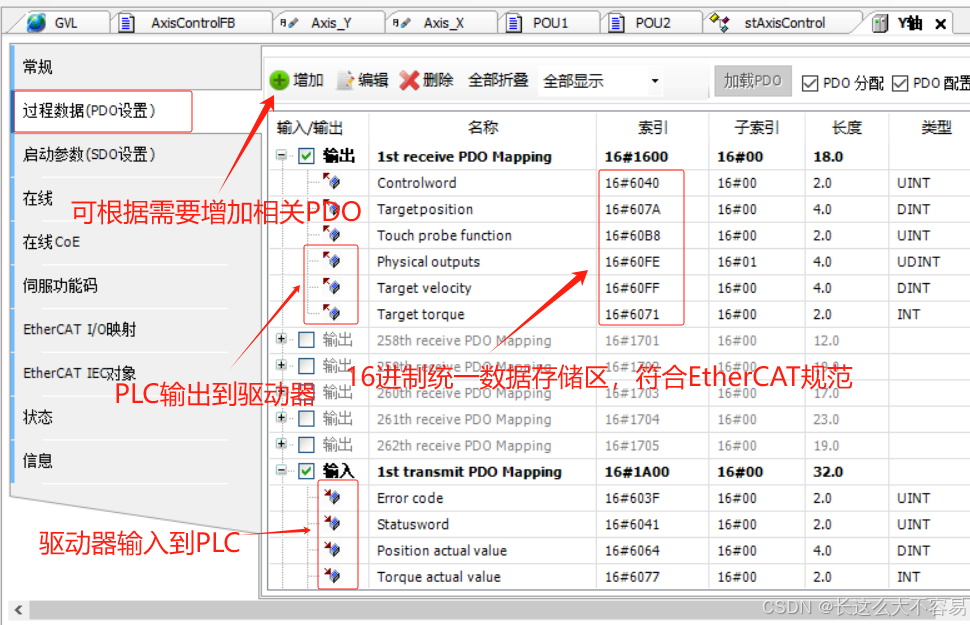
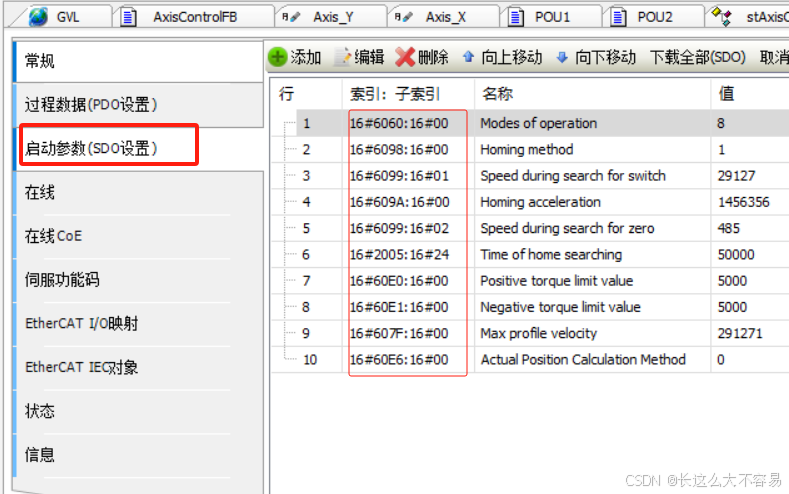
而SDO是PLC在与驱动器第一次通信成功后需要输入给驱动器的参数,主要是操作模式、回零方式等,让轴以某种模式进行运动(位置、速度、转矩),正负限位,可根据需要进行设置。SDO不需要和PLC进行非常快速的数据交互,对实时性要求不高。
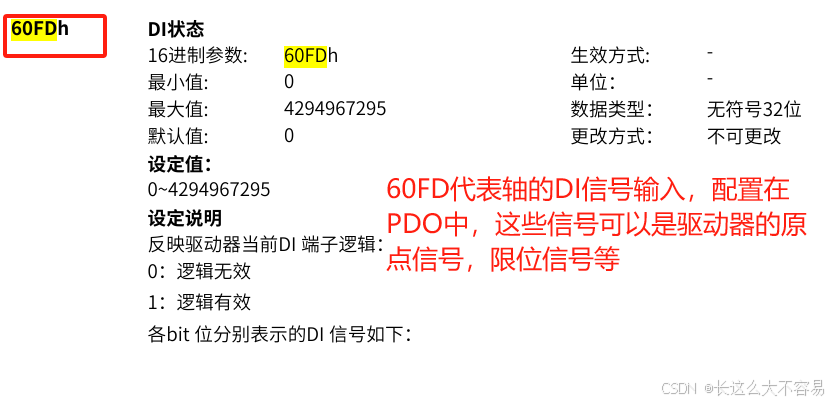
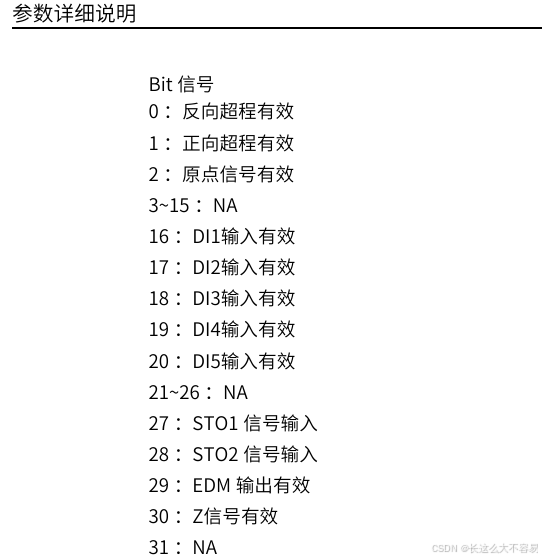
在SDO和PDO中的这些16进制2个字节的存储器,如16#60FD,可以通过驱动器的使用说明书查到对应的含义和作用,下图是汇川660N伺服驱动器手册的参数代号和含义
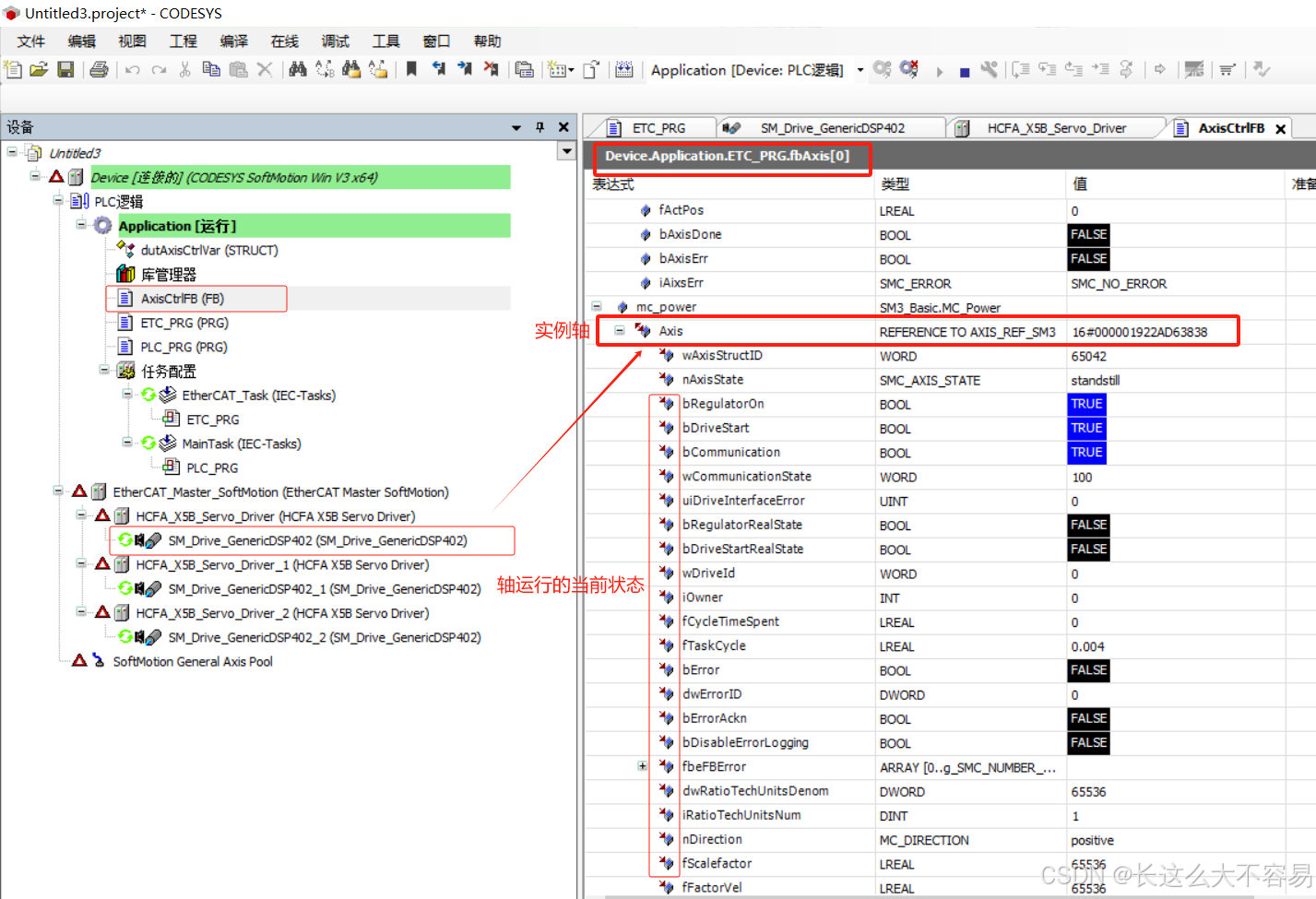
当程序下载到PLC处于在线状态时,以上这些PDO和SDO参数的当前值在实例轴AXIS引用对象中以英文简写的形式在实例轴中能够查看的到,这些Axis数据可以通过Axis.点出,来作为项目中PLC逻辑程序重要的判断依据

















 1239
1239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









