







STM32-PWM驱动硬件
本文来自于《STM32——江科大》的笔记整理。
文章目录
有关定时器和PWM的介绍 --》见 STM32—TIM定时器
7.3.1 驱动LED呼吸灯
因为我们选择的是TIM_CH1_ETR通道,所以我们选择PA0口

我们要产生一个频率为1kHz,占空比为50%,分辨率为1%的PWM波形
ARR+1=100。CCR=50。PSC+1=720
PWM.c
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//开启TIM2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启GPIOA时钟
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO时钟
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);//开启TIM2部分重映射
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//关闭PA15的JTDI功能
GPIO_InitTypeDef GPIO_InitStructure;
//将输出控制权转移给片上外设,需要配置复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//选择内部时钟驱动(定时器上电后默认就是使用内部时钟)
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置时钟分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
//溢出一次就进中断(必须配置,否则上电会被随意赋值)
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
//防止之后如果换了TIM,结构体成员不确定而出现问题
//给结构体赋初始值,
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较模式(PWM模式1)
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性(高极性)
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//开启使能
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
//配置第一个输出比较通道
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);//启动定时器
}
//封装一个函数直接可以改变CCR的值
void PWM_SetCompare1(uint16_t Compare)
{
//直接更改CCR的值
TIM_SetCompare1(TIM2, Compare);
}
PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
uint8_t i;
int main(void)
{
OLED_Init();
PWM_Init();
while (1)
{
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(i);
Delay_ms(10);
}
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(100 - i);
Delay_ms(10);
}
}
}
注意:
在引脚重映射的时候,GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable , ENABLE);
该参数关闭了所有的调试端口,一旦下载到程序里面,再使用STLINK就下载不进去程序了,
这是就只能使用串口下载,下载一个新的,没有解除调试端口的程序,才能把调试端口弄回来
7.3.2 驱动舵机
连线图
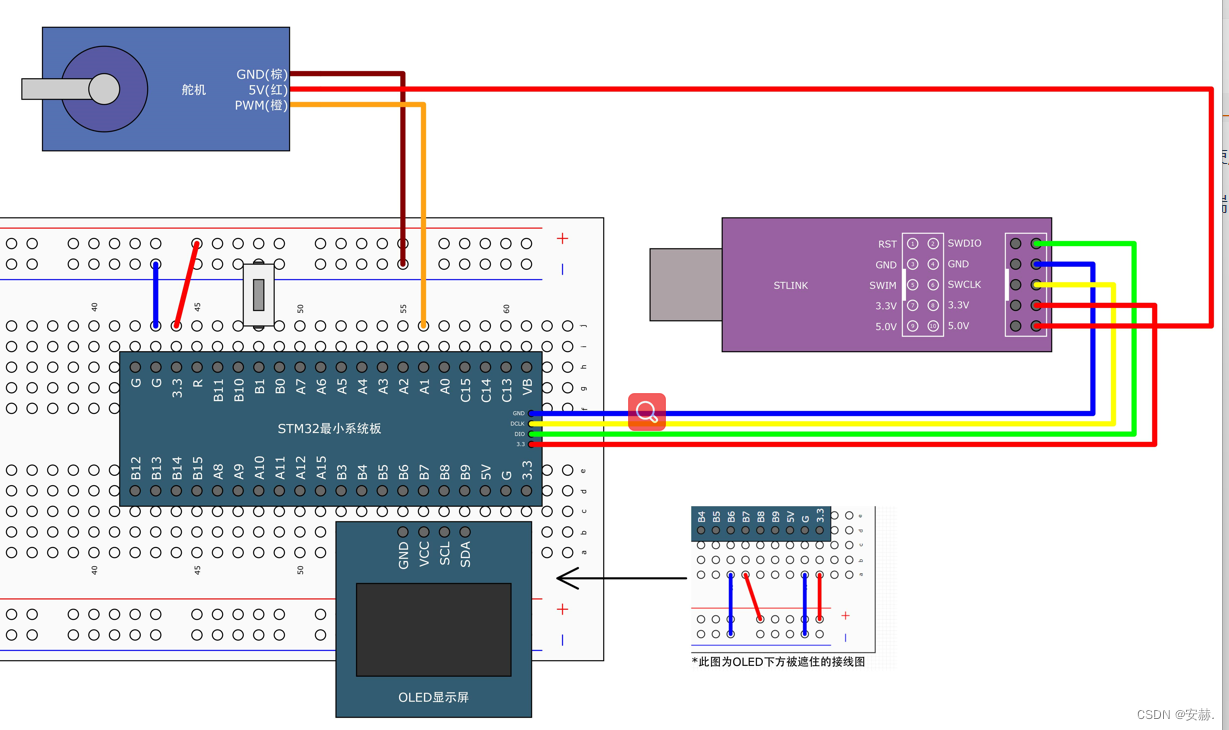
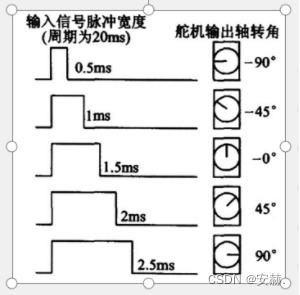
输入PWM信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms
时钟频率–>72000000
求 周期为20ms 则频率为 50Hz (PSC和ARR的值并不固定)
设置PSC–>72 | 1000000 |
设置ARR–>20000 | 50 |
此时 20k对应20ms
那 500对应0.5ms ----2500对应2.5ms
设置占空比(CCR/ARR)–> 500
注意连线的GPIO口(PA1),选择对应的输出比较通道(TIM2_CH2)
PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare2(uint16_t Compare);
#endif
PWM.c
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC2Init(TIM2, &TIM_OCInitStructure);//配置输出比较通道(TIM_CH2)
TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM2, Compare);
}
Servo.h
#ifndef __SERVO_H
#define __SERVO_H
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
Servo.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Servo_Init(void)
{
PWM_Init();
}
/*
输入PWM信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms
0 - 180
500 - 2500
换算对应的比例 x/180*2000+500
*/
void Servo_SetAngle(float Angle)
{
//设置占空比
PWM_SetCompare2(Angle / 180 * 2000 + 500);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Servo.h"
#include "Key.h"
uint8_t KeyNum;
float Angle;
int main(void)
{
OLED_Init();
Servo_Init();
Key_Init();
OLED_ShowString(1, 1, "Angle:");
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
Angle += 30;
if (Angle > 180)
{
Angle = 0;
}
}
Servo_SetAngle(Angle);
OLED_ShowNum(1, 7, Angle, 3);
}
}
7.3.3 驱动直流电机
连线图
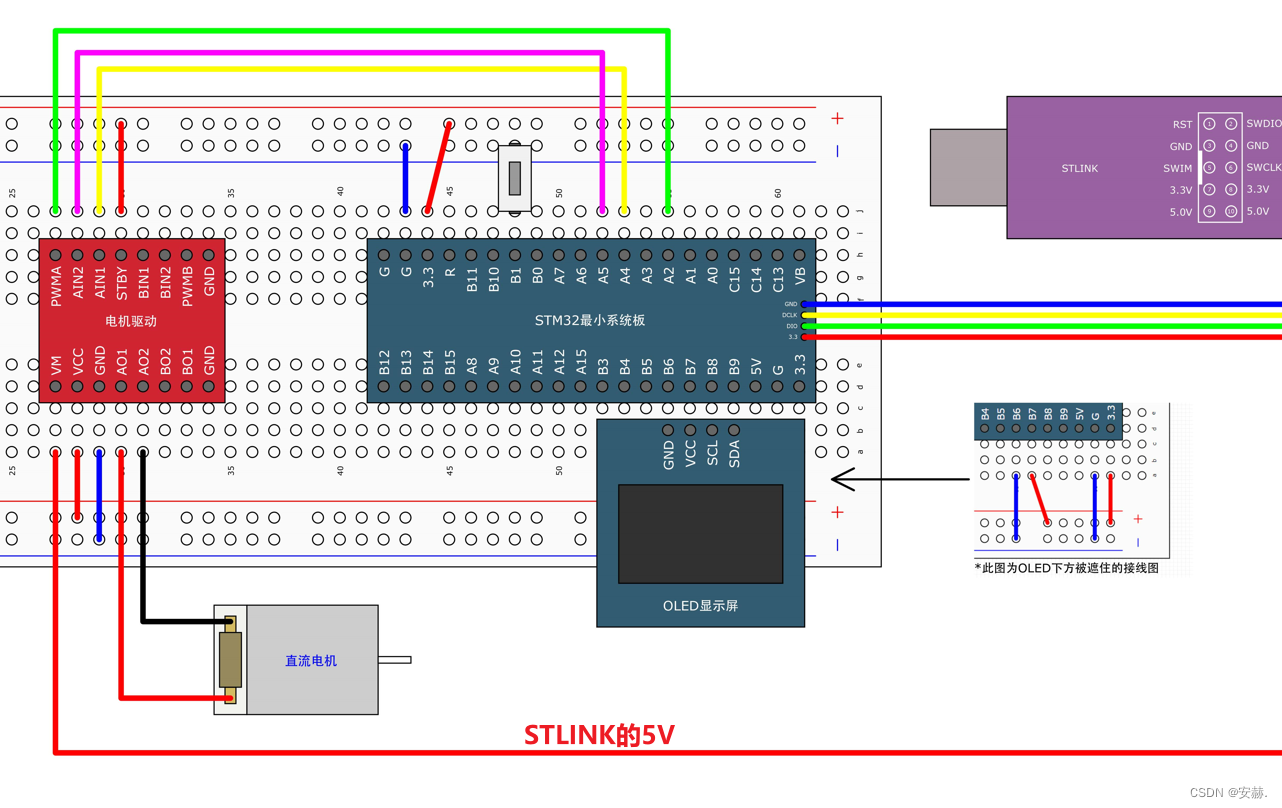
注意连线的PWMA口(PA2),选择对应的输出比较通道(TIM2_CH3)
PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare3(uint16_t Compare);
#endif
PWM.c
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//交给片上外设,使用复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare);
}
Motor.h
#ifndef __MOTOR_H
#define __MOTOR_H
void Motor_Init(void);
void Motor_SetSpeed(int8_t Speed);
#endif
Motor.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWM_Init();
}
void Motor_SetSpeed(int8_t Speed)
{
if (Speed >= 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_4);//高
GPIO_ResetBits(GPIOA, GPIO_Pin_5);//低
PWM_SetCompare3(Speed);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
GPIO_SetBits(GPIOA, GPIO_Pin_5);
PWM_SetCompare3(-Speed);
}
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Motor.h"
#include "Key.h"
uint8_t KeyNum;
int8_t Speed;
int main(void)
{
OLED_Init();
Motor_Init();
Key_Init();
OLED_ShowString(1, 1, "Speed:");
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
Speed += 20;
if (Speed > 100)
{
Speed = -100;
}
}
Motor_SetSpeed(Speed);
OLED_ShowSignedNum(1, 7, Speed, 3);
}
}
百度网盘
PWM驱动呼吸灯
链接:https://pan.baidu.com/s/1tv5TIzhIRJZ9KbLy3j-yyA?pwd=1234
提取码:1234
–来自百度网盘超级会员V2的分享
PWM驱动舵机
链接:https://pan.baidu.com/s/1RhUo8pQipcG0TKtt0zYuyg?pwd=1234
提取码:1234
–来自百度网盘超级会员V2的分享
PWM驱动直流电机
链接:https://pan.baidu.com/s/1W151fYxEttfbxodG1Q5bEQ?pwd=1234
提取码:1234
–来自百度网盘超级会员V2的分享
关注收藏不迷路
给那些看完的朋友,奖励一个 赤赤博客-后端+前端,觉得不错的话可以推荐给身边的朋友哟!



















 2100
2100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











