









前言
我的毕业论文的课题
提示:以下是本篇文章正文内容,下面案例可供参考
一、热敏传感器计算温度(ADC采样单通道)
#include "stm32f10x.h" // Device header
#define T25 298.15
#define B 3380
float Vlue;
uint16_t AD_Value;
void AD_Init(void) //PB1
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_ADCCLKConfig( RCC_PCLK2_Div6);
GPIO_InitTypeDef ADC1_GPIO_Initstruction;
ADC1_GPIO_Initstruction.GPIO_Mode = GPIO_Mode_AIN;
ADC1_GPIO_Initstruction.GPIO_Pin = GPIO_Pin_1;
ADC1_GPIO_Initstruction.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOB, &ADC1_GPIO_Initstruction);
ADC_RegularChannelConfig( ADC1, ADC_Channel_9, 1, ADC_SampleTime_55Cycles5);
ADC_InitTypeDef ADC1_My_Initsture;
ADC1_My_Initsture.ADC_ContinuousConvMode =ENABLE;// DISABLE;
ADC1_My_Initsture.ADC_DataAlign = ADC_DataAlign_Right;
ADC1_My_Initsture.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC1_My_Initsture.ADC_Mode = ADC_Mode_Independent;
ADC1_My_Initsture.ADC_NbrOfChannel = 1;
ADC1_My_Initsture.ADC_ScanConvMode = DISABLE;
ADC_Init(ADC1, & ADC1_My_Initsture);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
ADC_SoftwareStartConvCmd( ADC1, ENABLE);
}
uint16_t AD_GetValue(void) // 这里用的连续转换,非扫描模式
{
//while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}
double myLn(double a)
{
int N = 15;
int k=0,nk=0;
double x=0.0,xx=0.0,y=0.0;
x=(a-1)/(a+1);
xx = x*x;
nk = 2*N+1;
y = 1.0/nk;
for(k = N;k>0;k--)
{
nk = nk -2;
y = 1.0/nk+xx*y;
}
return 2.0*x*y;
}
float Get_Temperaturn(void )
{
float r_f = 0.0,temp_f = 0.0;
AD_Value = AD_GetValue();
Vlue = (float)AD_Value/4095*3.3;
r_f = (Vlue*10000)/(3.3-Vlue); // 计算该温度下的热敏电阻的阻值
temp_f = 1/((myLn(r_f/10000))/B + 1/T25 ) - 273.15;
//根据那个啥开尔文公式算的该时刻的温度(已经减了273.15,所以是摄氏度单位)
return temp_f;
}
看这个图就可以知道配置流程:

我总结了配置流程:
ADC:模拟-数字转换器
ADC可以将引脚上连续变化的模拟量转化为内存中存储的数字变量,
建立起模拟电路到数字电路的桥梁。
12位逐次逼近ADC,1us转换时间。
输入电压范围:0-3.3v,转换结果范围:0-4095
ADC有18个输入通道,可测量16个外部信号源(外部引脚)和两个
内部信号源(内部温度传感器和内部参考电压)
有规则组和注入组两个转换单元。
(模拟看门狗自动监测输入电压范围):监测温度,湿度,电压等,
都会涉及到一个阈值的操作,所以可以模拟看门狗来自动执行。
模拟看门狗可以监测指定的某些通道,当AD值高于设定上阈值或者
低于下阈值时,就会申请中断,然后在中断里面进行相应操作,这样
就不用手动去读取。(但是模拟看门狗监测阈值,当达到阈值会触发
中断,就需要考虑项目怎么做)
ADC1 ADC2,10个外部输入通道
ADC的时钟频率最大14MHz,通过APB2分频过来是72MHz,ADC预分频
器可以2、4、6、8分频,所以只能选择6分频–12mhz或者8分频–9mhz
规则组的4中转换模式:
1·单次转换,非扫描模式
2·连续转换,非扫描模式
3·单次转换,扫描模式
4·连续转换,扫描模式
单次/连续转换:单次转换就是触发一次转换一次,连续转换就是触发一
次,转换一次完了后不需要再触发,直接转换。
扫描/非扫描模式:非扫描模式就是只转换一个通道,扫描模式就是转换多通道。
**
ADC初始化流程:
**
1·开启ADC的RCC时钟,开启引脚的时钟
2· RCC_ADCCLKConfig(uint32_t RCC_PCLK2);ADC最大14mhz,所以6或
者8分频
3·引脚初始化:用模拟输入模式
4·选择规则组的输入通道
ADC_RegularChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_SampleTime);
单通道只需要调用一次,多通道就多次调用。
5·初始化ADC结构体。ADC_Mode:独立模式和双通道模式(独立模式就是ADC1
转化ADC1,ADC2转化ADC2互不打扰);right-右对齐;外部触发转换选择-None(不
使用外部触发,用软件触发);连续转换模式:是不是连续转换;扫描模式是:是不是扫描模式;
指定规则组里面转换通道数目。
6·开启ADC
7·校准ADC
(1·复位校准(寄存器置1);2·等待复位校准完成(校准完成寄存器置0);3·开始校准;4·等待校准完成)
8·获取转化数值
uint16_t AD_GetValue(void)
{
ADC_SoftwareStartConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
//软件触发,ADC已经开始转换
while(ADC_GetFlagStatus(ADC_TypeDef* ADCx, uint8_t ADC_FLAG) == RESET);
//读取规则组转换完成标准位,判断是不是转换完成,没有则等待转换完成。
// ADC_GetFlagStatus 0 -未完成 1-完成
return ADC_GetConversionValue(ADC_TypeDef* ADCx);
}
注意:上面是单次模式。如果需要连续模式(也就是只需要一次触发,然后后面不需要再触发了),
顾名思义就是在初始化的时候就直接触发一次(这里是软件触发)。
所以,需要在初始化ADC结构体时,将连续模式ENABLE,然后完成校准ADC后直接触发一次。
获取转化数值当中就不需要软件触发了,也不需要去等待转换完成,直接返回转换的数值。
**
再说计算的温度
**
Rt = R 乘 EXP(B 乘 (1/T1-1/T2))
对上面的公式解释如下:
- Rt 是热敏电阻在T1温度下的阻值;
- R是热敏电阻在T2常温下的标称阻值;
- B值是热敏电阻的重要参数;
- EXP是e的n次方;
- 这里T1和T2指的是K度即开尔文温度,K度=273.15(绝对温度)+摄氏度;
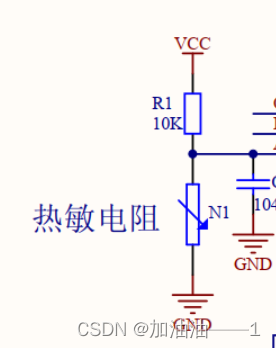
根据串联分压,知道总电压VCC 3.3v,热敏电阻的电压V2是adc采集后经过转换得到的,也是已知,
所以R1的电压就是VCC - V2 ,然后根据R1电阻10K,可以求得电路的电流 I ,所以热敏电阻的
电阻 就可以用电流电压比值,于是得到Rt。
参数R 和 B值都是热敏电阻的参数,根据自己买的器件决定哈,我的就是10k,3380。可以问卖家,
也可以自己网上查型号,然后参数就出来了。
这里还要注意,T2的单位是开尔文,所以室温25摄氏度的开尔文是273.15+25=298.15.
就只剩下T1是未知数,一元一次方程,带进去一算就欧克。
二、控制直流电机(timer的输出比较PWM)
PWM.c
#include "stm32f10x.h" // Device header
// #define ....
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//PA2 tim2µÄch3×öpwmÊä³ö
GPIO_InitTypeDef MyLEDStruction;
MyLEDStruction.GPIO_Mode = GPIO_Mode_AF_PP;//¸´ÓÃÍÆÍêÊä³ö
MyLEDStruction.GPIO_Pin = GPIO_Pin_2;
MyLEDStruction.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &MyLEDStruction);
TIM_InternalClockConfig(TIM2);//Ñ¡Ôñtim2µÄʱÖÓԴΪÄÚ²¿Ê±ÖÓ¡£¿ÉÒÔ²»Ð´£¬ÒòΪĬÈϵľÍÊÇÄÚ²¿Ê±ÖÓ
TIM_TimeBaseInitTypeDef TIM_TimebaseIniture;
TIM_TimebaseIniture.TIM_ClockDivision = TIM_CKD_DIV1; //Óëʱ»ùµ¥ÔªÃ»¶à´ó¹Øϵ¡£
TIM_TimebaseIniture.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimebaseIniture.TIM_Period = 100-1; //TIM_Period = ARR.
TIM_TimebaseIniture.TIM_Prescaler = 720-1; //TIM_Prescaler = PSC.
TIM_TimebaseIniture.TIM_RepetitionCounter = 0;//Öظ´¼ÆÊýÆ÷£¬¸ß¼¶¶¨Ê±Æ÷²ÅÓУ¬ÕâÀïÖ±½Ó¸ø0.
TIM_TimeBaseInit( TIM2, &TIM_TimebaseIniture);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);//¸øÊä³ö±È½Ï½á¹¹Ì帳³õʼֵ£¬Ê¹ÆäÒ»¸ötim¶à·Êä³öpwm²¨Õý³£¡£ÎÞÏ¡Ææ¹Å¹ÖµÄ´íÎó
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputState = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 0;//CCR
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd( TIM2, ENABLE);//¿ªÆôtim2.
}
void PWM_TIM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare);
}
Moter.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
#define MoterA_In_GPIO GPIOA
#define MoterA_In_GPIO_RCC RCC_APB2Periph_GPIOA
#define MoterA_In_Pin1 GPIO_Pin_4
#define MoterA_In_Pin2 GPIO_Pin_5
void Moter_Init(void)
{
GPIO_InitTypeDef MyLEDStruction;
RCC_APB2PeriphClockCmd(MoterA_In_GPIO_RCC,ENABLE);
MyLEDStruction.GPIO_Mode = GPIO_Mode_Out_PP;
MyLEDStruction.GPIO_Pin = MoterA_In_Pin1 | MoterA_In_Pin2;
MyLEDStruction.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MoterA_In_GPIO, &MyLEDStruction);
PWM_Init();
}
void Moter_Speed(int8_t speed)
{
if(speed >= 0)//+
{
GPIO_SetBits(MoterA_In_GPIO, MoterA_In_Pin1);
GPIO_ResetBits(MoterA_In_GPIO, MoterA_In_Pin2);
PWM_TIM_SetCompare3( speed);
}
else
{
GPIO_ResetBits(MoterA_In_GPIO, MoterA_In_Pin1);
GPIO_SetBits(MoterA_In_GPIO, MoterA_In_Pin2);
PWM_TIM_SetCompare3( -speed);
}
}
由于直流电机内部驱动电路,所以我们需要一个驱动模块来驱动它。
TB6612模块驱动直流电机。

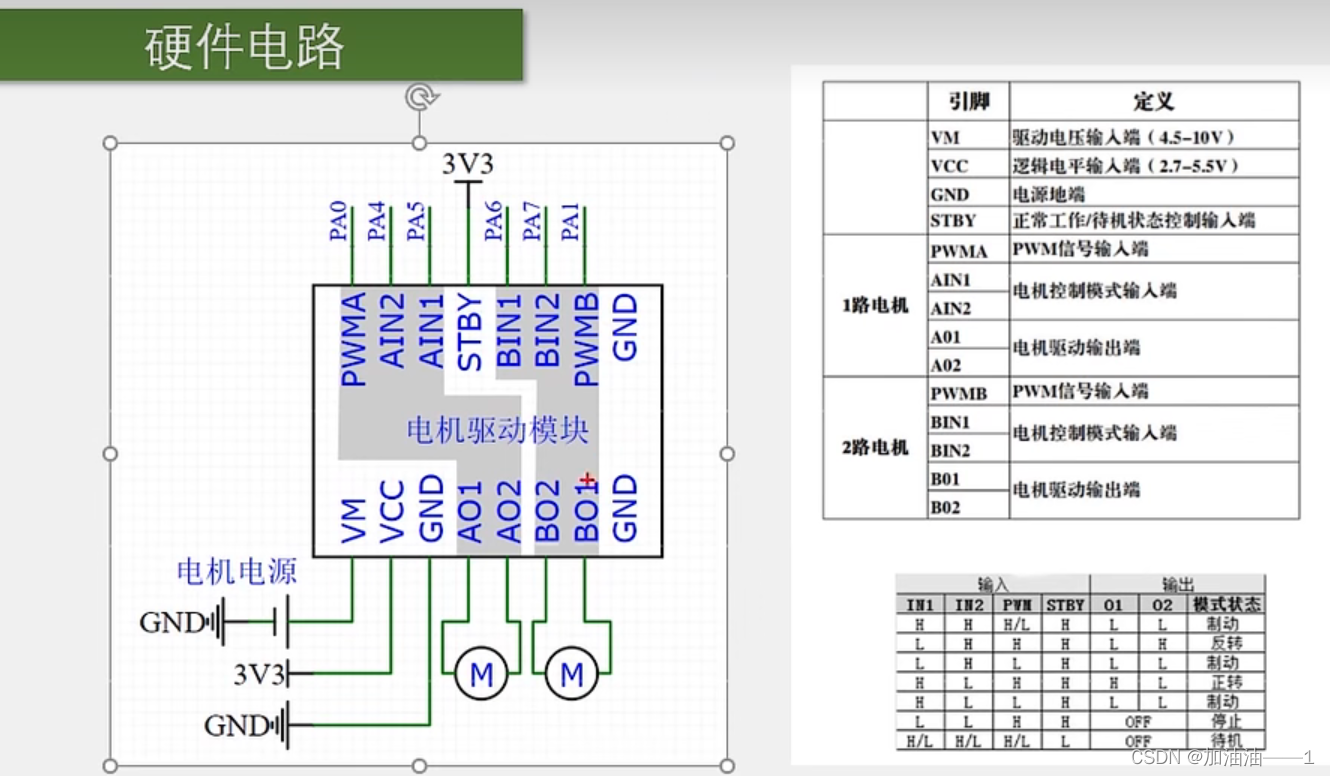
主要的连个模块就是这样了。
接下来是主函数:
int main (void)
{
Key_GPIO_Init();
Moter_Init();
AD_Init();
OLED_Init();
//Moter_Speed(30);
OLED_ShowString(1, 1, "Smart desk lamp");
OLED_ShowString(2, 1, "Mode:");
OLED_ShowString(display_gear_line, 1, "GEAR:0");
OLED_ShowString(display_temp_line, 1, "Temp:00.0C");
while(1)
{
temp_num = Get_Temperaturn();
OLED_ShowNum(display_temp_line, 6, temp_num , 2);
OLED_ShowNum(display_temp_line, 9, (uint8_t)(temp_num*10)%10 , 1);
key_num = Get_KeyNum();
if(key_num == 3)
{
key_change_flag = !key_change_flag;
tempSencor_change_flag = !tempSencor_change_flag;
}
if(key_change_flag) //手动
{
OLED_ShowString(2, 6, "Manual");
if(key_num == 1)
{
speed_num += 30;
gear_num ++;
speed_num = speed_num >= 90 ? 90 : speed_num;
gear_num = gear_num >= 3 ? 3 : gear_num;
Moter_Speed( speed_num );
OLED_ShowNum(display_gear_line, 6, gear_num , 1);
}
if(key_num == 2)
{
speed_num -= 30;
gear_num --;
speed_num = speed_num <= 0 ? 0 : speed_num;
gear_num = gear_num <= 0 ? 0 : gear_num;
Moter_Speed( speed_num );
OLED_ShowNum(display_gear_line, 6, gear_num , 1);
}
}
if(tempSencor_change_flag) // 自动
{
OLED_ShowString(2, 6, "Automatic");
TempSencor_Change_Moter();
}
// 自然风模式
}
实验现象:
三个按键,k1,k2,k3.
k1增大风速,k2,减小风速。
k3切换手动模式,自动模式,自然风模式(电机线坏了,暂时没加)。
可以参考一下主函数去切换不同模式的方法。
总结
1· 32单片机跑裸机的时候,注意,只能有主函数里面的while(1)循环,其他地方不能出现死循环。我试过,跑不出来,崩溃了。
2· 模块化编程,一次最好循环一个模块。这个模块里面可以有一点点延时函数。其实延时函数对于整个系统来说是不友好的,我就
在想有没有一种方法可以计时,但是不吃主控的性能,我的初步想法就是用定时器,定时到了不是申请中断,而是申请事件。后面看
能不能试一下。















 1907
1907











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









