







前言
使用硬件I2C是,不用编写协议时序细节,通过寄存器配置好MCU的I²C控制器,I²C控制器便可控制引脚自动输出I²C时序。这里还是基于STM32F103_MIN开发板,以读写EEPROM(ATC2402)为例,进行回顾和分析。
I2C控制器
STM32F103系列的I2C控制器,可作为通信主机或从机,因此有4中工作模式可选择:主机发送模式、主机接收模式,从机发送模式、从机接收模式。
传输速度上,支持标准模式和快捷模式。同时还支持SMBus2.0(系统管理总线)和PMBus(电源管理时钟总线)。
I2C控制器结构如下:
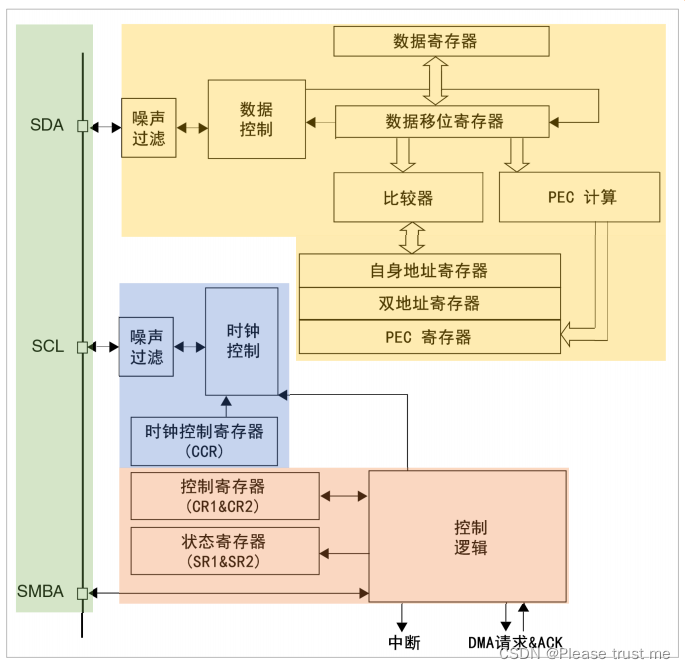 引脚:I2C协议只需要两个引脚(SDA和SCL),SMBA引脚仅用于SMBus模式的Alert引脚,通常不用管。
引脚:I2C协议只需要两个引脚(SDA和SCL),SMBA引脚仅用于SMBus模式的Alert引脚,通常不用管。
数据收发:主要涉及到数据寄存器(DR)和数据移位寄存器(DSR)。
当发送数据时,将发送的字节写入DR,硬件会把DR中的字节搬到DSR中,然后再时钟信号的配合下,把DSR最高位的数据放到数据线SDA上,并对DSR进行移位操作。
当接收数据时,数据控制器(Data Control)根据时钟信号,把SDA线上的高低电平转换为“1”或“0”的数据,写到DSR的最低位,同时DSR移位操作,当接收完一个字节的8位数据后,把DSR中的数据搬到DR寄存器中。
时钟信号:时钟控制器用于驱动同步时钟信号线SCL。通过配置时钟控制寄存器(CCR),可以调整SCL的频率。
逻辑控制:有两个控制寄存器CR1和CR2用于控制逻辑。通过它们可以触发起始和停止信号,做出ACK响应,配置外设时钟频率,开启DMA和中断功能,同时控制逻辑的状态会反馈到SR1和SR2两个状态寄存器上,根据它们可以知道当前总线是否被占用,本机是主设备还是从设备,数据是否发送完毕等。
设计思路
目的:使用MCU的硬件I2C,获取AT24C02的数据。
- 初始化I2C协议相关参数:设置速度、寻址长度模式等;
- 初始化I2C硬件相关参数: I2C时钟使能、 GPIO端口时钟使能、 GPIO引脚设置为I2C复用;
- 使用HAL提供的I2C对AT24C02读写,封装AT24C02初始化函数、数据读取函数;
- 主函数编写控制逻辑:按下按键KEY,读取一次AT24C02数据,并将数据通过串口打印;
本实验配套代码位于“ 5_程序源码\9_通信—硬件I2C\”。
源码分析
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include<stdio.h>
#include <string.h>
#include "i2c.h"
#include "eeprom.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_NVIC_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
char tx_data[20]={"Hello I2C"};
char rx_data[20]={0};
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
I2C_Init();
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* Initialize interrupts */
MX_NVIC_Init();
/* USER CODE BEGIN 2 */
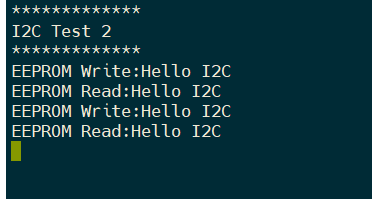
printf("*************\r\n");
printf("I2C Test 2\r\n");
printf("*************\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(get_keyvalue()){
//发送数据
EEPROM_WriteNByte(0,(uint8_t *)tx_data,sizeof(tx_data));
HAL_Delay(1);
printf("EEPROM Write:%s\r\n",rx_data);
EEPROM_ReadNByte(0,(uint8_t *)rx_data,sizeof(rx_data));
HAL_Delay(1);
printf("EEPROM Read:%s\r\n",rx_data);
//清空接收缓冲区
memset(rx_data,0,sizeof(rx_data));
}
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief NVIC Configuration.
* @retval None
*/
static void MX_NVIC_Init(void)
{
/* EXTI0_IRQn interrupt configuration */
HAL_NVIC_SetPriority(EXTI0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
/* USART1_IRQn interrupt configuration */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
i2c.c
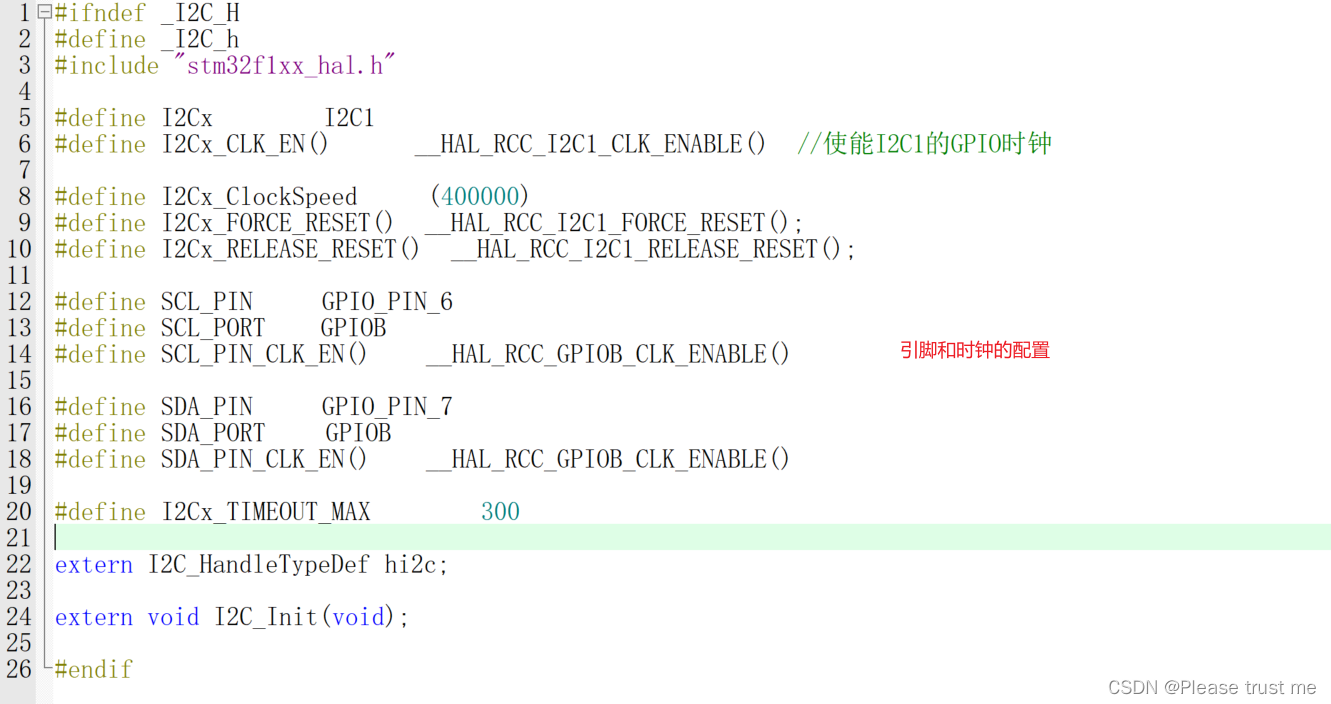
i2c.h
#include"i2c.h"
#include "main.h"
#include "usart.h"
#include <stdio.h>
#include "stm32f1xx_hal_i2c.h"
I2C_HandleTypeDef hi2c;
//初始化I2C速率和地址格式
void I2C_Init(void){
hi2c.Instance =I2Cx; //I2C寄存器基地址
hi2c.Init.ClockSpeed =I2Cx_ClockSpeed;
hi2c.Init.DutyCycle =I2C_DUTYCYCLE_2; //I2C的SCL时钟占空比
hi2c.Init.GeneralCallMode=I2C_GENERALCALL_DISABLE;//设置广播呼叫模式
hi2c.Init.NoStretchMode =I2C_NOSTRETCH_DISABLE;//设置禁止时钟延长模式
hi2c.Init.AddressingMode=I2C_ADDRESSINGMODE_7BIT;//设置I2C寻址长度
hi2c.Init.DualAddressMode=I2C_DUALADDRESS_DISABLE;//是否使用两个STM32的设备地址
hi2c.Init.OwnAddress1 =0x0A; //STM32的设备地址1(支持7和10bit)
hi2c.Init.OwnAddress2 =0; //STM32的设备地址2(只支持7bit)
if(HAL_I2C_Init(&hi2c)!=HAL_OK){
Error_Handler();
}
}
//使能I2C时钟,引脚时钟,并设置复位
void HAL_I2C_MspInit(I2C_HandleTypeDef *hi2c){
GPIO_InitTypeDef GPIO_InitStruct;
if(hi2c->Instance==I2Cx){
I2Cx_CLK_EN(); //使能I2C时钟
SCL_PIN_CLK_EN(); //使能引脚时钟
SDA_PIN_CLK_EN();
GPIO_InitStruct.Pin=SCL_PIN;
GPIO_InitStruct.Mode=GPIO_MODE_AF_OD;
GPIO_InitStruct.Speed=GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Pull=GPIO_NOPULL;
HAL_GPIO_Init(SCL_PORT,&GPIO_InitStruct);
GPIO_InitStruct.Pin=SDA_PIN;
HAL_GPIO_Init(SDA_PORT,&GPIO_InitStruct);
I2Cx_FORCE_RESET(); //强制复位
I2Cx_RELEASE_RESET();//释放复位 I2C初始化后 有一定概率 处于总线忙碌,返回I2C_BUSY强制复位有改善
}
}
eeprom.c
eeprom.h
#ifndef _EEPROM_H
#define _EEPROM_H
#include"stm32f1xx_hal.h"
#include "stm32f1xx_hal_i2c.h"
#define EEPROM_DEV_ADDR (0xA0)
#define EEPROM_WR (0x00)
#define EEPROM_RD (0x01)
#define EEPROM_WORD_ADDR_SIZE (0x08)
void EEPROM_WirteByte(uint16_t addr,uint8_t data);
void EEPROM_ReadByte(uint16_t addr,uint8_t *pdata);
void EEPROM_WriteNByte(uint16_t addr,uint8_t *pdata,uint16_t size);
void EEPROM_ReadNByte(uint16_t addr,uint8_t *pdata,uint16_t size);
#endif
eeprom.c
#include "i2c.h"
#include <stdio.h>
#include "usart.h"
#include "eeprom.h"
#include "main.h"
//写一个字节的数据
void EEPROM_WirteByte(uint16_t addr,uint8_t data){
uint8_t write_data[10];
uint8_t data_num;
if(EEPROM_WORD_ADDR_SIZE==0x08){//判别型号
write_data[0]=(uint8_t)(addr & 0x00ff);
write_data[1]=data;
data_num=2;
}else
{
write_data[0]=(uint8_t)(addr>>8);
write_data[1]=(uint8_t)(addr & 0xff);
write_data[2]=data;
data_num=3;
}
//发送给数据和地址
if(HAL_I2C_Master_Transmit(&hi2c,EEPROM_DEV_ADDR | EEPROM_WR,write_data,data_num,3000)!=HAL_OK){
Error_Handler();
}
while(HAL_I2C_GetState(&hi2c)!=HAL_I2C_STATE_READY);
}
//读一个字节
void EEPROM_ReadByte(uint16_t addr,uint8_t *pdata){
uint8_t write_data[10];
uint8_t data_num;
if(EEPROM_WORD_ADDR_SIZE==0x08){
write_data[0]=(uint8_t)(addr & 0x00ff);
data_num=1;
}
else{
write_data[0]=(uint8_t)(addr>>8);
write_data[1]=(uint8_t)(addr & 0x00ff);
data_num=2;
}
//发送数据
if(HAL_I2C_Master_Transmit(&hi2c,EEPROM_DEV_ADDR | EEPROM_WR,write_data,data_num,300)!=HAL_OK){
Error_Handler();
}
while(HAL_I2C_GetState(&hi2c)!=HAL_I2C_STATE_READY);
//接收数据
if(HAL_I2C_Master_Receive(&hi2c,EEPROM_DEV_ADDR | EEPROM_RD,pdata,1,300)!=HAL_OK){
Error_Handler();
}
}
//写N个字节的数据
void EEPROM_WriteNByte(uint16_t addr,uint8_t *pdata,uint16_t size){
uint16_t i=0;
for(;i<size;i++){
EEPROM_WirteByte(addr,pdata[i]);
addr++;
HAL_Delay(10);//期间要间隔至少5ms
}
}
void EEPROM_ReadNByte(uint16_t addr,uint8_t *pdata,uint16_t size){
uint8_t i=0;
for(;i<size;i++){
EEPROM_ReadByte(addr,&pdata[i]);
addr++;
}
}
运行结果















 1619
1619











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











