







 本文介绍了AUTOSARUDS中的85服务(ControlDTCSetting),用于控制DTC状态更新,包括应用场景、控制原理、请求与响应格式,以及NRC的使用。特别强调了在诊断刷写和特殊场景下DTC控制的重要性。
本文介绍了AUTOSARUDS中的85服务(ControlDTCSetting),用于控制DTC状态更新,包括应用场景、控制原理、请求与响应格式,以及NRC的使用。特别强调了在诊断刷写和特殊场景下DTC控制的重要性。
功能简介
85服务,即 ControlDTCSetting(控制 DTC 设置)服务,该服务用于停止或继续ECU中 DTC 状态位的更新(是否记录DTC)。
可以使用 ControlDTCSetting(控制 DTC 设置)请求消息来停止个别ECU或一组ECU中 DTC 状态位的更新。
应用场景
常见场景:
- 用于在诊断刷写的过程中关闭DTC记录,因为在刷写的过程中往往是针对某个ECU节点单独进行刷写,其他的对手件ECU节点始终处于正常工作状态,那么此时应当发送功能寻址给到各ECU节点使得其停止记录DTC,刷写完成之后在重新开启对手件DTC记录功能即可。
- 用于某些特殊不需要记录DTC的场景;
DTC控制基本原理
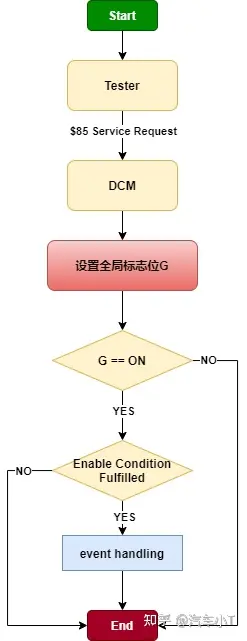
针对85服务的通信控制过程会经过如下几个AUTOSAR BSW模块进行处理,然后完成最终的通信控制,具体步骤如下:
- Client 发送诊断指令给到Server,Server接收到指令后内部会置位某全局变量;
- 软件内部故障触发时,会首先检查如下两个条件是否满足才会进行event的处理;
- 1、enable condition是否满足;
- 2、DTC控制有无关闭(85服务);
只有当enable condition满足并且抑制DTC上报的开关为FALSE的情况下,上报的故障事件才能够得到进一步处理;
请求和响应
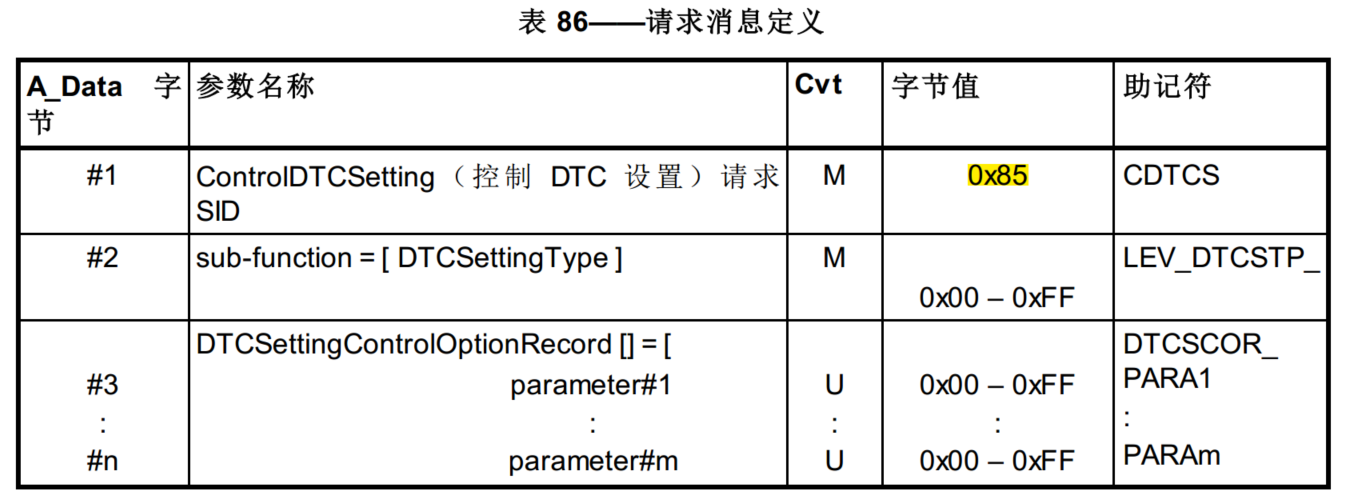
1、请求
基本格式
归纳起来,诊断的request格式无非以下两种:
<SID> + <Sub-function> + <Parameter>
<SID> + <Parameter>
即有无sub-function的区别。Parameter可以是DID,可以是输入参数,可以是自定义的值,字节数视具体要求而定。
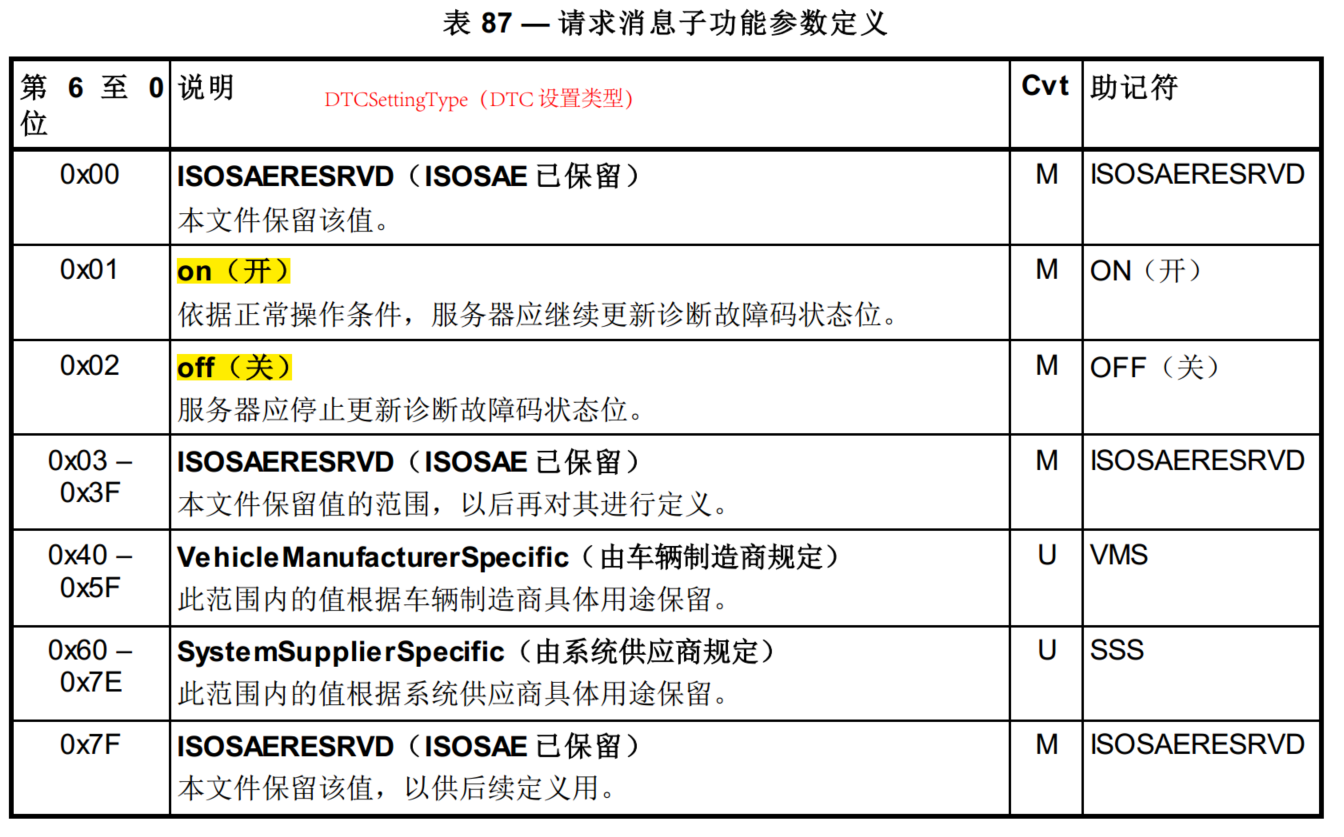

2、子功能
子功能参数定义(1字节数据):
- Bit7:抑制肯定响应消息指示位suppressPosRspMsgIndicationBit
- 0=False:需要肯定响应
- 1=True:禁止肯定响应
- Bit6-0:子功能参数值(0x00~0x7F)
无。
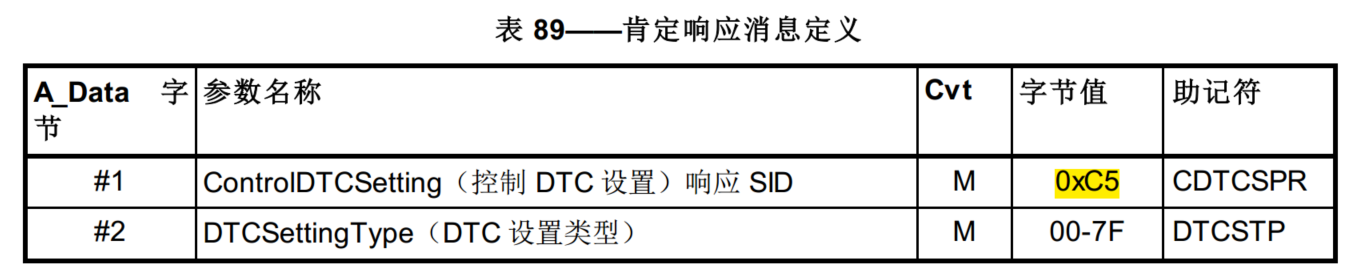
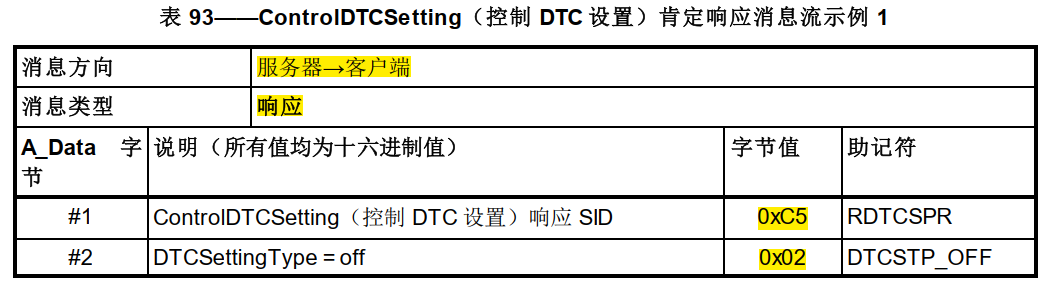
3、肯定响应
基本格式:
<SID + 0x40> + <Sub-function> + <Parameter>
<SID + 0x40> + <Parameter>
要注意,第一个字节是由SID和0x40的和构成。这里的Parameter项是optional的,具体要看协议规定。
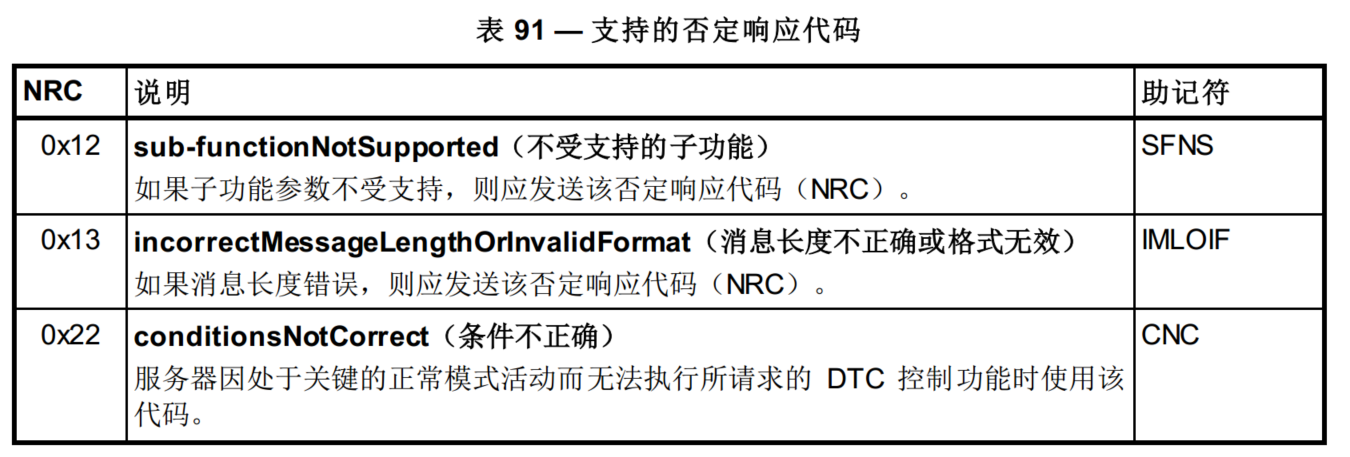
4、否定响应
基本格式:
<0x7F> + <SID> + <NRC>
看起来比较简单,格式比较固定,只要是Negative Response,第一字节就是0x7F,第二字节照抄原来的SID,第三个字节是错误响应码,指示具体错误响应的原因

注意
- 当通过85服务控制DTC不报出时,也就意味着当前DTC的状态将不会更新,DTC状态将保持现状;
- 一旦85服务控制DTC报出或者session超时回到默认会话或者软件复位等操作时,那么此时DTC状态将会继续保持更新;
- 当85服务控制DTC不报出时,此时执行14清除DTC服务时,DTC的状态将会正常被14服务处理,不会收到85服务的影响;
- 如果某event并没有Mapping DTC,那么85服务将不会对这个event做任何处理,因为85服务处理的基本对象是DTC;
- 如果某故障event发生会触发安全行为,此时如果执行85服务抑制DTC,同时触发14服务那么DTC状态将会被清除,相应的安全行为可能失效,因为对于安全关键系统,一般建议出现这种情况时,已触发的安全行为不应该被同步抑制;
报文示例
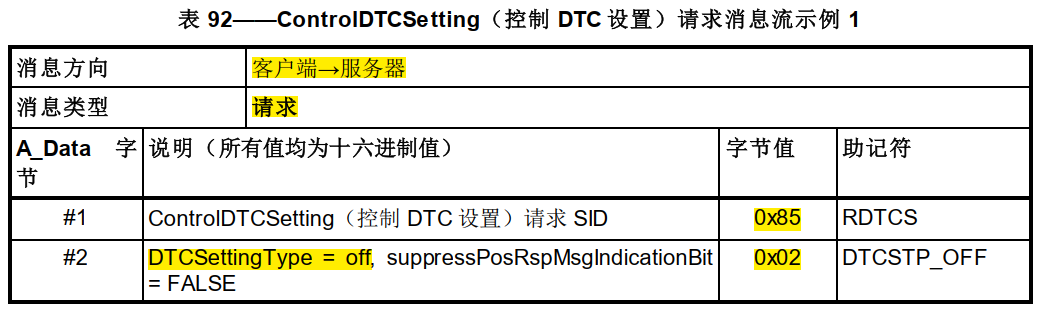
- 示例 1—ControlDTCSetting(控制 DTC 设置)( DTCSettingType = off)
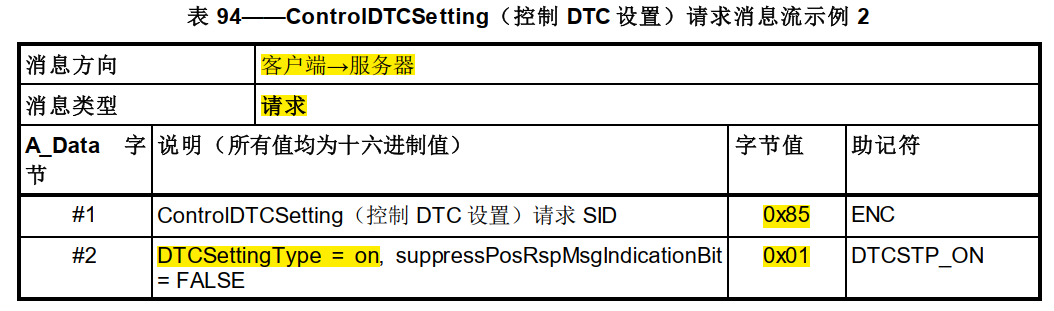
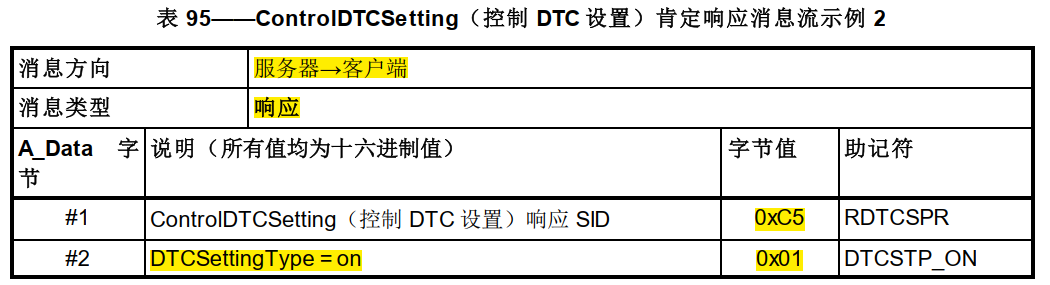
- 示例 2—ControlDTCSetting(控制 DTC 设置)( DTCSettingType = on)
UDS中常用 NRC

参考
- https://zhuanlan.zhihu.com/p/567271514

















 7812
7812

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









