







目录
1.2 RFID硬件——读写器
内 容:能够读取RFID卡S50的ID——编程实现串口数据收发
学 时:3学时
知识点:电路图设计、USART配置
重点: USART配置
难点:USART配置
时间:2022年12月22日 9:00~11:50
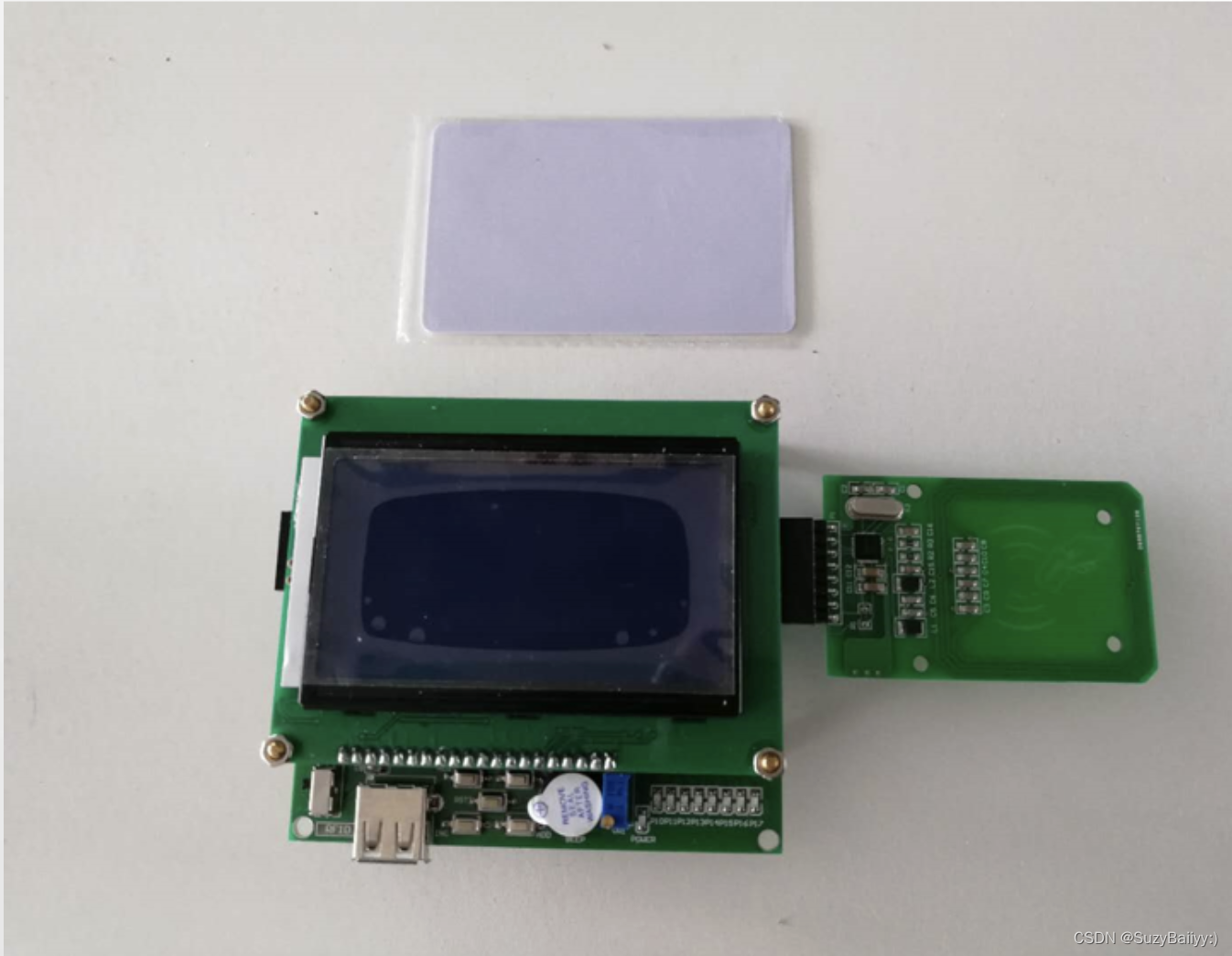
一、RFID硬件环境
硬件环境主要包括:
S50射频卡
MFRC522读写器
STC11F单片机
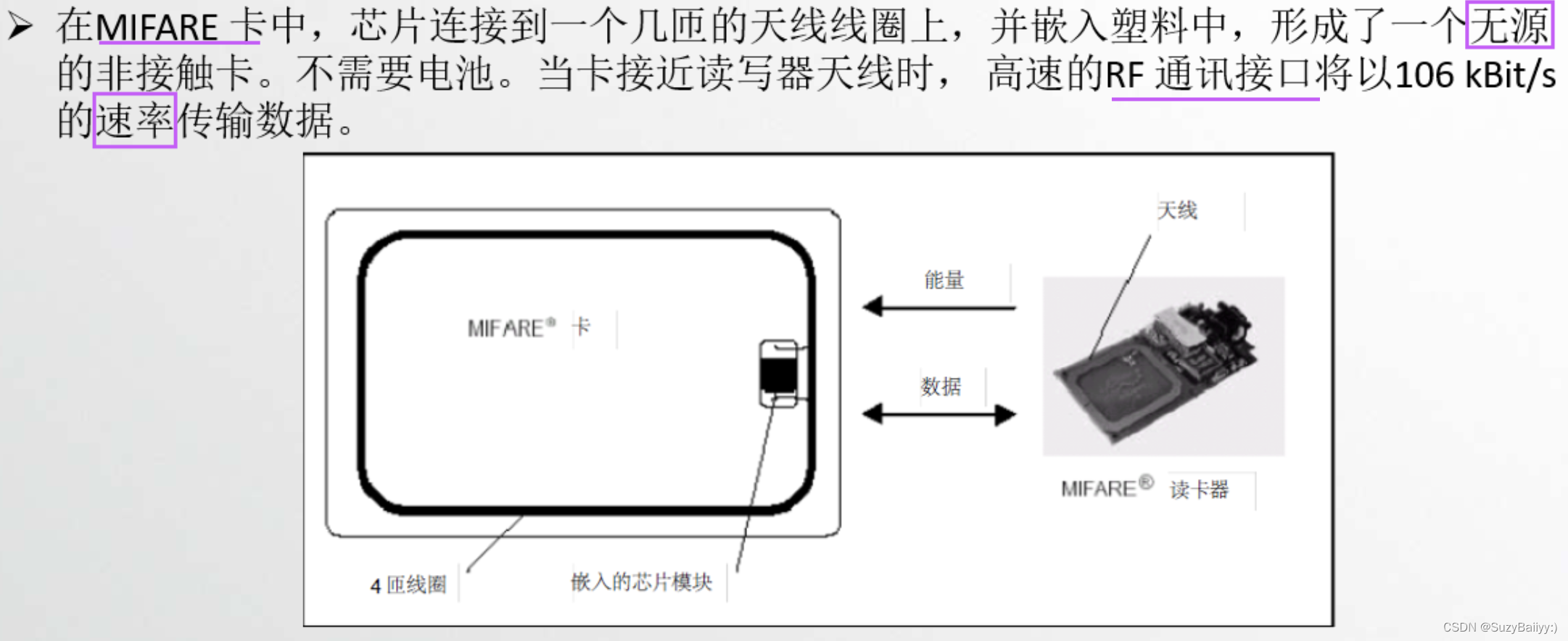
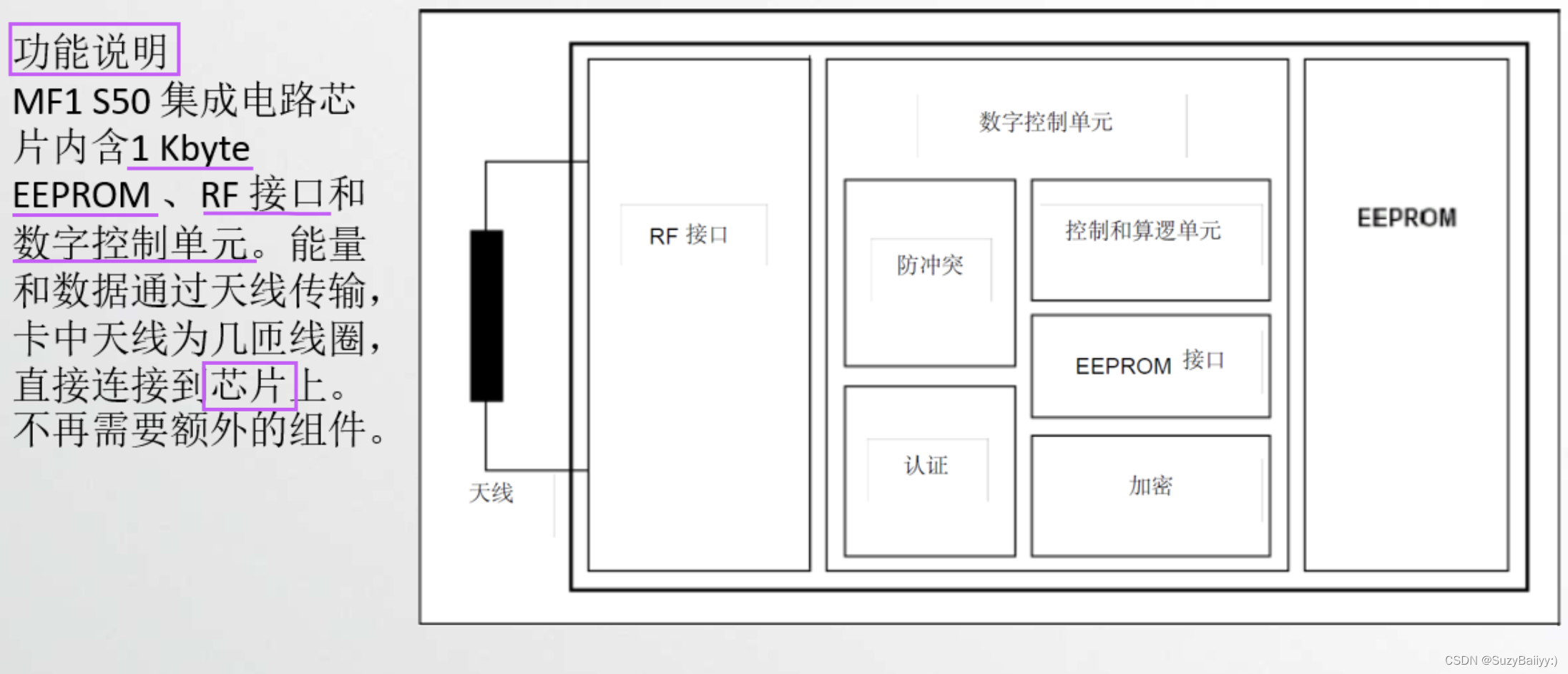
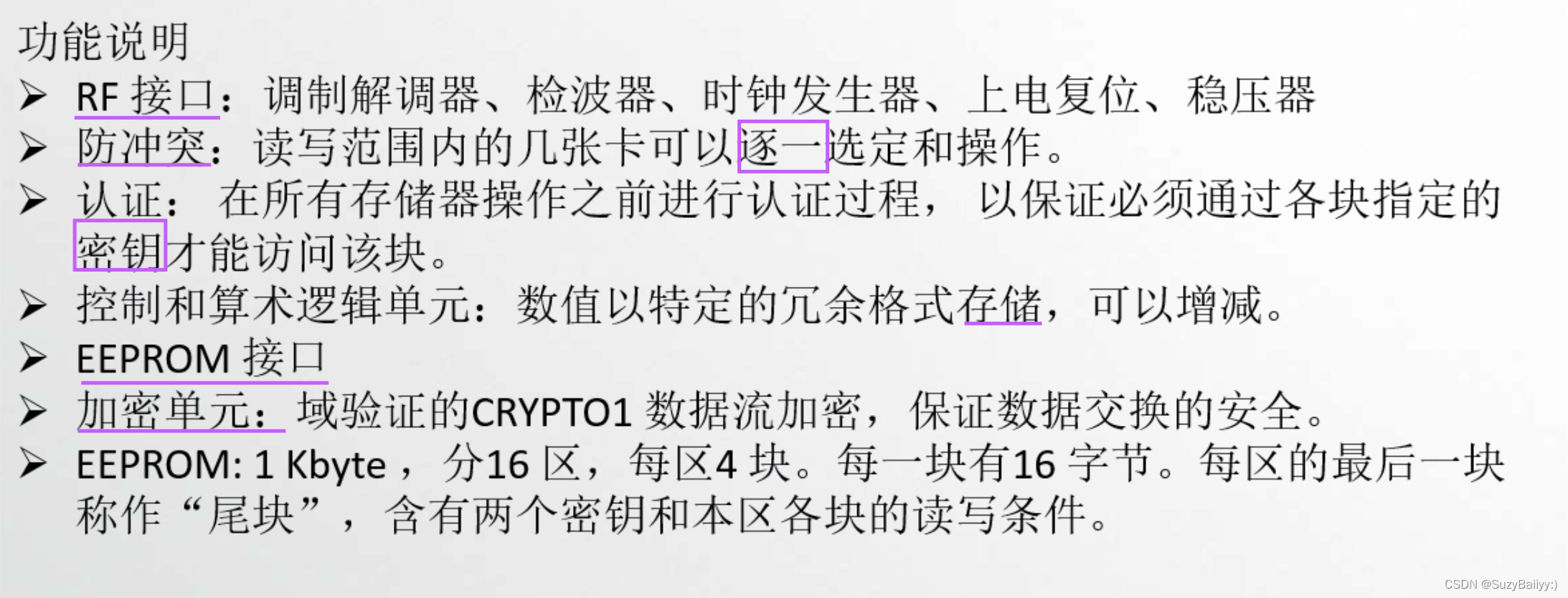
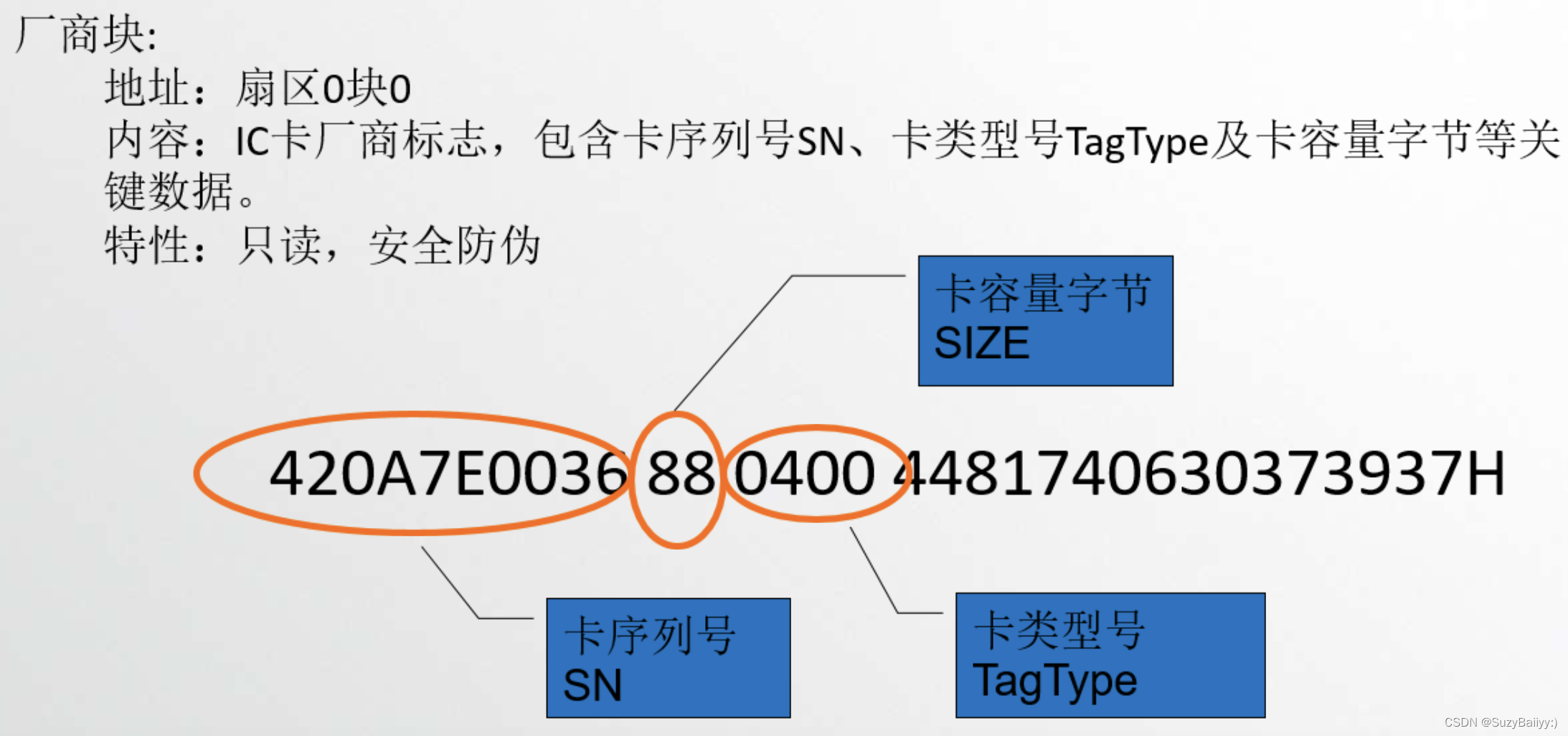
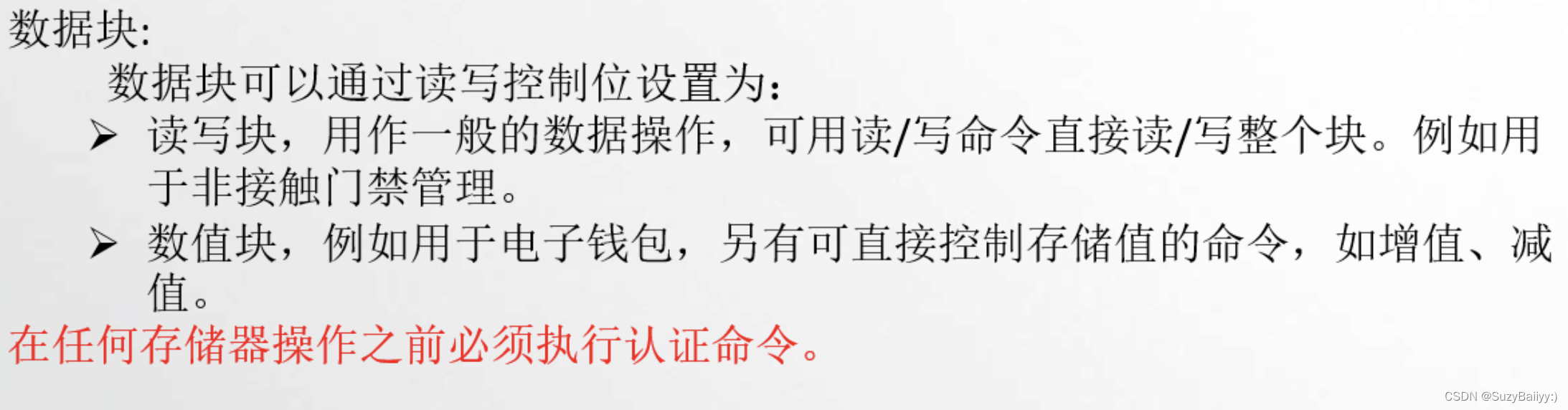
1.1 RFID硬件——射频卡
S50射频卡特性






1.2 RFID硬件——读写器
MFRC522是高度集成的非接触式(13.56MHz)读写卡芯片,此发送模块利用调制和调节的原理,并将它们完全集成到各种非接触式通信方法和协议中。它支持ISO14443A/MIFARE。















 731
731











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









