







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
模糊控制是一种在控制系统中应用模糊集合理论的方法。它通过将模糊集合的概念引入控制系统中,使得控制器能够处理模糊信息和不确定性,从而实现对系统的精确控制。在水位控制系统中,模糊控制器可以被用来调节水位,使得系统能够在不同的工况下保持稳定的水位。
模糊控制水位控制器算法流程包括以下几个步骤:
-
确定模糊集合 在模糊控制水位控制器中,首先需要确定输入和输出的模糊集合。输入模糊集合可以是水位的变化率,而输出模糊集合可以是阀门的开度。确定模糊集合的过程需要根据系统的实际情况和控制要求来进行。
-
确定模糊规则 确定模糊集合之后,需要建立模糊规则库。模糊规则库是由一系列的if-then规则组成,其中if部分是输入的模糊集合,then部分是输出的模糊集合。通过建立模糊规则库,可以实现从模糊输入到模糊输出的映射关系。
-
模糊推理 在确定了模糊规则库之后,就可以进行模糊推理。模糊推理是指根据输入的模糊集合和模糊规则库,得到输出的模糊集合的过程。在水位控制系统中,模糊推理可以帮助确定阀门的开度,从而实现对水位的控制。
-
解模糊化 最后一个步骤是解模糊化,即将模糊输出转化为具体的控制量。解模糊化的方法有很多种,常用的方法包括最大隶属度法、平均值法和加权平均法等。通过解模糊化,可以将模糊输出转化为具体的阀门开度,从而实现对水位的精确控制。
总的来说,模糊控制水位控制器算法流程包括确定模糊集合、建立模糊规则库、模糊推理和解模糊化这几个步骤。通过这些步骤,可以实现对水位的精确控制,使得水位控制系统能够在不同的工况下保持稳定的水位。模糊控制水位控制器算法流程在实际应用中具有很大的潜力,可以帮助提高水位控制系统的性能和稳定性。
📣 部分代码
%水位模糊控制算法clear all;close all;num=2;den=[5,1];umax=0.01;N=3000;sys=tf(num,den);a = newfis('fuzzy tank');%创建并返回一个新的FIS系统y0=y+y0;e=y0-R;yy(1,k)=y0;% yy(1,k)=y;endkk=[1:N]*0.1;figure(1);plot(kk,yy,'r');
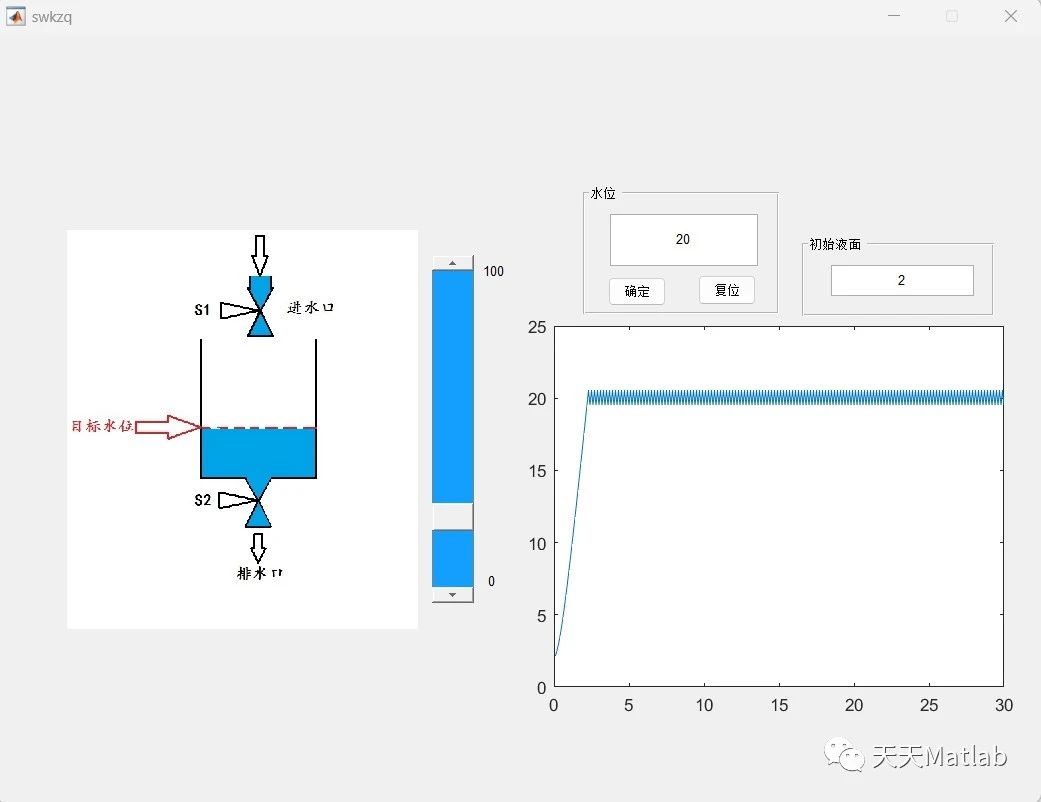
⛳️ 运行结果
🔗 参考文献
[1] 王劲松,朱会东,杨伟红.基于Matlab的锅炉水位模糊控制[J].機械與電子, 2008, 2008(012):34-37.DOI:10.3969/j.issn.1001-2257.2008.12.010.
[2] 李中宁.基于MATLAB的锅炉水位模糊控制系统的设计和分析[D].长春理工大学,2008.DOI:10.7666/d.y1242344.
[3] 王劲松,朱会东,杨伟红.基于Matlab的锅炉水位模糊控制[J].机械与电子, 2008(12):4.















 379
379











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









