







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
这个项目是关于利用MATLAB平台对具有6自由度(DOF)手臂、6自由度腿部和2自由度颈部的人形机器人进行编程。该研究涵盖了包括正运动学和逆运动学、步态生成、速度控制、路径规划和轨迹生成在内的各个方面。在整个项目过程中,我们实施和评估了不同的算法和技术,以实现机器人的精确和高效运动。这项研究的成果有助于人形机器人编程的进展,并支持智能和有能力的人形机器人在各种应用中的发展。
人形机器人一直是科技领域的热门研究课题。它们可以在许多领域发挥重要作用,例如医疗、教育、娱乐和军事。然而,要使人形机器人能够完成各种任务,就需要对它们进行精确的编程,以实现复杂的动作和行为。
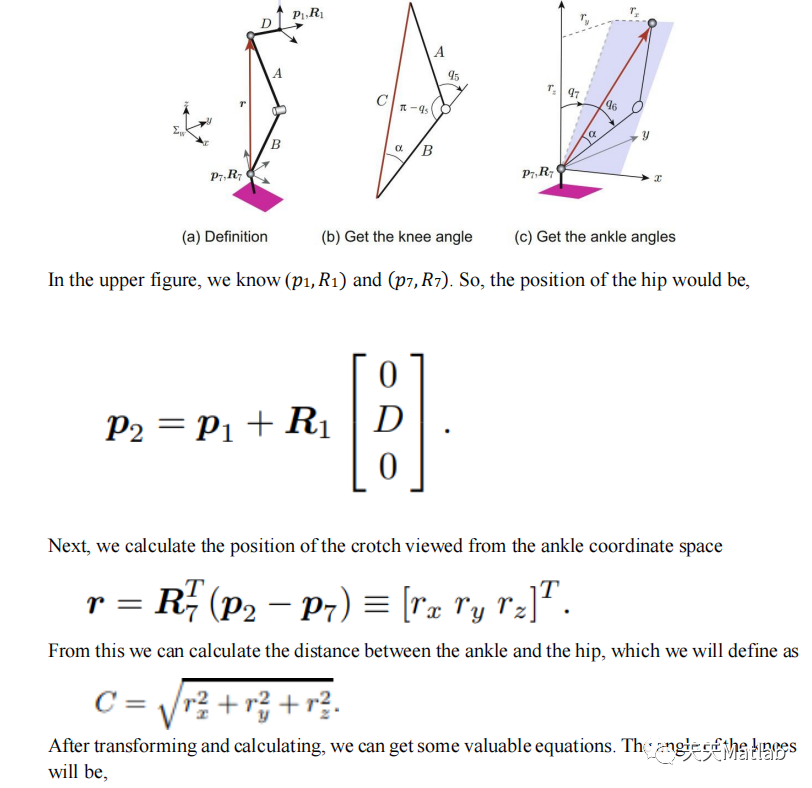
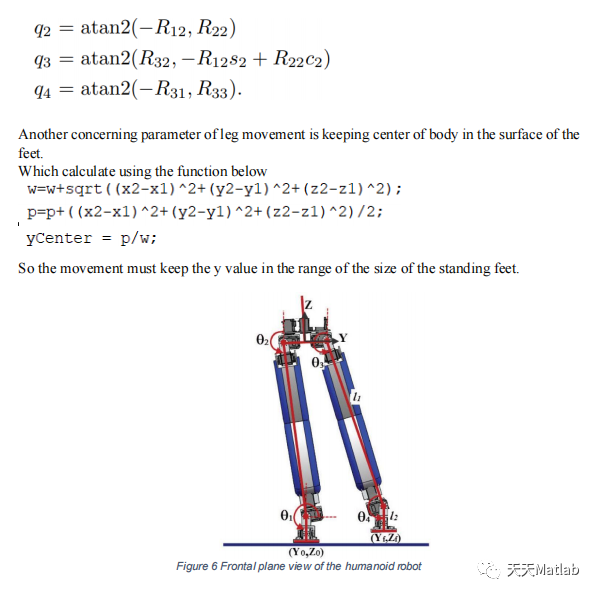
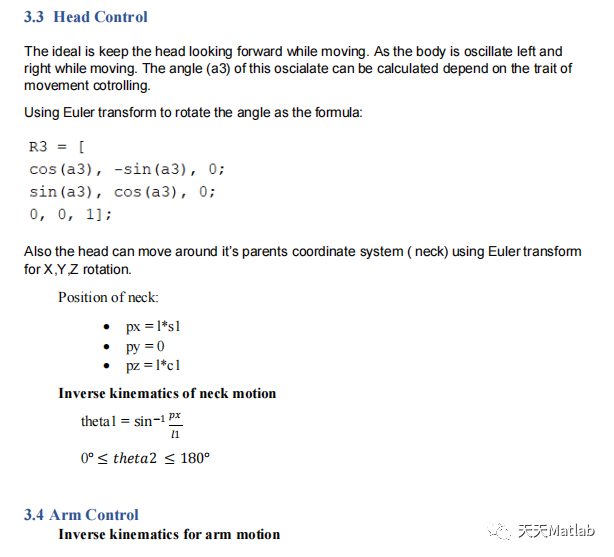
在这个项目中,我们首先关注了机器人的运动学。正运动学帮助我们确定机器人各个关节的位置和姿态,而逆运动学则允许我们根据所需的末端效应器姿态来确定各个关节的角度。通过对运动学的深入研究和实践,我们能够确保机器人的运动轨迹是准确可控的。
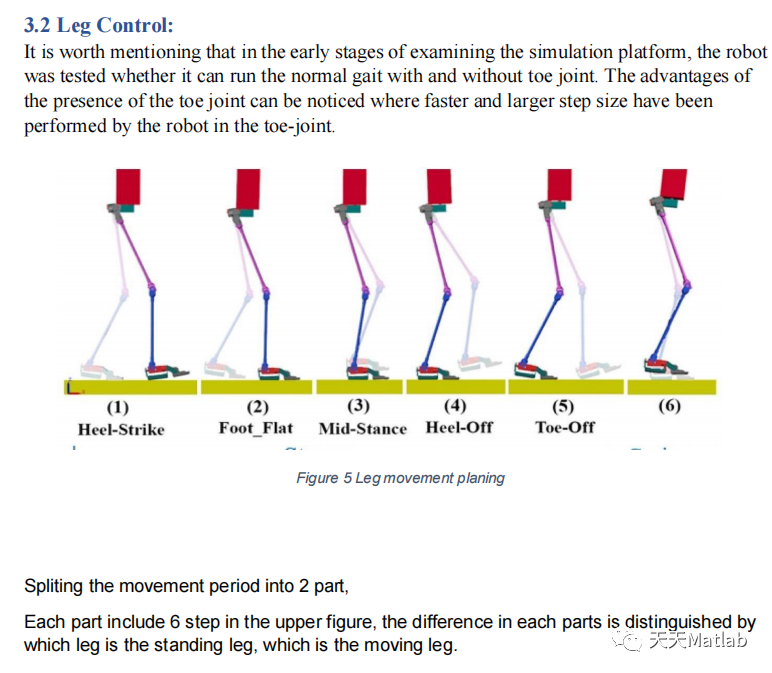
接下来,我们致力于开发机器人的步态生成和速度控制。这对于机器人在执行各种任务时能够保持平衡和稳定至关重要。我们通过实验和模拟,研究了不同的步态生成算法,并确定了最适合我们机器人的方法。同时,我们也探索了速度控制技术,以确保机器人在移动过程中能够保持适当的速度和加速度。

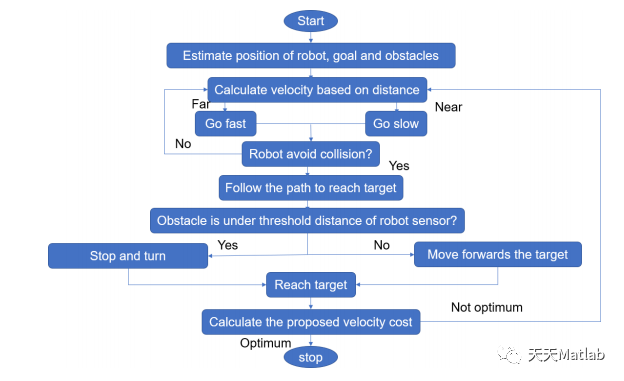
路径规划和轨迹生成是项目中的另一个重要方面。我们需要确保机器人能够在复杂环境中自主导航,并按照预定的轨迹执行任务。因此,我们研究了不同的路径规划算法,并开发了适合我们机器人的轨迹生成技术。
通过这个项目,我们不仅深入了解了人形机器人的编程和控制技术,还为该领域的发展做出了贡献。我们的研究成果有望为未来智能和有能力的人形机器人的应用提供支持,促进人形机器人技术的进步。我们期待着将来能够看到我们的研究成果在各种领域发挥重要作用,为人类社会带来更多的便利和创新。
📣 部分代码
function [w,p]=Than(w,p,i,j)r = [i-5; -5+j; 40];% Reference orientationR = eulerXYZ(0, 0, 0);% Side lengthsLx = 10;Ly = 10;Lz = 40;% Verticesvertices_0 = [0, 0, 0; % #1Lx, 0, 0; % #20, Ly, 0; % #30, 0, Lz; % #4Lx, Ly, 0; % #50, Ly, Lz; % #6Lx, 0, Lz; % #7Lx, Ly, Lz]; % #8vertices = r' + vertices_0*R';% Facesfaces = [1, 2, 5, 3; % #11, 3, 6, 4; % #21, 4, 7, 2; % #34, 7, 8, 6; % #42, 5, 8, 7; % #53, 6, 8, 5]; % #6% Draw patchh = patch('Faces', faces, 'Vertices', vertices, 'FaceColor', "#00FFFF");hold ongrid onend
⛳️ 运行结果
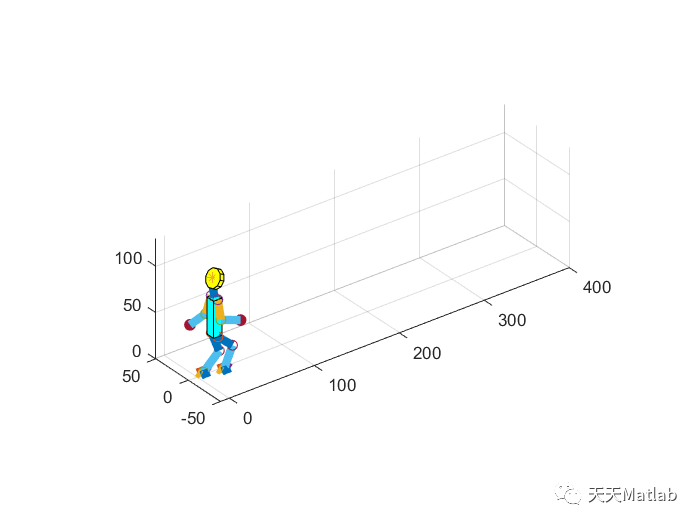















 1129
1129











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









