







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
1. 引言
在计算机视觉领域,目标滤波跟踪是一个重要的研究课题。其目的是估计目标在视频序列中的位置和状态,以便进行进一步的分析和处理。卡尔曼滤波是一种广泛应用于目标滤波跟踪的算法,它能够有效地处理噪声和不确定性,并提供准确的估计结果。
2. 卡尔曼滤波的基本原理
卡尔曼滤波是一种递归滤波算法,它通过对观测值进行更新,不断地改进对状态的估计。卡尔曼滤波的基本原理包括以下几个步骤:
-
**状态预测:**在当前时刻,根据上一时刻的状态和控制输入,预测出下一时刻的状态。
-
**协方差预测:**计算出下一时刻的状态协方差矩阵。
-
**卡尔曼增益:**根据状态预测协方差矩阵和观测噪声协方差矩阵,计算出卡尔曼增益矩阵。
-
**状态更新:**根据卡尔曼增益矩阵和观测值,更新出当前时刻的状态。
-
**协方差更新:**根据卡尔曼增益矩阵和观测噪声协方差矩阵,更新出当前时刻的状态协方差矩阵。
3. 卡尔曼滤波在目标滤波跟踪中的应用
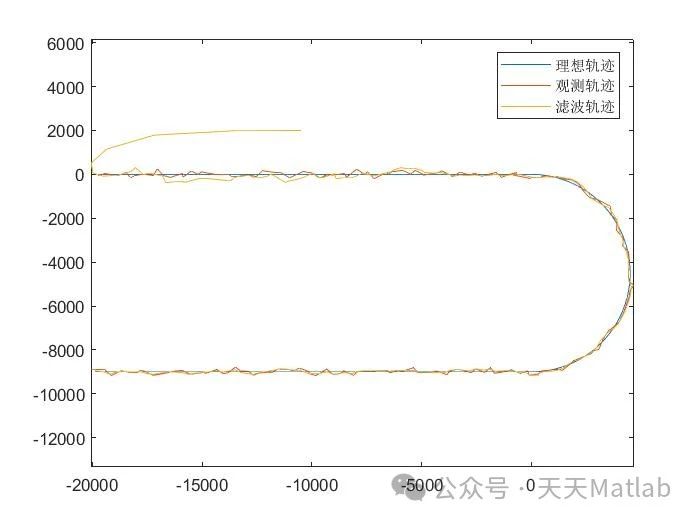
在目标滤波跟踪中,卡尔曼滤波可以用来估计目标的位置和状态。首先,需要对目标进行建模,确定其状态变量。然后,根据观测值,使用卡尔曼滤波算法不断地更新对状态的估计。
4. 卡尔曼滤波在目标滤波跟踪中的优势
卡尔曼滤波在目标滤波跟踪中具有以下几个优势:
-
**鲁棒性强:**卡尔曼滤波能够有效地处理噪声和不确定性,即使在观测值存在噪声的情况下,也能提供准确的估计结果。
-
**实时性好:**卡尔曼滤波是一种递归算法,可以实时地处理观测值,并提供最新的估计结果。
-
**计算量小:**卡尔曼滤波的计算量相对较小,即使在处理大量观测值时,也能保持较高的实时性。
📣 部分代码
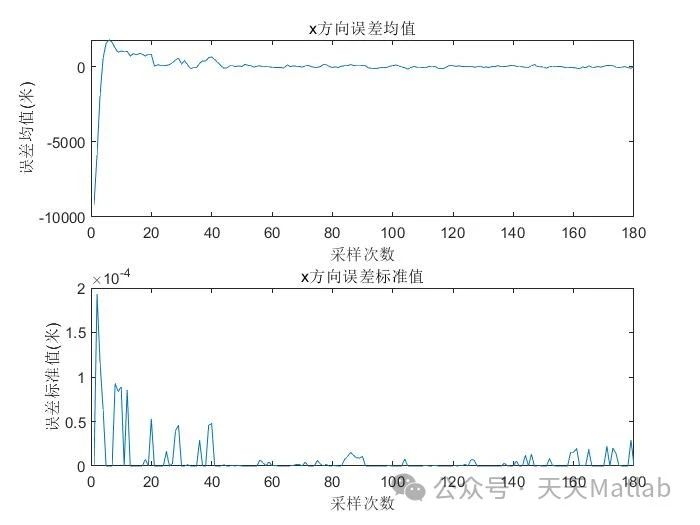
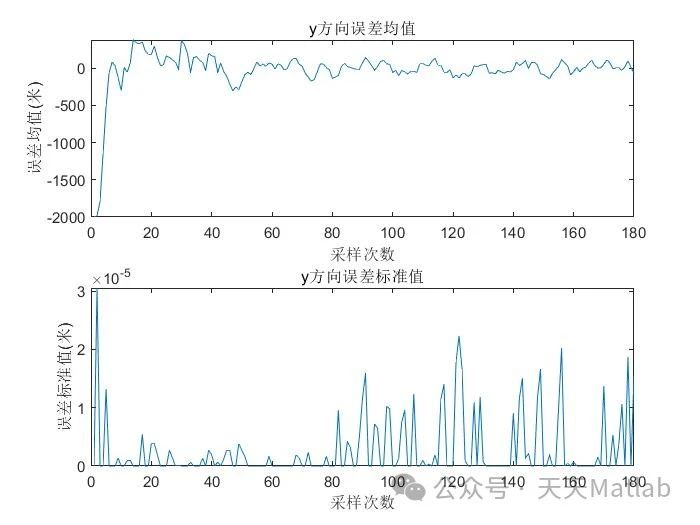
function main()%产生观测数据total=3*60;%总的时间长度global T;%采样周期T=1;N=total/T;%数据长度a=50;var_rx=100;var_ry=100;X=[];%观测数据X_ideal=[];%理想数据for i=1:N[rx,ry]=track(i*T,20);X_ideal=[X_ideal,[rx;ry]];rx=rx+var_rx*randn(1,1);ry=ry+var_ry*randn(1,1);X=[X,[rx;ry]];endX_filter=zeros(size(X));%滤波后数据X_mean=X_filter;%蒙特卡洛平均数据Error_var=zeros(size(X));M=10;%蒙特卡洛仿真次数for iCount=1:MX_filter=Trace(X);X_mean=X_mean+X_filter;Error_var=Error_var+(X_ideal-X_filter).^2;endX_mean=X_mean/M;Error_var=Error_var/M;Error_mean=X_ideal-X_mean;%误差均值Error_var=sqrt(Error_mean.^2);set(gca,'FontSize',12); set(gcf,'Color','White');plot(X(1,:),X(2,:),X_mean(1,:),X_mean(2,:),'x');xlabel('X(米)'),ylabel('Y(米)');axis equal;legend('真实轨迹','滤波轨迹');figure;k=1:N;set(gca,'FontSize',12); set(gcf,'Color','White');subplot(2,1,1),plot(k,Error_var(1,:)/N);title('x方向误差标准值');xlabel('采样次数'),ylabel('RMSE(米)');subplot(2,1,2),plot(k,Error_var(2,:)/N);title('y方向误差标准值');xlabel('采样次数'),ylabel('RMSE(米)');%理想航迹方程function [x,y]=track(t,a)% t:时间% x:横轴位移% y:纵轴位移% a:转弯处加速度% r:初始位置% v:初始速度r=[0,0]';v=300+randn(1,1);w=a/v;%角速度t1=pi/w;t2=t1+pi/w;D=v^2/a*2;%圆周运动直径if t<=0x=0,y=0;elseif t>0&&t<=t1angel=t*w;x=D/2-D/2*cos(angel);y=D/2*sin(angel);elseif t>t1&&t<=t2angel=(t-t1)*w;x=(3-cos(angel))*D/2;y=-D*sin(angel);elsex=D+D+v*(t-t2);y=0;endfunction R=Trace(X)%飞行器跟踪模拟% X:观测数据% R:输出坐标%观测时间间隔global T;%观测矩阵H=[1,0,0,0,0;...0,1,0,0,0];var_v=30;var_a=2;var_v2=var_v^2;var_a2=var_a^2;Q=zeros(5,5);Q(4,4)=var_v2;Q(5,5)=var_a2;%初始状态s0=[0,0,0,300,0]';%Kalman滤波跟踪N=size(X,2);%观测数据长度s=s0;a=@traverse;M=Q;Xplus=[];%修正后的航迹for icurrent=1:N[s,M]=Karlman(s,M,X(:,icurrent),a,Q,C,H);Xplus=[Xplus;(s(1:2))'];endR=Xplus';function s_estimate=traverse(s)%状态方程global T;s_estimate=zeros(5,1);s_estimate(1)=s(1)+s(4)*cos(s(3))*T;s_estimate(2)=s(2)-s(4)*sin(s(3))*T;s_estimate(3)=s(3)+(s(5)/s(4))*T;s_estimate(4)=s(4);s_estimate(5)=s(5);s=s+K*(X-H*s);%最小MSE矩阵(协方差更新方程)I=eye(5);M=[I-K*H]*M*[I+K*H]'-K*C*K';
⛳️ 运行结果
5. 总结
卡尔曼滤波是一种广泛应用于目标滤波跟踪的算法,它能够有效地处理噪声和不确定性,并提供准确的估计结果。卡尔曼滤波在目标滤波跟踪中具有鲁棒性强、实时性好、计算量小的优势。
🔗 参考文献
[1]乔坤,郭朝勇,史进伟.基于卡尔曼滤波的运动人体跟踪算法研究[J].计算机与数字工程, 2012, 40(1):4.DOI:10.3969/j.issn.1672-9722.2012.01.001.















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









