






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
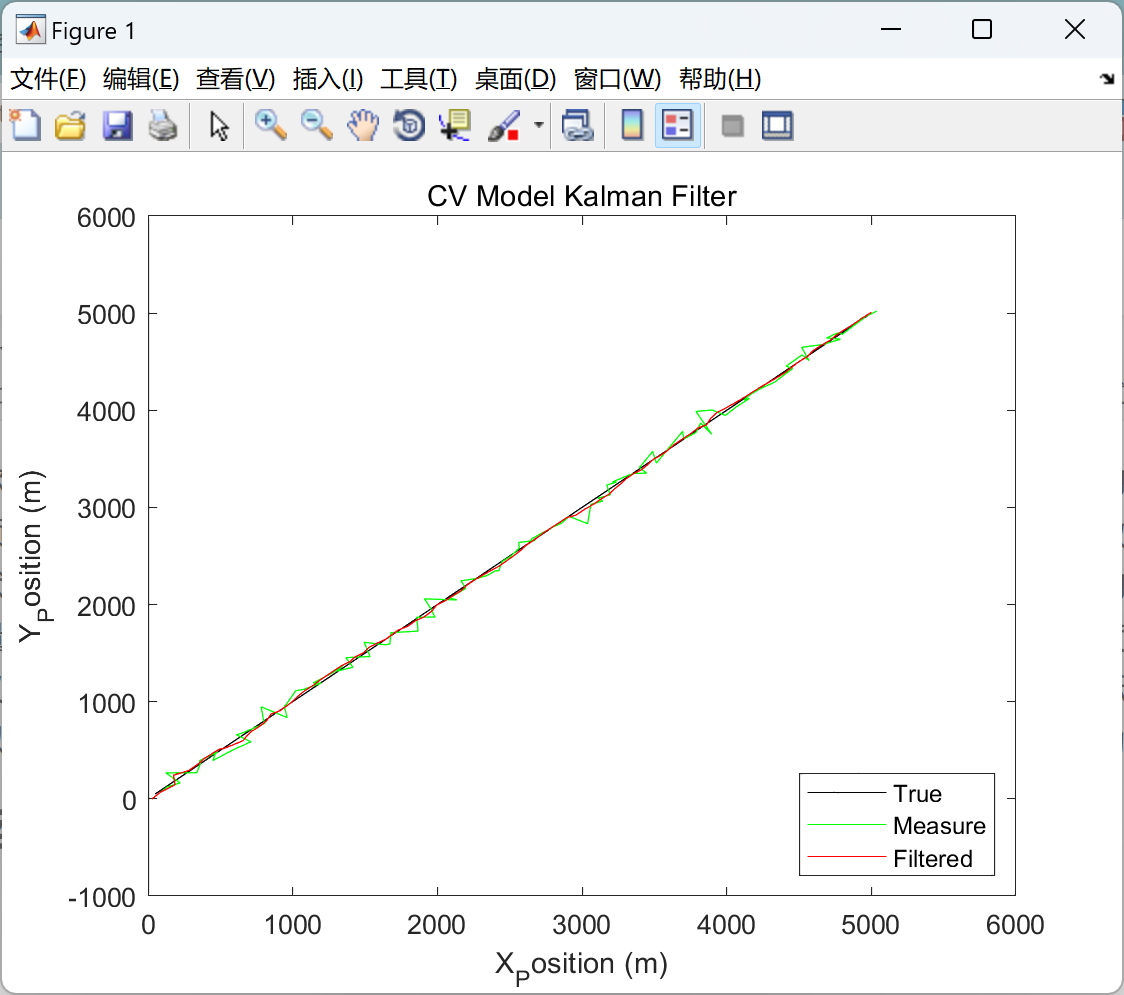
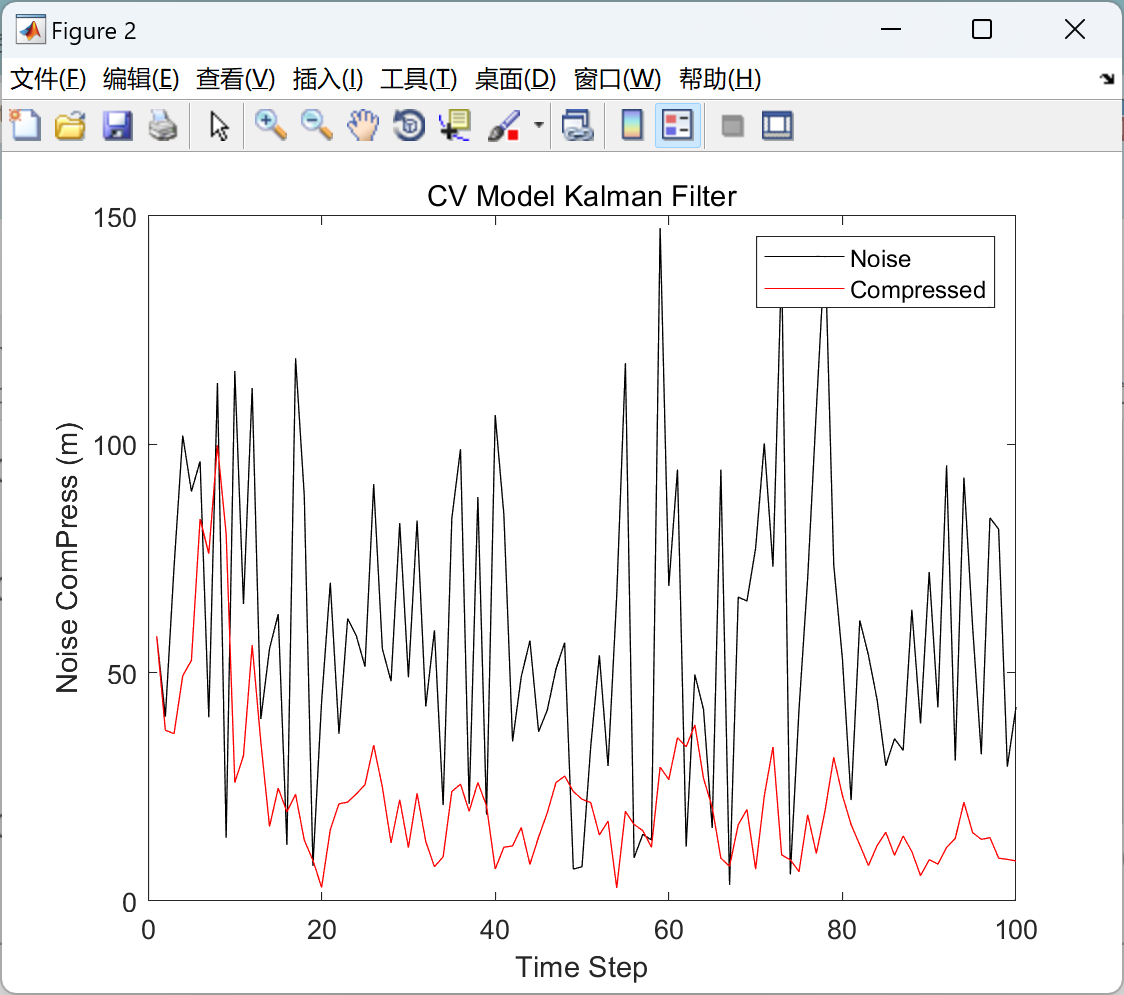
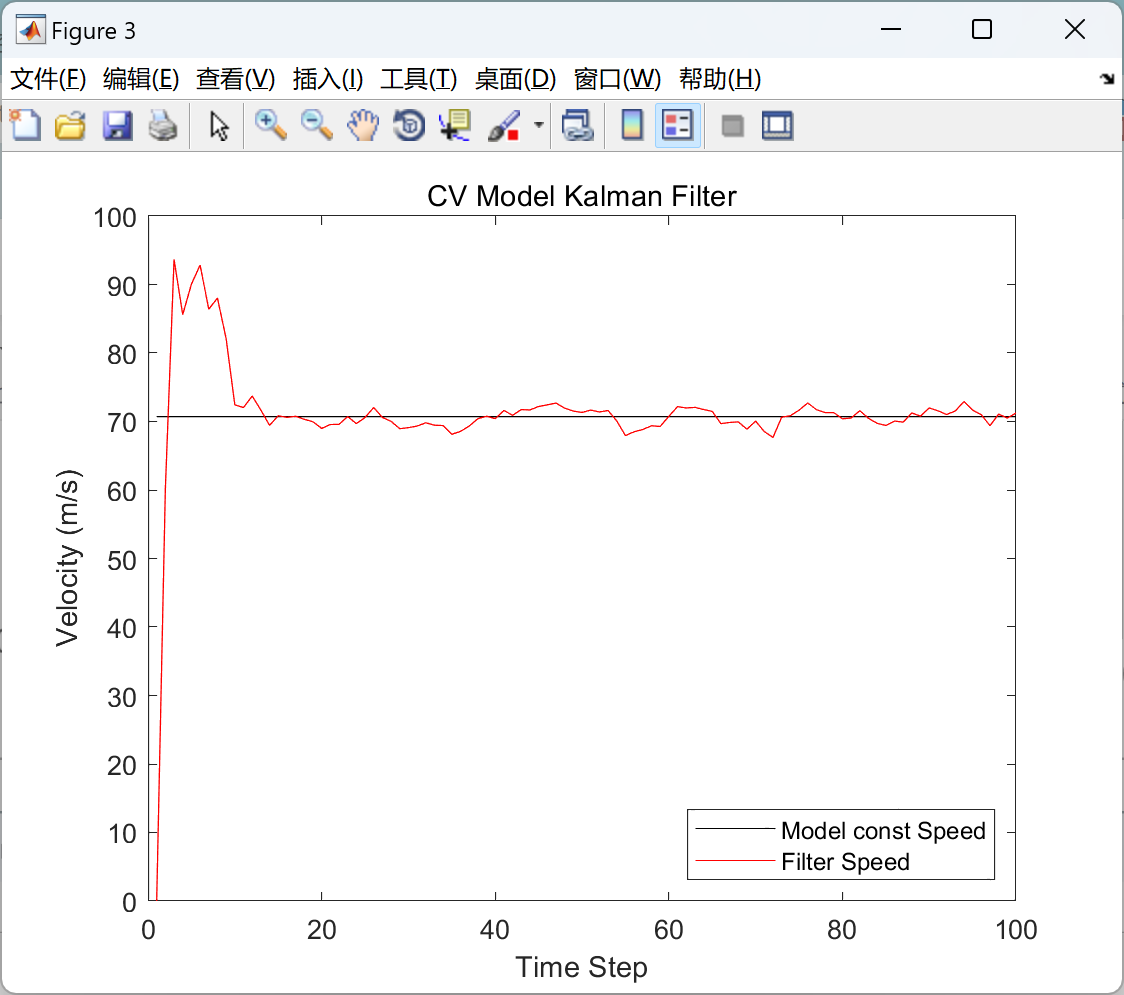
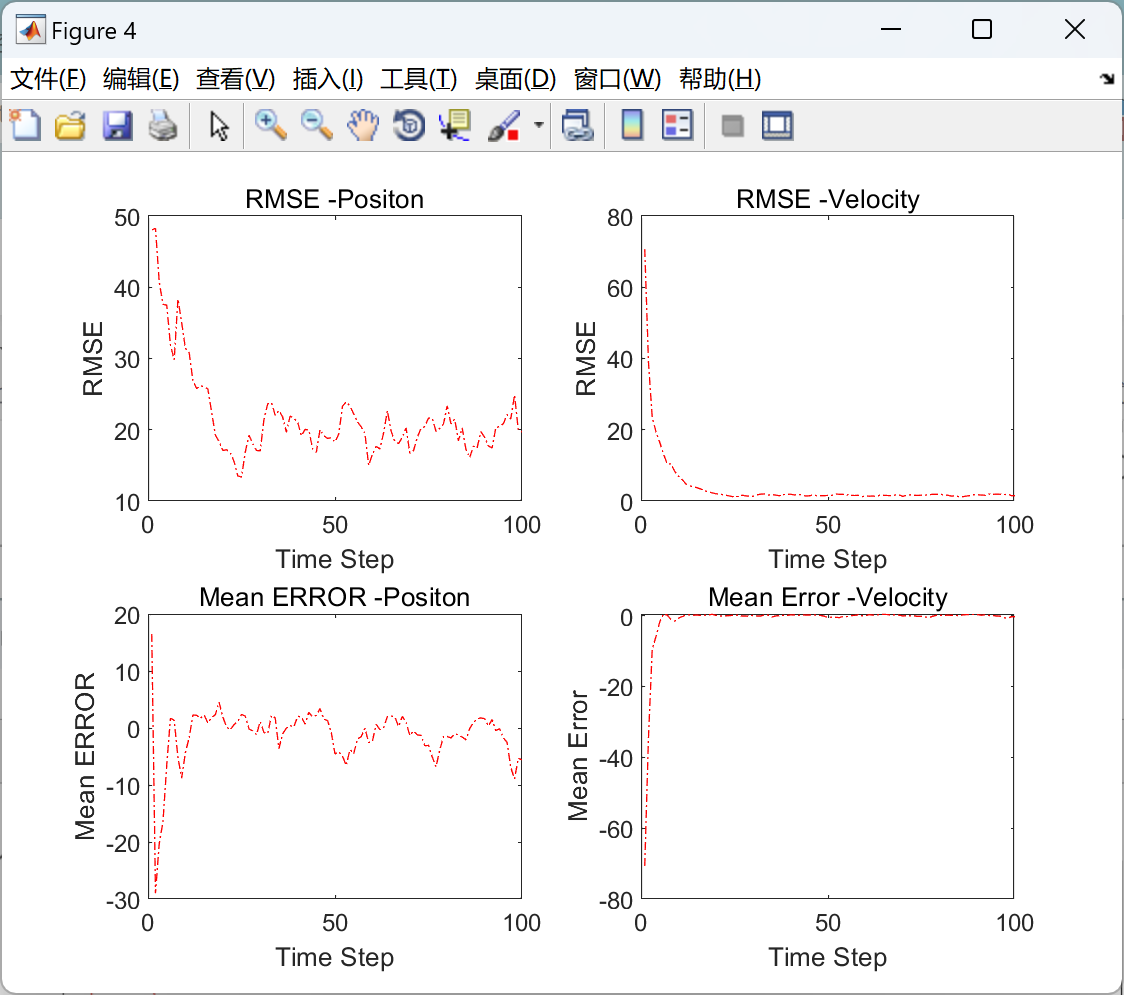
基于卡尔曼滤波的二维目标跟踪是一种常见的目标跟踪方法,利用卡尔曼滤波器对目标的状态进行估计和预测。 卡尔曼滤波是一种递归的状态估计算法,通过融合系统的动态模型和观测数据,实现对系统状态的最优估计。 在目标跟踪中,卡尔曼滤波用于估计目标的位置、速度和可能的加速度等状态变量,并预测目标的未来位置。首先,需要初始化目标的状态向量,包括位置、速度等信息,以及定义卡尔曼滤波器的状态转移矩阵和测量矩阵。通过使用基于卡尔曼滤波的二维目标跟踪算法,可以实现对移动目标的高精度跟踪,为各种应用场景提供可靠的目标定位和预测能力。
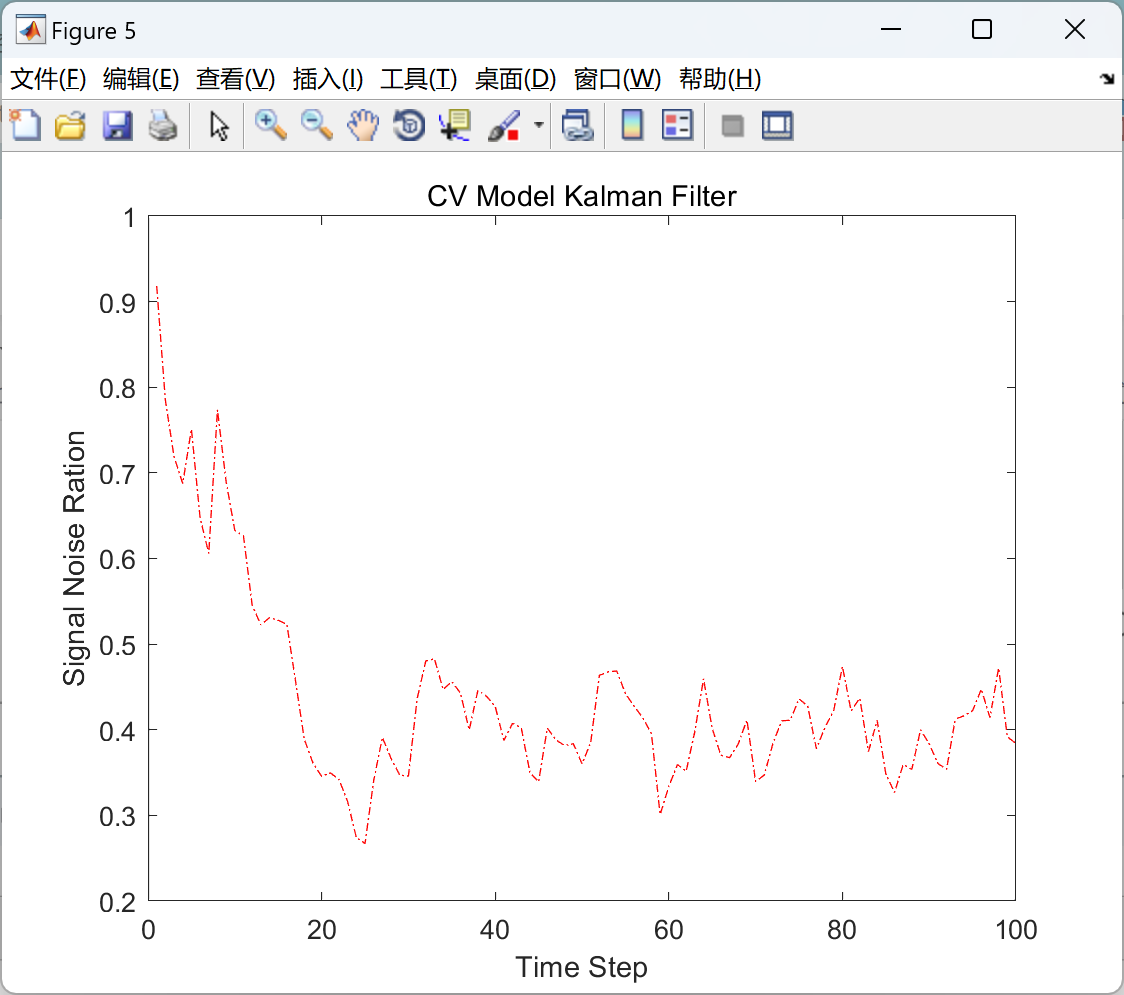
📚2 运行结果
 函数部分代码:
函数部分代码:
% 基于卡尔曼滤波的二维匀速直线运动的目标跟踪
%Test the standard kalman Filter use CV Model,
clear all
close all
T = 1; %sample period
FCV = [1 T 0 0; 0 1 0 0;0 0 1 T;0 0 0 1];
BCV = [T^2/2 0; T 0; 0 T^2/2; 0 T];
QCV = 1; %Model noise covariance
%Run Time
RunTime = 100;
%MontoCarlo Times
MonteCarloTimes = 30;
%True Target Measurement
Z_Init = [0 0]';
V_CV = [50 50]';
A_CV = [0 0]';
for i = 1 : RunTime
Z_Real(1, i) = Z_Init(1,1) + V_CV(1,1) * (T * i);
Z_Real(2, i) = V_CV(1,1);
Z_Real(3, i) = A_CV(1,1);
Z_Real(4, i) = Z_Init(2,1) + V_CV(2,1) * (T * i);
Z_Real(5, i) = V_CV(2,1);
Z_Real(6, i) = A_CV(2,1);
end
%Noise Target Measurement
r = 50;
R = (diag([50 50]))^2;
Noise_Add(1,:) = r * randn(1,RunTime * MonteCarloTimes);
Noise_Add(2,:) = r * randn(1,RunTime * MonteCarloTimes);
for i = 1 : MonteCarloTimes
Run_Start = (1 + (i-1)*RunTime);
Run_End = (i * RunTime);
Z_Noise(1,Run_Start: Run_End) = Z_Real(1,:) + Noise_Add(1,Run_Start:Run_End);
Z_Noise(2,Run_Start: Run_End) = Z_Real(4,:) + Noise_Add(2,Run_Start:Run_End);
end
XCVE = zeros(6,MonteCarloTimes);
%Filter
for i = 1 : MonteCarloTimes
X_Init(1,1) = Z_Noise(1,1 + (i-1) * RunTime);
X_Init(2,1) = Z_Noise(1,1 + (i-1) * RunTime) - Z_Noise(1,1 + (i-1) * RunTime);
X_Init(2,1) = X_Init(2,1)/T;
X_Init(3,1) = 0;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]周玉媛,孙超,谢磊.基于轨迹泊松多伯努利混合滤波器的浅海匹配场连续跟踪方法[J].物理学报,2023,72(18):226-239.
[2]任金瑞. 畸变感知相关滤波目标跟踪研究[D].辽宁工程技术大学,2023.DOI:10.27210/d.cnki.glnju.2023.000117.















 1694
1694











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









