






 本文详细介绍了如何在Windows平台上安装所需环境,从获取相机位姿到训练3DGaussianSplatting模型,并提供可视化工具的使用方法。关键步骤包括安装Python、CUDA,使用COLMAP获取相机数据,以及执行训练和可视化操作。
本文详细介绍了如何在Windows平台上安装所需环境,从获取相机位姿到训练3DGaussianSplatting模型,并提供可视化工具的使用方法。关键步骤包括安装Python、CUDA,使用COLMAP获取相机数据,以及执行训练和可视化操作。
3D Gaussian Splatting
项目github地址:https://github.com/graphdeco-inria/gaussian-splatting
训练3D Gaussian Splatting模型步骤 (以下在windows平台实现):
前置步骤
- 安装python https://www.python.org/
- 安装git https://git-scm.com/
- 安装适合电脑版本的cuda https://developer.nvidia.com/cuda-toolkit
- 拉取项目 在想要放的目录的地址栏输入cmd,然后输入
- git clone https://github.com/graphdeco-inria/gaussian-splatting --recursive
- 或者直接github下载
- 安装anaconda Distribution | Anaconda
- 创建anaconda环境 conda create -n myenv python=3.9 pytorch torchvision torchaudio pytorch-cuda=11.8 -c pytorch -c nvidia
步骤1:记录场景
需要场景的各个角度的图片,推荐100-1000张。数量过少会导致模型质量不够,数量过多会导致过长的训练时间。为了保持更好的效果,每张照片需保持一致的曝光。
准备好照片之后,在项目中新建一个data文件夹,再在data文件夹中新建一个input文件夹,放入照片
步骤2:获取相机位姿
使用COLMAP获取相机位姿,
下载COLMAP并解压 https://github.com/colmap/colmap/releases/tag/3.8
 将解压后的路径加入系统环境变量
将解压后的路径加入系统环境变量
进入到创建好的anaconda环境
- conda activate myenv
及项目目录下输入以下命令获取相机资位
- python convert.py -s data
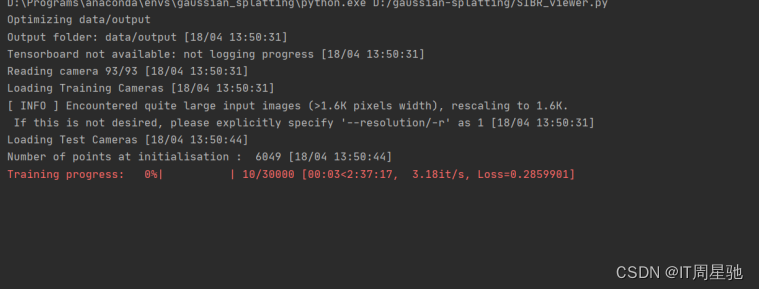
步骤3:训练Gaussian Splatting
在创建好的anaconda环境中安装以下依赖
- pip install plyfile tqdm
- pip install submodules/diff-gaussian-rasterization
- pip install submodules/simple-knn
完成安装后,运行以下命令训练
- python train.py -s data -m data/output
 步骤4:可视化模型
步骤4:可视化模型
下载可视化工具并解压到项目中
- https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/binaries/viewers.zip
通过下列命令运行:
- .\viewers\bin\SIBR_gaussianViewer_app -m data/output


















 2912
2912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









