






基础操作
rosbag2 用于记录ros中的主题,方便后续查看与分析这些数据
bag的录制,使用CTRL+C结束录制,完成后在当前文件夹自动创建了一个rosbag2+日期的新文件夹,包含了.yaml与.db3文件
ros2 bag record /xxx #记录一个主题
ros2 bag record /xxx /xxx /xxx #记录多个主题
ros2 bag record -a #记录所有话题
ros2 bag record -o 文件名 /xxx #制定输出bag的文件名
bag回放命令,按空格可以暂停
ros2 bag info xxx.db3 #查看bag的信息
ros2 bag play xxx.db3 #回放bag
ros2 bag play xxx.db3 /xxx #回放bag中的某个话题
ros2 bag play xxx.db3 -r 2 #-r指定倍率播放
ros2 bag play xxx.db3 -l #循环播放
ros2 bag plagy -s 10 xxx.db3 #跳过一段时间
回放后可以使用ros2 命令操作了
安装plotjuggler
安装bag分析软件包plotjuggler
sudo apt install ros-humble-plotjuggler-ros
ros2 run plotjuggler plotjuggler ##运行
打开软件后电机Data:后面的导入图标导入录制的内容.yaml
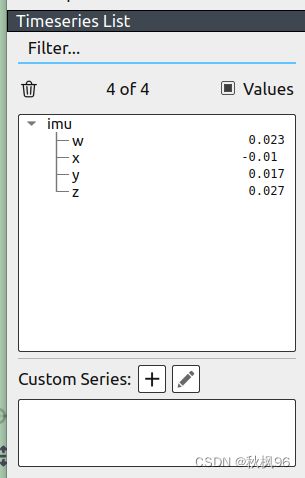
打开bag后列表中会出现记录的数据,然后鼠标左键拖动到右侧的显示框就可以曲线了
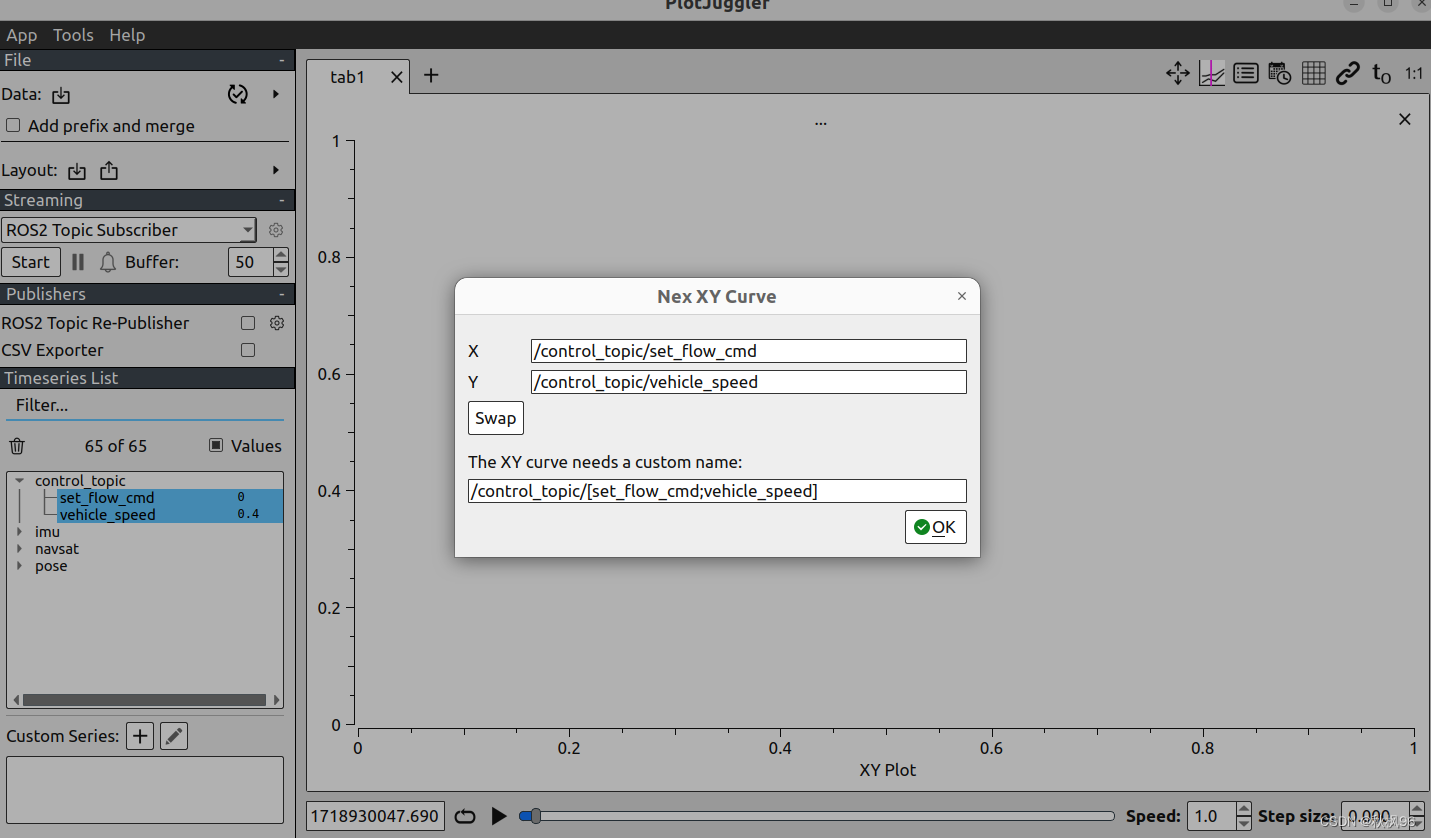
如果要显示两个变量的关联值ctrl选中两个变量,右键拖入显示框。















 4230
4230











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









