







在神经网络中,我们经常会看到池化层,常用的池化操作有四种:mean-pooling(平均池化),max-pooling(最大池化)、Stochastic-pooling(随机池化)和global average pooling(全局平均池化),池化层有一个很明显的作用:减少特征图大小,也就是可以减少计算量和所需显存。
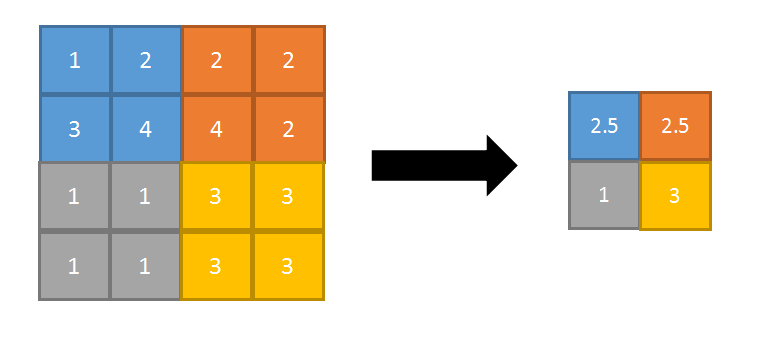
mean-pooling(平均池化):即对邻域内特征点只求平均
优缺点:能很好的保留背景,但容易使得图片变模糊
正向传播:邻域内取平均
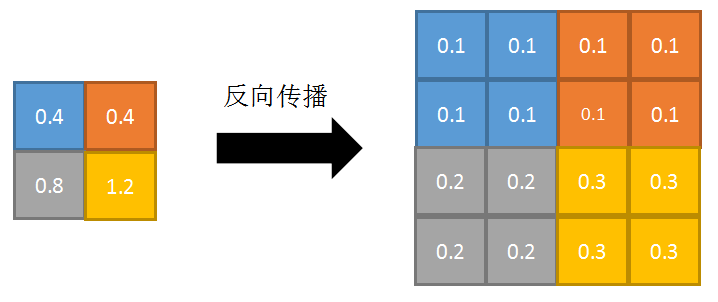
反向传播:特征值根据领域大小被平均,然后传给每个索引位置
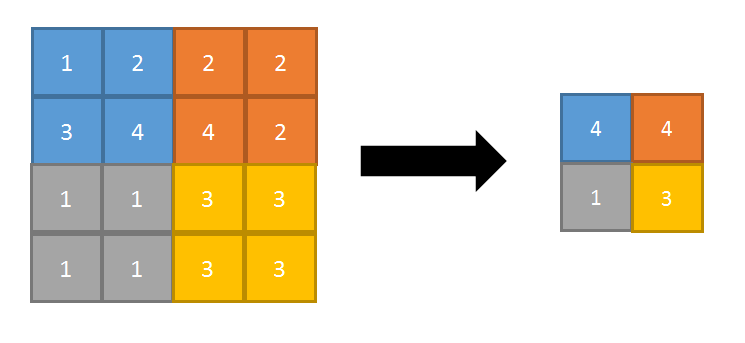
max-pooling(最大池化):即对邻域内特征点取最大
优缺点:能很好的保留纹理特征,一般现在都用max-pooling而很少用mean-pooling
正向传播:取邻域内最大,并记住最大值的索引位置,以方便反向传播
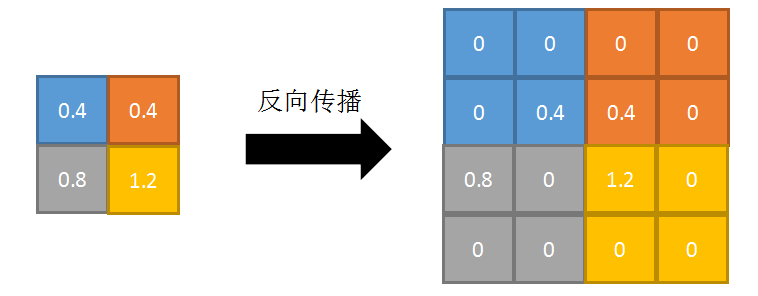
反向传播:将特征值填充到正向传播中,值最大的索引位置,其他位置补0
Stochastic-pooling(随机池化):只需对feature map中的元素按照其概率值大小随机选择,即元素值大的被选中的概率也大。而不像max-pooling那样,永远只取那个最大值元素。
在区域内,将左图的数值进行归一化处理,即 1/(1+2+3+4)=0.1;2/10=0.2;3/10=0.3;4/10=0.4
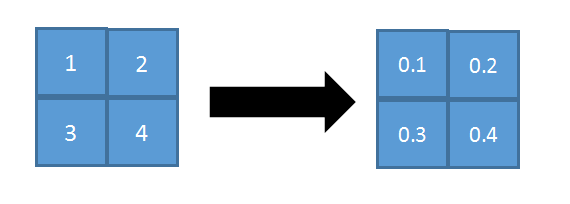
接着按照概率值来随机选择,一般情况概率大的,容易被选择到,比如选择到了概率值为0.3的时候,那么(1,2,3,4)池化之后的值为3。使用stochastic pooling时(即test过程),其推理过程也很简单,对矩阵区域求加权平均即可,比如上面图中,池化输出值为:1*0.1+2*0.2+3*0.3+4*0.4=3。在反向传播求导时,只需保留前向传播已经记录被选中节点的位置的值,其它值都为0,这和max-pooling的反向传播非常类似,具体可以参见上面的max-pooling反向传播原理。
优点:方法简单,泛化能力更强(带有随机性)
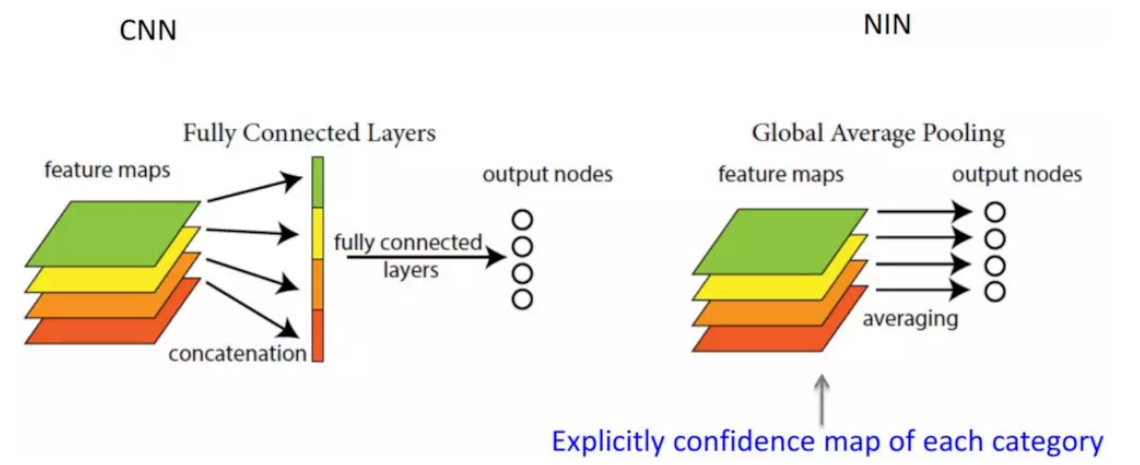
global average pooling(全局平均池化):全局平均池化一般是用来替换全连接层。在分类网络中,全连接层几乎成了标配,在最后几层,feature maps会被reshape成向量,接着对这个向量做乘法,最终降低其维度,然后输入到softmax层中得到对应的每个类别的得分,过多的全连接层,不仅会使得网络参数变多,也会产生过拟合现象,针对过拟合现象,全连接层一般会搭配dropout操作。而全局平均池化则直接把整幅feature maps(它的个数等于类别个数)进行平均池化,然后输入到softmax层中得到对应的每个类别的得分。在反向传播求导时,它的参数更新和mean-pooling(平均池化)很类似,可以参考上面的内容。
优点:大幅度减少网络参数(对于分类网络,全连接的参数占了很大比列),同时理所当然的减少了过拟合现象。赋予了输出feature maps的每个通道类别意义,剔除了全连接黑箱操作。


















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









