






前言
2023年7月11日,给同事做了一次控制基础的培训(其实就是最基础知识的分享),之前花了一些时间学习控制知识,觉得自己稍微了解了一些基础,决定不停下来,通过持续更新这个博客,把控制的基础知识做一个梳理和全景的学习。
网络上优秀的学习资料浩如烟海,我写的肯定是比较差的,但是,因为我是小白零基础,所以写的东西可能也适合小白零基础。与志同道合者一块努力吧!
控制在机电设备开发里是必须要掌握的,不论哪个领域都是,这一点不要侥幸,你是软件,硬件,测试,开发,甚至项目管理,在设备领域做,控制肯定要懂一点才好。对于其他工科领域,控制也无处不在,学学没坏处。
中文伟大,“控制”这个词本身有太多的意思,而这里,主要指的是反馈控制为基础的自动控制,姐妹兄弟我们开始吧。(2023年7月12日早)
更新备注
2023年7月12日早 初稿:完成前言和章节列表
2023年7月13日早 1更:从频率响应法开始写(5.1.1)
2023年7月14日早 2更:开始伯德图小节(5.2)
2023年7月15日早 3更:伯德图(5.2)
2023年7月16日早 4更:伯德图(5.2)+ 奈奎斯稳定判据(5.5)
2023年7月20日早 5更:奈奎斯稳定判据(5.5)
2023年7月26日晚 6更:根轨迹法
2023年7月30日早 7更:根轨迹法
参考文献与资源
- 现代控制工程 第五版 Katsuhiko Ogata 著
- 控制之美[卷一] 王天威 著
- 自动控制原理(第二版)王建辉 顾树生 编(本书只涉及经典控制)
- https://python-control.readthedocs.io/en/0.9.4/
- https://fbswiki.org/wiki/index.php/Main_Page
第1章:基本概念
第2章:动态系统建模
第3章:时域分析
第4章:根轨迹法
4.1引言
线性系统的稳定性完全由它的特征根(闭环极点)决定。系统的品质则取决于闭环极点和零点,根轨迹法就是用开环传递函数求闭环特征根。它是一种用图解方法表示特征根与系统参数的全部数值关系的方法(有时单靠调整增益可以将闭环极点移动到需要的位置,但不到满意的结果的话,增加校正器来解决)。根轨迹法,是一种用图解的方法标着特征根(闭环极点)与系统的某个参数全部的数值关系(通常是开环增益,但是其他参数也是可以的)。当改变增益值或者增加开环极点或/和零点时,设计者可以根据根轨迹法预测对闭环极点的位置的影响。设计系统时,根轨迹法指出了开环极点和零点应当怎样变化,才能使得响应满足系统的性能指标。
第5章:频率响应法
5.1 引言
- 系统对正弦信号的稳定响应称为频率响应。频率响应法做系统分析获得的信息与根轨迹法获得的信息不同,可以说两种方法互为补充,控制工程人员必须熟悉两种方法。
- 频率响应法的优点是:
- 可以利用对物理系统测量得到的数据,而不必推导系统的数学模型。
- 采用正弦信号发生器和精密测量装置,完成频率响应试验比较简单且精确。
- 一些复杂元器件的传递函数也可以通过频率响应试验予以确定
- 可以设计出一种抗噪声干扰的系统(滤波?),不希望的噪声可以忽略不计
- 可以推广到某些非线性系统
- 奈奎斯特稳定判据,使我们有可能根据系统的开环频率响应特性信息,研究闭环系统的绝对稳定性和相对稳定性。
- 注意:控制系统的频率响应提供了瞬态响应的定性描述,但是除了二阶系统,频率响应与瞬态响应的关系是间接的。
5.1.1系统对正弦信号的稳态输出
- 系统的稳态输出可以直接从正弦传递函数得到。
- 正弦传递函数:用jw代替传递函数中的s得到的函数,w为角频率。
- 对于稳定线性定常系统,如果输入量为正弦信号,稳态输出也是一个相同频率的正弦信号,只是振幅和相角有可能不同。
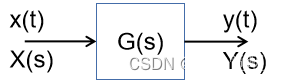
- 如图5.1的系统,假设输入为 x(t)=Xsinwt,它的拉氏变换为公式5.1,考虑G(s)代表的系统是稳定线性定常的(稳态响应与与初始条件无关),则Y(s)有以下两种情况:
- 具有不同的极点(相异极点型)
- 包含重极点(多重极点型)

- 无论是情况1(公式5.2)还是情况2(公式5.3),y(t)在t趋向无穷大时,除了输入的正弦波带来的前两项,其他都会趋于零。


- 最后的稳态输出:

- 经过推导进一步可以得到:

- 相位差(输出-输入)为正,叫相位超前,否则为相位滞后。
- 正弦传递函数作为频率w的复变函数,可以以频率作为参量,用其幅值和相角来描述。以下是三类正弦传递函数的图形表示法:
- 伯德图(对数坐标)
- 奈奎斯特图(极坐标)
- 尼科尔斯图(对数幅相图)
5.2 伯德图
- 伯德图的组成
- 正弦传递函数幅值的半对数坐标图(幅频特性图)
- 正弦传递函数相角的半对数坐标图(相频特性图)
- 伯德图的优点
- 幅值相乘转化为相加
- 建立在渐近线基础上的简便快速绘图
- 可以通过实验确定传递函数
- 任意正弦传递函数的基本因子(
 )
)
- 增益K
- 积分和微分因子

- 一阶因子

- 二阶因子

-
熟悉了上面的因子的半对数坐标图后,就可以对各个单独曲线一一相加,获得任意正弦传递函数的合成半对数坐标图。
-
谐振频率和谐振峰
二阶因子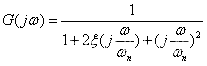 的幅值为
的幅值为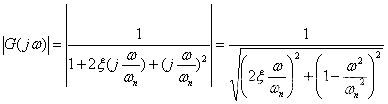 其中
其中  为最小值时,
为最小值时, 达到峰值,设
达到峰值,设 可以看到
可以看到 即
即 的时候为最小值,此时的
的时候为最小值,此时的 为谐振频率。注意
为谐振频率。注意 为系统的阻尼自然频率。比较谐振频率,可以有如下结论:
为系统的阻尼自然频率。比较谐振频率,可以有如下结论:
- 到阻尼比趋近与零时,谐振频率,和阻尼自然频率都趋近与无阻尼自然频率
- 在
 时,谐振频率小于阻尼自然频率
时,谐振频率小于阻尼自然频率 - 当
 时,不产生谐振峰值,幅值随着频率增大而单调减小。
时,不产生谐振峰值,幅值随着频率增大而单调减小。
- 最小相位系统和非最小相位系统
- 在s右半平面既无极点又无零点的传递函数,称为最小相位传递函数。
- 在具有相同的幅值特性的系统中,最小相位传递函数的相角范围是所有系统里最小的。
- 最小相位系统,传递函数有单一的幅值曲线确定,非最小相位系统,则不是(注意,全通滤波器乘以传递函数,不会改变幅值曲线,但会改变相位曲线)
5.3 奈奎斯特图(极坐标)
5.4 尼科尔斯图(对数幅相图)
5.5 奈奎斯稳定判据
- 奈奎斯稳定判据:根据开环频率响应和开环极点,无须求出闭环极点,就可以确定闭环系统的稳定性。
- 考虑如下的闭环系统:
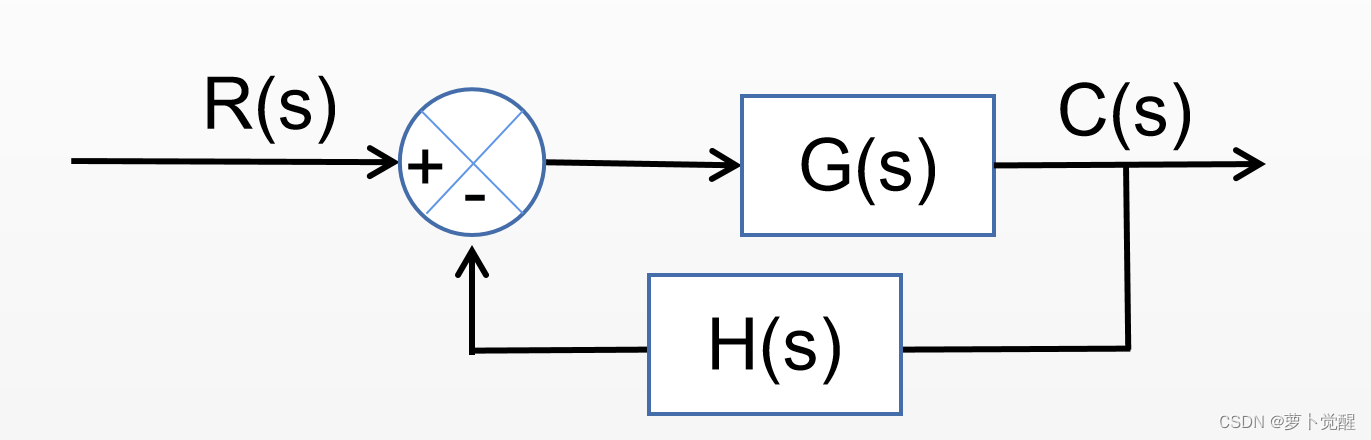
特征方程是:![]() ,闭环系统稳定的前提是特征方程全部的根都要位于s左半平面(开环传递函数
,闭环系统稳定的前提是特征方程全部的根都要位于s左半平面(开环传递函数![]() 的零点和极点可能位于右半平面)。
的零点和极点可能位于右半平面)。

















 2413
2413

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









