







一、准备工作:
有关CUBEMX的初始化配置,参见我的另一篇blog:【STM32+HAL】CUBEMX初始化配置
二、所用工具:
1、芯片:STM32F103C8T6
2、CUBEMX配置软件
3、平衡之家Pendulum
三、实现功能:
1、倒立摆手动起摆
2、自动起摆
四、HAL配置步骤:
1、打开ADC采取角位移传感器数值,并开启DMA

2、打开TIM3读取编码器数值

3、打开TIM8进行5ms定时器中断

4、PWM生成A路

5、PWM生成B路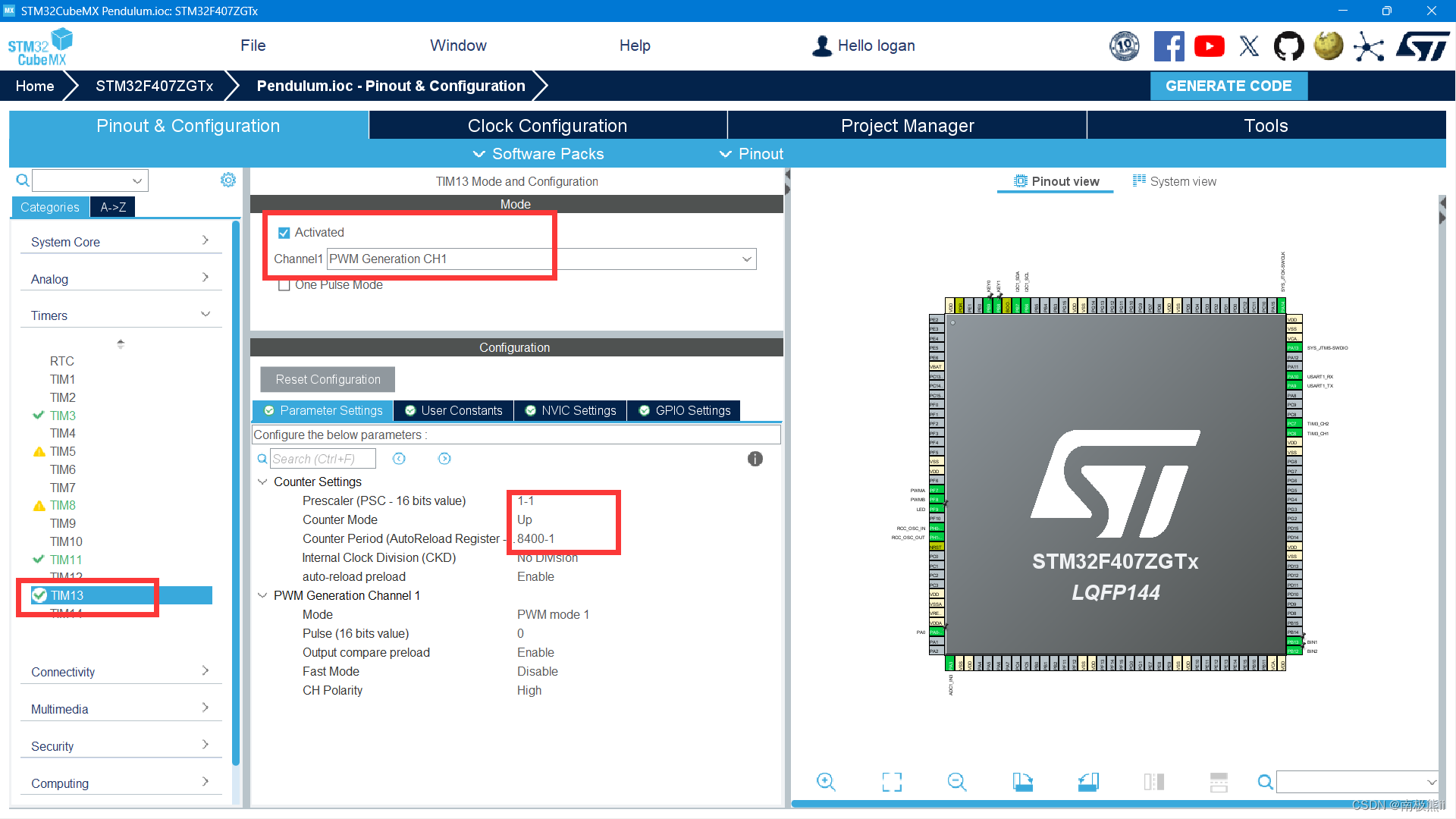
6、打开I2C进行OLED显示

7、中断优先级优化

至此,CUBEMX配置完毕
















 1273
1273











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









