






1、原因
linux动态库路径中找不到*.so共享库
2、解决方法
在/etc/ld.so.conf.d文件夹中有3个.conf文件,将找不到的.so文件路径添加到对应的.conf文件中即可。
具体做法(以我的为例):
1.寻找缺失的so文件路径
tc@tc-vpc:/$ find /opt -name libmoveit_py_bindings_tools.so.1.1.10
/opt/ros/noetic/lib/libmoveit_py_bindings_tools.so.1.1.10
tc@tc-vpc:/$ find /opt -name libeigenpy.so
/opt/ros/noetic/lib/x86_64-linux-gnu/libeigenpy.so
一般这两个都在/opt/ros/noetic/lib和/opt/ros/noetic/lib/x86_64-linux-gnu目录下
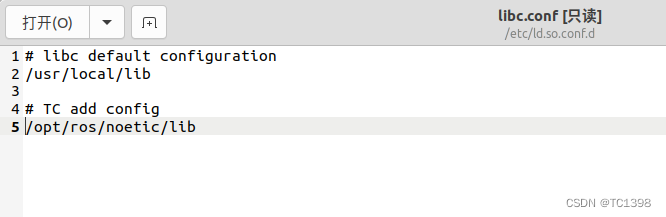
2.添加路径到conf文件中
将上一步找到的路径分别添加在libc.conf 和 x86_64-linux-gnu.conf文件中,如图

3.使新添加的路径生效
tc@tc-vpc:/$ sudo /sbin/ldconfig
网上杂找了很久没找到解决方法,现在解决了,所以顺便记录一下。















 2380
2380











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









