






试用经过训练的模式
1.在图像下拉列表中选择 LastRun.InputImage 。最近一次运行图像的结果会在图像框中显示。
2.点击 运行 按钮。
3.由于你使用的是当前图像作为训练模式(图案),所以工具应该会不出错并且很轻易地找到该模式。
4.点击 结果 选项卡查看工具生成的结果。
5.结果窗格列出在图像中找到的所有特征。你可以检测每个特征的分数、位置和其他结果。
当你选中结果窗格里的一行,相应形状在显示窗格中以蓝色突出显示

-----------------------------------------------------
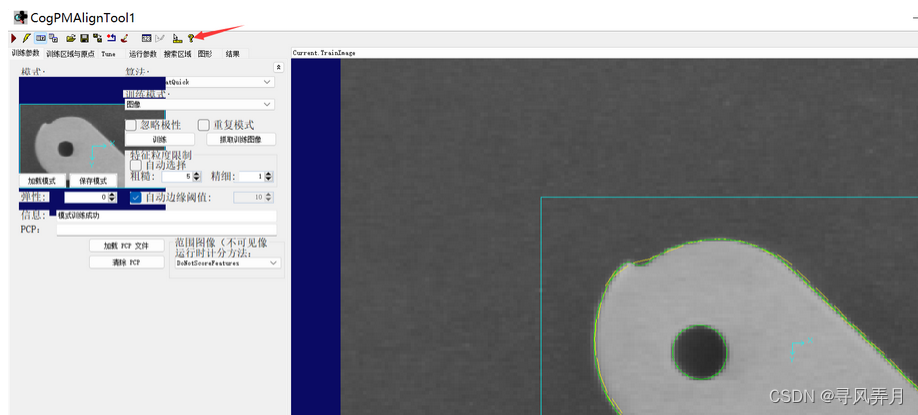
图形
主要作用体现PMAlign工具 按照边缘(图像上不同像素的区域轮廓性 具有大小和方向的矢量)特征 进行匹配计算
1.显示粗糙
2.显示精细

-------------------------------------------------
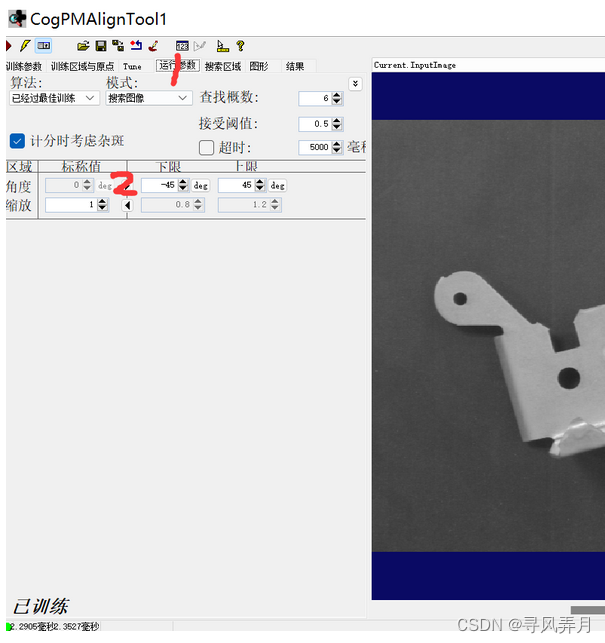
调运行参数
创建和训练模式是告诉PMAlign工具要寻找什么东西。而运行参数是告诉工具如何去发现它。
-
点击允许参数
-
点击角度 箭头,将下限设为-45,上限设为4.5。
该设置允许你选择要查找的目标的相对角度
运行整个作业
现在可以运行整个作业了。关闭 CogPMAlign 工具窗口,或者把它拖到一边,这样就可以看到 QuickBuild作业编辑器了。
1. 点击 Run Job Once(单次运行作业) 按钮。
2. 可以点击 连续运行作业 ,使得QuickBuild获取图像并运行该工具,直到再次点击按钮。
3. QuickBuild会运行整个作业:
1.从图像数据库或相机中获取下一个图像。
2.运行 CogPMAlignTool 发现图像中的下一个目标项。
3.将结果显示在显示窗格中。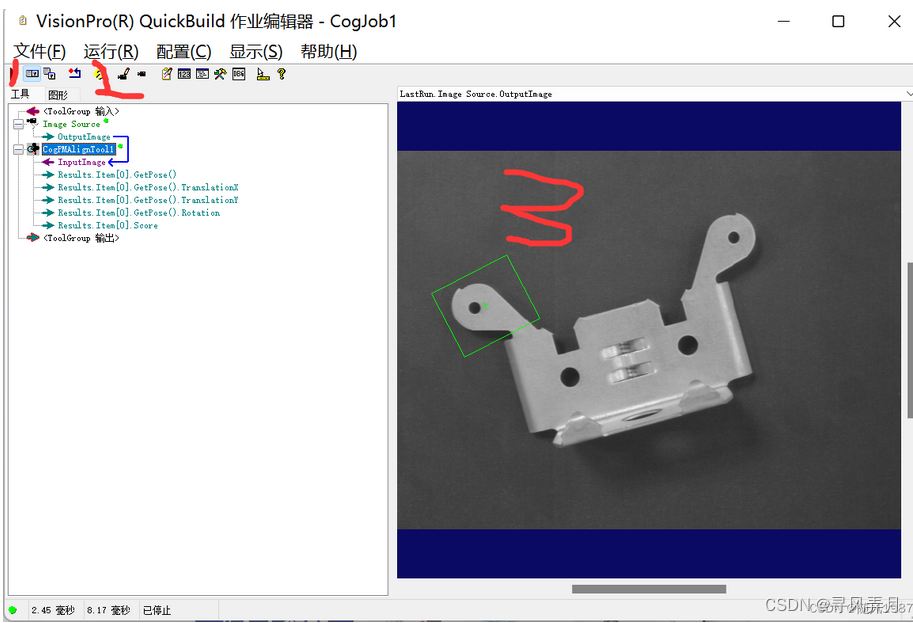
像素和灰度值:
1、像素
像素可以看做是图像中的小方格,图像是由很多的小方格组成,这些小方格都有一个明确的位置和被分配的色彩数值,小方格颜色和位置就决定该图像所呈现出来的样子。
可以将像素视为整个图像中不可分割的单位或者是元素。不可分割的意思是它不能够再切割成更小单位抑或是元素,它是以一个单一颜色的小格存在。
像素是表示的图像的最小单位
2.灰度值
在RGB模型中,如果R=G=B时,则彩色表示一种灰度颜色,其中R=G=B的值叫灰度值,因此,灰度图像每个像素只需一个字节存放灰度值,灰度范围为0-255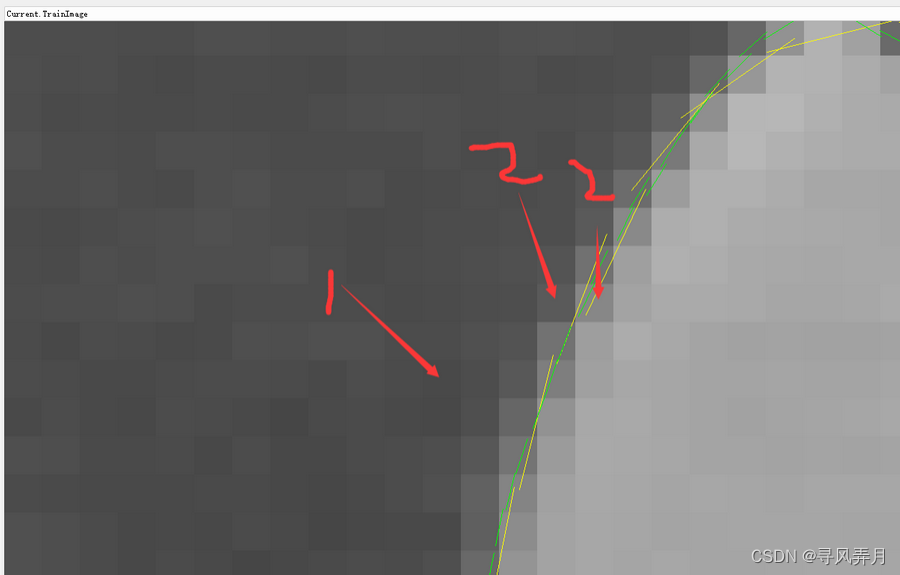
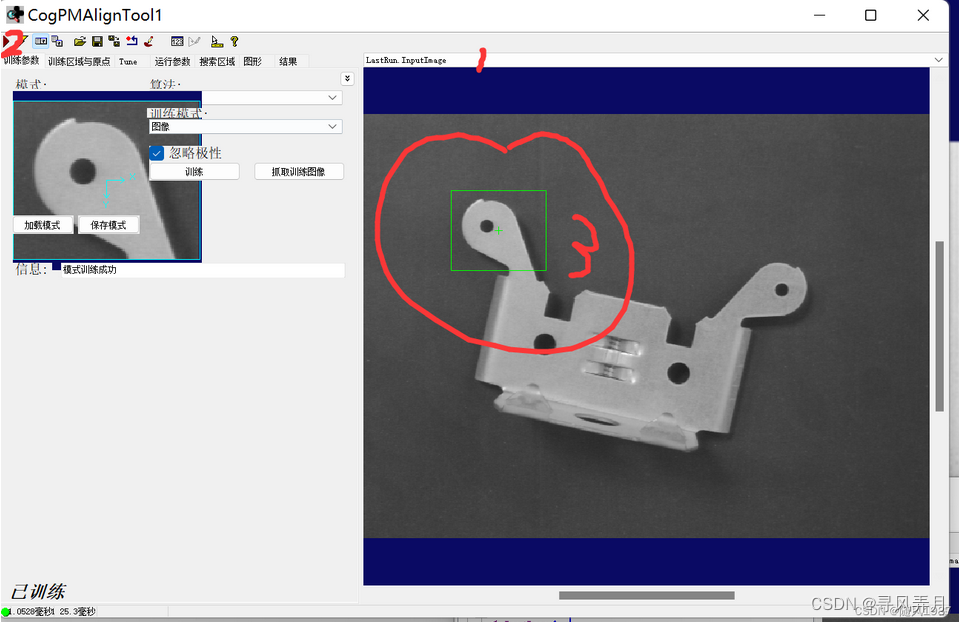
3.勾选 忽略极性 选项。极性 会告诉工具,它应该考虑或忽略图案在亮背景上是暗的还是在暗背景上是亮的。由于该图案在深色背景下是浅色的,根据光线不同,耳朵在背景下可能是深色或浅色。该情况下,忽略极性是正确的做法。
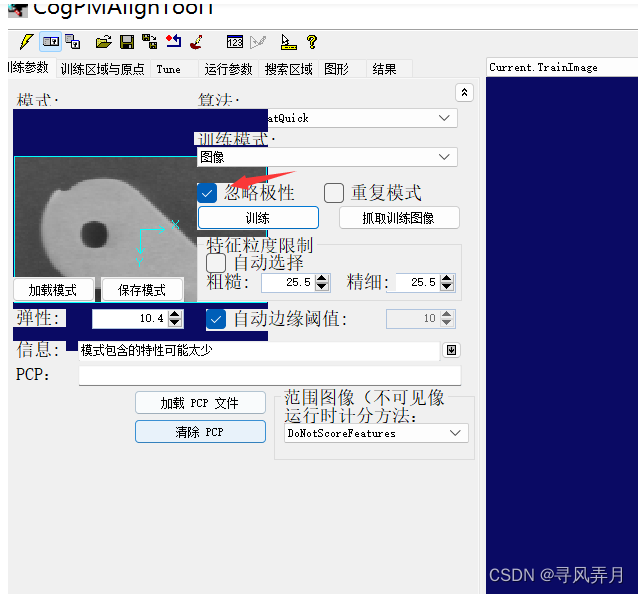
特征颗粒度限制 默认是自动选择 系统会自动设置粗糙精细比例值
上限为25.5 精细 不能大于 粗糙
原则上 数值越大匹配度越低

弹性 影响匹配精确度 类似于范围取值 例如边缘匹配精度为20 弹性设为 1 那么就允许匹配 20.1到21的浮动值
边缘阈值 灰度值之间的差值的界限 阈值越大 匹配精度越低
1.边缘阈值为10 效果

2.1.边缘阈值为80 效果

保存模式 加载模式
可以把匹配好的模板 保存为vpp本地文件 或者打开已保存的vpp本地文件

小tips:
1.帮助按钮 -控制参考页
可以查看工具具体使用文档
保存打开QuickBuild和CogJob

1.查看示例作业 提供很多demo 供参考使用

课程总结
1.如何使用QuickBuild和CogJob
2.PMAlignTool工具操作方法
抓取图像-设置训练区域及参数-训练模板-设置允许参数-运行-参看结果
3.PMAlignTool的基本原理
图案位置搜索工具
基于边缘特征的模板而不是居于像素的模板匹配
边缘特征表示图像中不同区域间界限的轮廓线(有大小有方向)
支持图像中的特征旋转和缩放
PMAlignTool常用参数
1.算法 忽略极性 粗糙度 精细度 边缘阈值 弹性
常用参数总结:
算法:有六种选项,分别是:PatMax,PatQuick, PatMax 与 PatQuick,
PatFlex,PatMax-高灵敏度,透视 Patmax。
PatQuick 特点:速度最快,对于三维或者低质量原件最佳,承受更多图像差异;
PatMax 特点:精确度最高,在二维元件上表现佳,最适合于细微细节;
PatFlex 特点:为高度灵活的图案设计,在弯曲不平的表面表现较佳,及其灵活
但不够精确;
PatMax-高灵敏度特点:适用于对比度很低或者视频噪音或图像变形严重的图像
透视 Patmax 特点:适用于已经历透视失真的二维特征;
忽略极性 从暗到亮 是正极性 从亮到暗是 负极性
进行全局极性的忽略(不考虑明暗关系) 一般用于物体光线不稳定时
xy重叠 如果匹配物体有重合部分 取值范围0-1 数值越大 越能匹配重合部分查找概数 能匹配的物体个数上限
希望查找的结果个数。
如果当前图像有四个待查找的图例。
Case1:设置查找数量为1个。如果四个结果的分数都相等,那么会显示4个结果
Case2:设置查找数量为3个。那么会按照查找分数的从大到小,显示排列前3个的结果接受阈值 结果选项中 分数 低于阈值的不显示结果 一般建议 0.5
计分考虑杂斑
考虑的时候,将会导致结果选项中 分数变低
粗糙度接受阈值法 结果选项中 粗糙 分数 低于阈值的不显示结果弹性:当实例于匹配模板 有一定出入时 (例如匹配模板为30像素 弹性+5 可以匹配到30.1-35的实例) 类似于误差值 一般建议在6以内范围
自动边缘阈值:(可以适当滤除一定的边缘干扰)
低于边缘阈值的会当作物件的背景。大于阈值的才会视作物件的轮廓。(边缘对比度)
如果设置一个过小的阈值,那么会产生过多的干扰
设置一个过大的阈值,将会造成边缘轮廓的损失
特征颗粒限制:
模板 边缘线段的颗粒限制旋转角度和缩放比例
实例与模板之间 可 接受的最小和最大角度值
实例与模板之间 可 接受的最小和最大缩放比例超时:
强制让当前搜索的任务时间限制到这个时间之内,超过就会直接结束
对比度阈值 我们将刚好看不清物体时的对比度值,称为对比度阈值。对比度阈值的倒数就是视觉对比敏感度。对比度阈值越低,对比敏感度越高,视觉功能越好。
————————————————
版权声明:本文为CSDN博主「随风1987」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qqku321/article/details/132885525














 328
328











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









