







VisionPro笔记
1、CogPMAlignTool的操作方法:
抓取图像-设置训练区域及参数-训练模板-设置运行参数与区域-运行-查看结果
2、CogPMAlignTool的基本原理:
- 图案位置搜索工具(识别+定位)
- 基于边缘特征的模板而不是基于像素的模板匹配
- 支持图像中特征的旋转与缩放
- 边缘特征表示图像中不同区域间界限的轮廓线(有大小和方向)
3、CogPMAlignTool的参数介绍
- 训练参数:算法、忽略极性、粗糙度、精细度、边缘阈值、弹性
- 保存、加载模板
- PatMax定位精度达到1/40像素
4、CogPMAlignTool的运行参数:
接受阈值、粗糙阈值、查找概数、计分时考虑杂斑、超时、自由度、模式粒度、XY重叠对比度阈值、自动边缘阈值
5、掩膜器使用方法:
用紫红色遮挡住不稳定特征
6、建模器使用方法:
忽略极性、可以设置特征权重比例
7、CogPMAlignTool:
基于边缘特征模板进行定位,而不是基于像素特征模板进行定位,支持图像中特征的旋转和缩放
8、CogPMAlignMulitTool:
基于CogPMAlignTool,可以建立多个模板
9、CogCNLSearchTool:
基于像素值模板进行匹配定位,不支持旋转和缩放,但是速度快
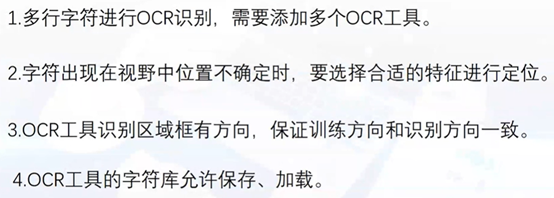
10、CogSearchMaxTool:
该工具综合了PMAlign和CNLSearch工具的特点
11、CogFixtureTool操作方法:
建立基于图像自身特征的定位坐标空间
12、

13、CogCaliperTool俩类基本使用方法:
- 测量距离
- 计数
14、创建工具Geometry-Creation:
- 创建圆
- 创建椭圆
- 创建标签
- 创建俩点连线的中垂线
- 创建一条直线过某点的平行线
- 创建一条线过某一条的垂线
- 创建直线
- 创建俩条线段的中分线
- 创建线段
15、查找与拟合工具Geometry-Finding&Fitting:
- 查找圆、线、角;参数设置:位置、卡尺个数、搜索长度、方向、投影长度、卡尺设置、忽略点数、拟合误差等
- 拟合圆、椭圆、线
16、

17、校准的基本方法与过程:
- 架设好图像采集系统,固定相机、镜头、光源等器件
- 选择合适的标定片,放置到视野下,采集1张清晰的图像
- 将标定板照片,导入校准工具(CogCalibCheckerboard),设置参数计算标定
注意: - 标定完成后,系统相机、镜头不允许更换其他型号
- 工作距离不允许调整
- 保证标定片放置高度和实际产品高度一致
18、CalibCheckerboard工具的基本功能:
基本作用:
- 实现像素和真实单位(mm)之间的转换
- 可以计算线性或者非线性转换,非线性准换说明存在光学或者透视扭曲
19、Blob操作步骤及功能:
- Blob功能用于查找和分析图像中的各种形状
- Blob是先根据用户设定好的灰阶范围对图像进行分割,然后对目标进行查找和分析
- Blob结果报告多种属性:面积、质心、周长、主轴…
20、Blob运用场景:
适用场景:
- 对象在尺寸、形状、方向上有很大差异(很难或不可能训练模型)
- 在背景中没有明显灰度阴影的对象
- 对象没有重叠或者连接
典型应用案例:
- 检测点胶的数量,尺寸,形状
- 检测不良晶元上墨水点的位置和大小
- 监测药片的破碎及大小
- 根据对象的大小,形状和位置进行排序和分类
21、Blob使用时通常分为分割和分析俩步。分割就是第一步,将Blob区域找出来。
Relative Hard Thresholding----固定阈值分割:无法适应光线变化


22、
23、







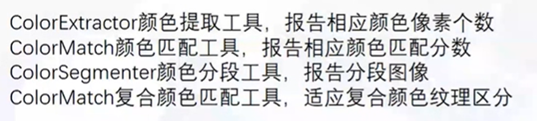
24、了解4种颜色工具的差异:
















 883
883











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









