






 本文详细介绍了Ubuntu18.04系统安装后如何进行阿里源更换,以提升软件更新速度。接着,通过一键安装命令轻松配置ROS环境,并提供了ROS的验证方法。此外,还讲解了如何同步Ubuntu与Win10双系统的时钟,以及在Ubuntu18.04中安装搜狗拼音输入法的修复步骤,确保在双系统下正常使用。
本文详细介绍了Ubuntu18.04系统安装后如何进行阿里源更换,以提升软件更新速度。接着,通过一键安装命令轻松配置ROS环境,并提供了ROS的验证方法。此外,还讲解了如何同步Ubuntu与Win10双系统的时钟,以及在Ubuntu18.04中安装搜狗拼音输入法的修复步骤,确保在双系统下正常使用。
一、安装ubuntu18.04系统之后第一步:换源!!!!
由于一些原因,当我们用官网的源的更新和下载包的时候,很慢、很卡、很费时间。 所以,我们应该把它换成国内的源。这里我们选择国内阿里源
先下载gedit
sudo apt install gedit之后进行换源,进入sources.list
sudo gedit /etc/apt/sources.list将下面的东西复制进去,不要遗漏!
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse如果是20.04版本,则更换为:(仅需复制,不需要把原来的删掉)
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
保存退出,更新软件列表,打开终端输入:
sudo apt update二、一键安装配置ros环境
ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它具备通讯机制,开发工具,应用功能,生态系统四大功能。
这里我们采用鱼香ROS一键安装命令,下面网站为鱼香ROS官网
http://fishros.com/#/fish_home打开终端输入如下一键安装命令:(输入命令之后,会要求输入装系统时设定的密码)
wget http://fishros.com/install -O fishros && . fishros之后会出现
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
[11]:一键安装:ROS+Docker(支持所有版本ROS/ROS2)
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[6]:一键安装:nodejs
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[9]:一键安装:Cartographer(内测版v0.1)
[10]:一键安装:微信(可以在Linux上使用的微信)
[77]:测试模式:运行自定义工具测试
[0]:quit
请输入[]内的数字以选择:
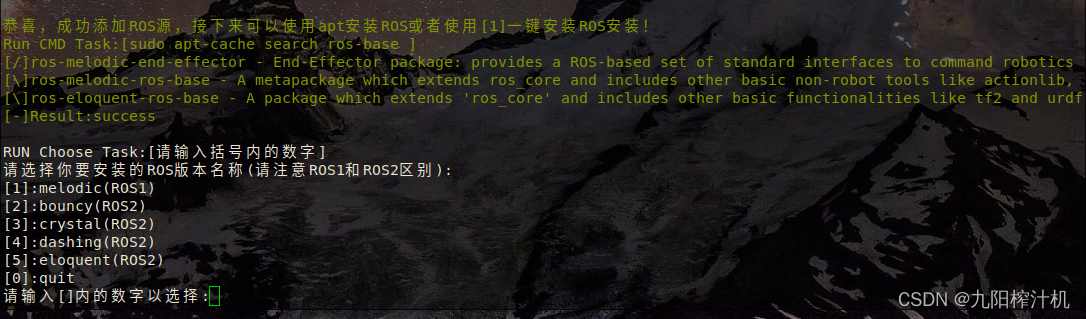
这里我们选择1,回车一下!
之后会出现
RUN Choose Task:[请输入括号内的数字]
首次安装一定要换源并清理三方源,换源!!!系统默认国外源容易失败!!
[1]:更换系统源再继续安装
[2]:不更换继续安装
[0]:quit
请输入[]内的数字以选择:
这里如果我们做完了第一步换源之后,我们直接选择2,回车一下!
选择1,回车!

继续选择1,回车一下!

现在安装成功即可,这里因为我之前已经安装了,所以显示系统已经有了一个ROS环境。
之后输入命令
roscore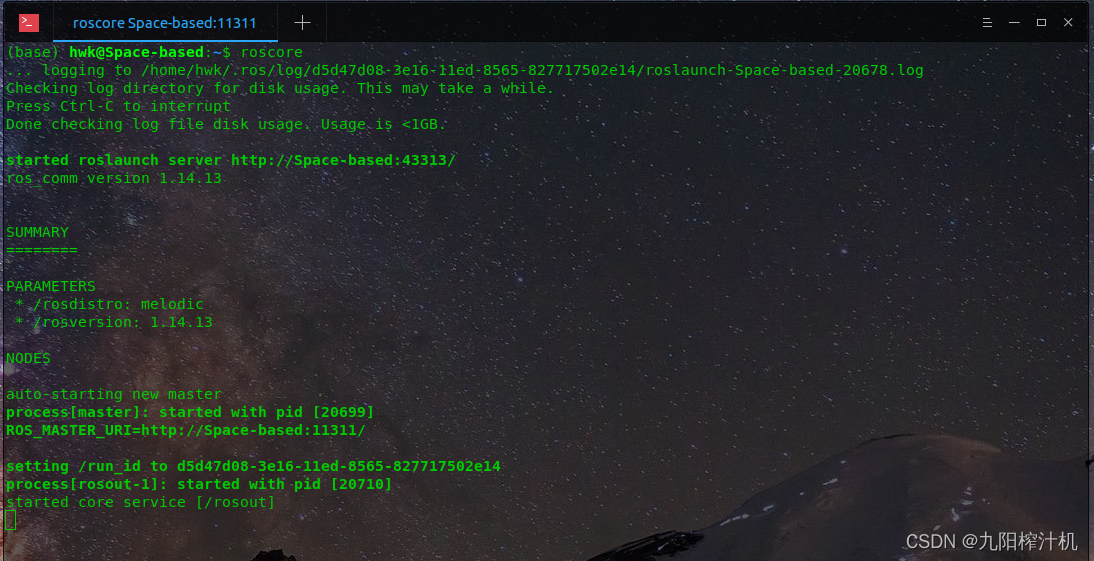
显示如上图即说明ros安装成功!
三、解决Ubuntu18.04和Win10双系统系统时间时间不同步
sudo apt-get install ntpdate // 安装ntpdate
sudo ntpdate time.windows.com // 设置校正服务器
sudo hwclock --localtime --systohc // 设置硬件时间为本地时间
sudo reboot // 重启
四ubuntu18.04 安装搜狗拼音输入法(此处选用搜狗V2.3版本,考虑到部分笔记本ubuntu系统不兼容搜狗V3/4版本)
win10+Ubuntu18.04双系统
如果按照按照官网的教程直接安装,大概率安装好以后是无法使用的,可尝试如下方法修复。
打开终端输入以下命令(注意带序号的中文步骤不需输入):
1.先卸载掉fcitx,及其所有相关的软件:
sudo apt -y --purge remove fcitx
sudo apt clean fcitx
2.然后安装:
sudo apt -y install fcitx fcitx-bin fcitx-table fcitx-table-all
sudo apt -y install fcitx-config-gtk
sudo apt -y install fcitx-libs libfcitx-qt0 libopencc2 libopencc2-data libqt4-opengl libqtwebkit43.下载搜狗拼音:
注意:只能下载2.3版本(或者其他2.x版本)的,不要下载官网3.x或者4.x版本,不然安装了也用不了,这是最关键的一点,切记!!!(打开或搜索以下网址即可自动下载,安装包默认下载到文件下载分区中)
http://cdn2.ime.sogou.com/dl/index/1571302197/sogoupinyin_2.3.1.0112_amd64.deb4.安装搜狗拼音:
打开终端,输入以下命令:
cd ~/下载
sudo dpkg -i sogoupinyin_2.3.1.0112_amd64.deb
如果安装失败,请执行如下命令安装依赖,然后再执行上面的安装命令
sudo apt -f install5.安装完以后,重启电脑,并打开Fcitx Configure,添加搜狗输入法



只留下面这两个输入法,且顺序需要一致
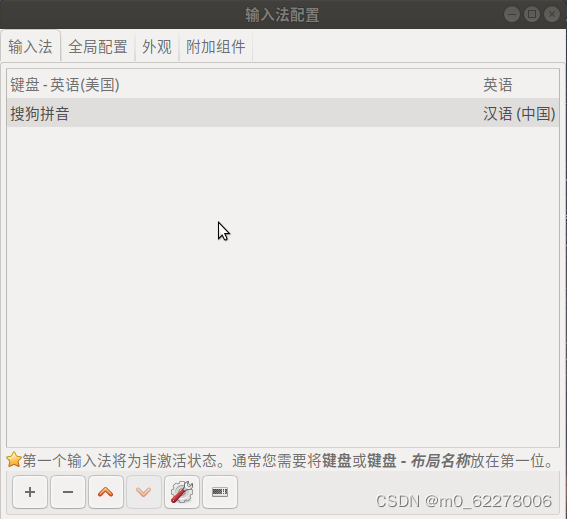
最终效果图


















 2725
2725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









