







实际上,PLL的瞬态行为总体上是非线性过程
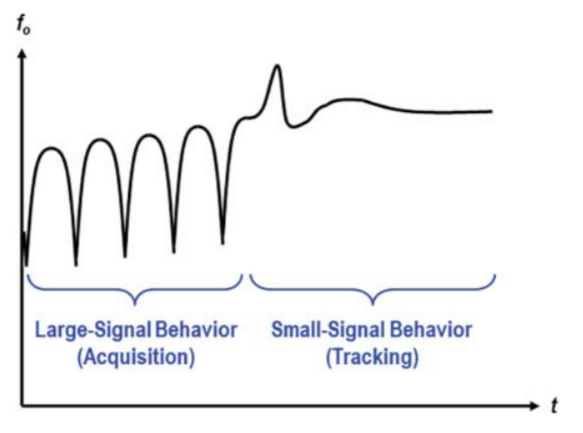
简化瞬态分析,将瞬态行为建立分为两部分:
- 大信号,频率采集
- 小信号,频率/相位跟踪
区分标准,是否发生周跳。
当PLL的初始频率在锁定范围之外时,PLL表现出具有周跳的大信号行为。
大信号区的频率捕获是一个非线性过程,这使得难以分析PLL的性能。一旦PLL进入锁定范围,便可使用线性模型简化瞬态分析。
- PLL频率捕获需要很长时间,实践中需要采样辅助电路。VCO大多被设计具有预调谐功能。
- PFD=相位检测+频率捕获
- 三阶或更高阶的2型PLL的瞬态特性与二阶2型PLL的瞬态特性相差不大
线性瞬态性能
- 线性瞬态响应中的一个重要设计度量是静态相位误差
- 环路类型比阶数更重要
- 常用2型PLL
稳态相位响应
考虑PLL三种不同输入条件下,相位响应:
- 相位阶跃
- 频率阶跃
- 频率斜坡
闭环传递函数:
误差传递函数:
时域稳态相位误差,根据拉普拉斯终值定理,
稳态相位响应误差推导
| 输入误差 | 输出结果 | |
| 相位阶跃 | ||
| 频率阶跃 |
| |
| 输入频率斜坡 | 频率随时间变化斜率为 |
| 相位阶跃 |
|
| 频率阶跃 |
|
| 频率斜坡 |
|
静态相位误差总结
| Type 1 | Type 2 | |
| 相位阶跃 | 0 | 0 |
| 频率阶跃 | 0 | |
| 频率斜坡 |
- 频率步进实现零静态相位误差对频率产生系统具有重要意义。
- 在基于PLL的频率合成器中,需要从单个参考源产生多个输出频率,而不会引起大的静态相位误差。
- 在收发器系统中,通过通信信道在发射器和接收器之间存在频率偏移。
- 当使用基于PLL的时钟和数据恢复(CDR)电路时,在没有静态相位误差的情况下跟踪频率差对于数据重定时是重要的。
- 处理频率斜坡不是这些应用的主要问题。因此,在大多数商业应用中,第2类PLL已占主导地位
瞬态相位响应
- PLL瞬态响应的数学推导并不能给电路设计者带来很多启示。
- 依靠瞬态仿真是直观了解PLL建立的可靠方法
- 3阶PLL建立行为与2阶2型PLL相似,了解2阶2型PLL,可以更好了解3高阶PLL行为
1阶PLL瞬态模型
相位阶跃:
频率阶跃:
假设F(s)=1
2阶1型PLL
假设,为了简单起见,没有零点
假设,则
建立时间
尽管瞬态分析很复杂,但利用一阶近似可以大大简化锁定范围内的稳定行为的分析
对于环路增益为K的1阶PLL,瞬态频率 f(t)
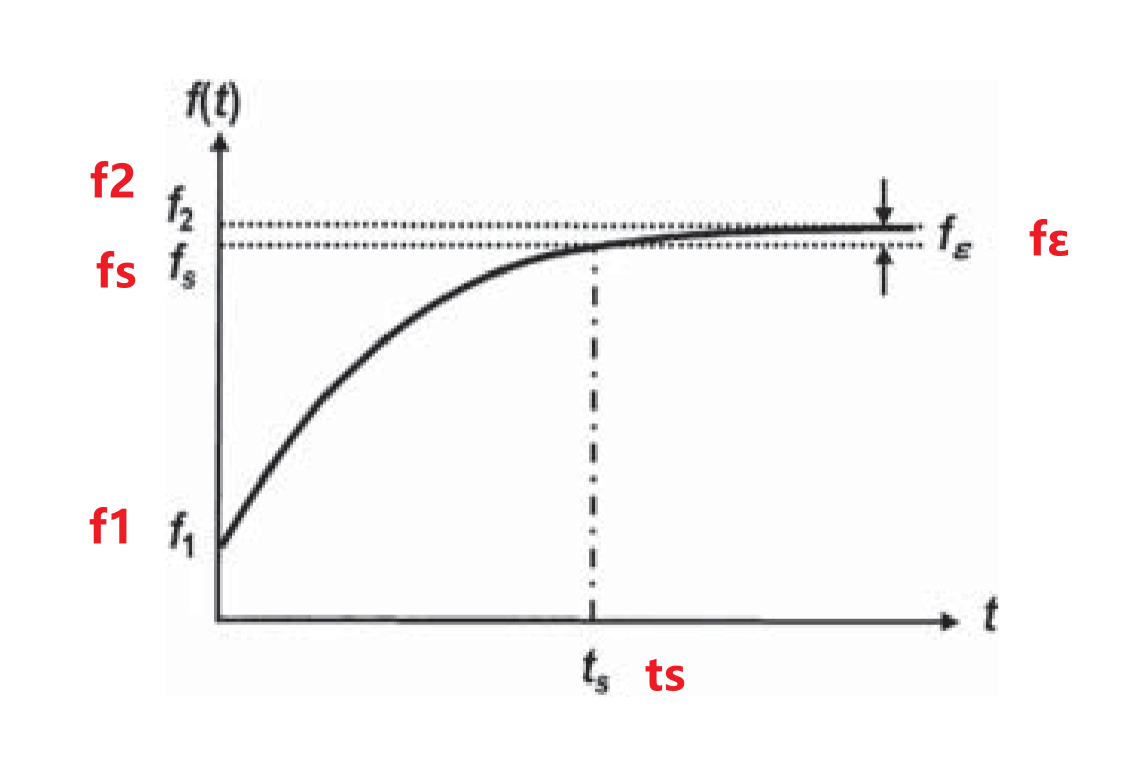
- 初始频率:
- 想要的频率:
- 频率步进:
- 稳定后的频率:
- 频率误差:
- 建立时间:
2阶2型PLL受3个因素影响,,且
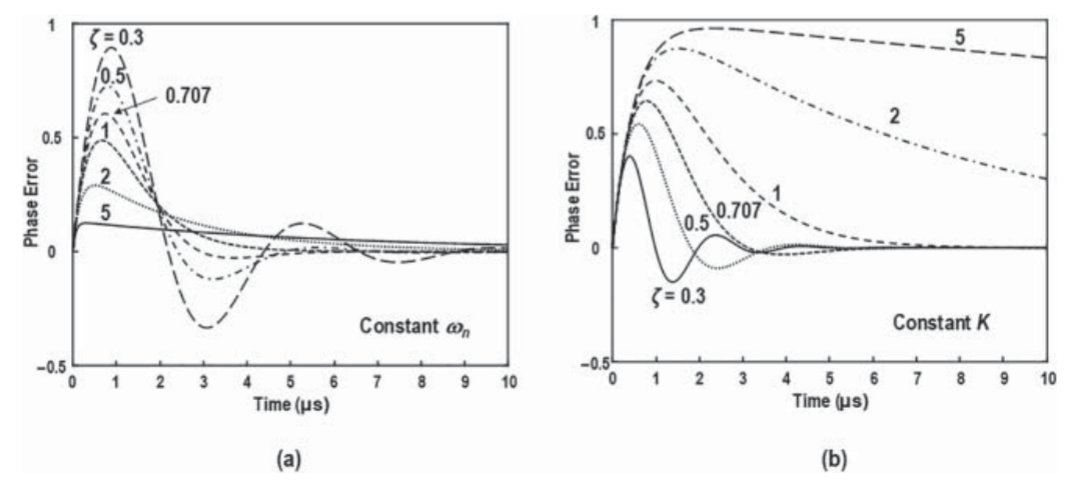
(a)固定
- 变化 ζ,过冲变化大,锁定时间变化不大
(b)固定K
- ζ>1,随着K的增大,锁定时间明显变大
- 欠阻尼环路,有利于快速锁定
- 建立时间主要由积分路径的慢频率采集决定
- 过阻尼环路情况下,2阶2型PLL积分路径,使建立时间滞后。
- 环路增益K,比 固有频率wn更重要
- 在ζ确定情况下,对环路增益归一化很重要
实际应用中,ζ在0.35~0.5,欠阻尼2阶2型PLL建立时间近似为:
在现代PLL设计中,建立时间不仅取决于环路动态特性,还取决于VCO中心频率的数字校准


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









