







最近在用C语言写基于广播星历的北斗卫星轨道计算,采用轨道根数为16和18两种方式,特在此记下,方便之后学习的同学。
一、16参数卫星轨道计算
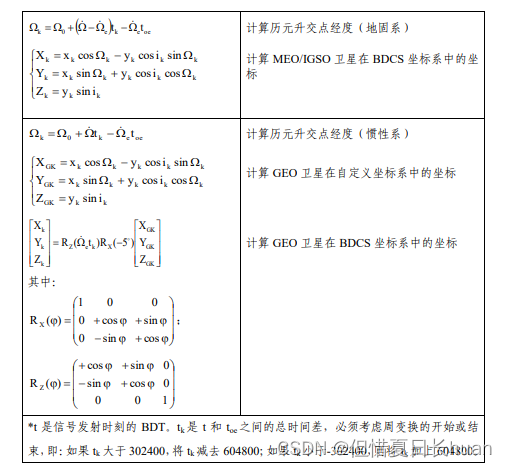
我们首先来看一下计算公式。
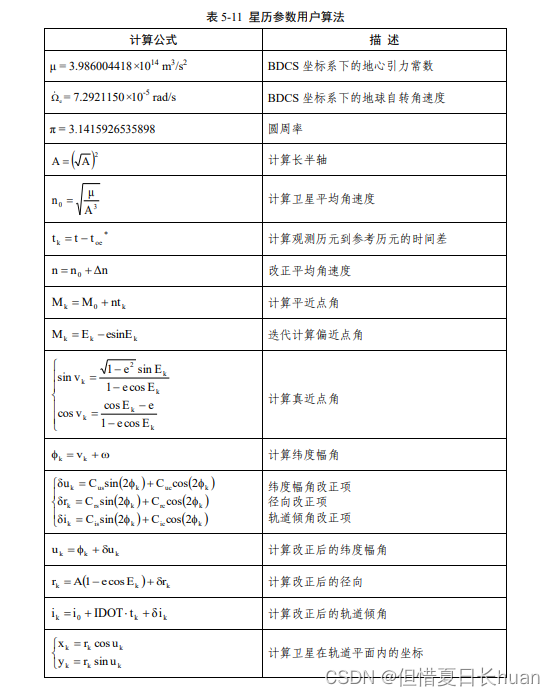
分为MEO/IGSO卫星和GEO卫星
我使用的数据文件的名字为 BRDM00DLR_S_20231520000_01D_MN.rnx
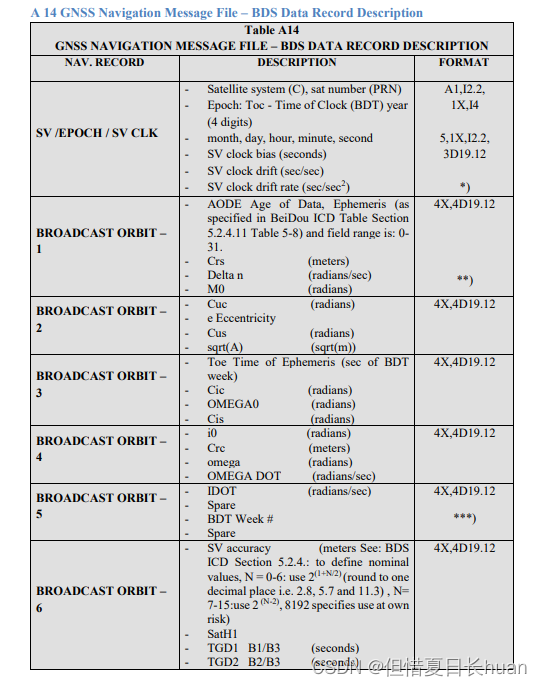
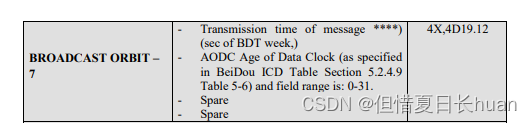
16参数位置如下,为RINEX3.04标准(广播星历格式),按下表读取我们需要的参数。
采用的Dev C++编写的C代码,粘贴在下方
#include<stdio.h>
#include<stdlib.h>
#include<math.h>
#include<string.h>
#define MAX_DATA_SIZE 300000
const double GM = 3.986005e+14,we = 7.292115e-05,pi = 3.1415926;
typedef struct
{
int year; //年
int month; //月
int day; //日
int hour; //时
int minute;//分
double second;//秒
}Time;
typedef struct
{
char name[10];
}Parameter;
double UTC2BDST(int year, int month, int day, int hour, int minute, double second, double *secondOfweek)
{
double JD, WN;
if (month <= 2)
{
year -= 1;
month += 12;
}
JD = 365.25 * year + (int)(30.6001 * (month + 1)) + day + 1720981.5 + hour / 24.0 + minute / 1440 + second / 86400 ; // 计算儒略日
WN = (int)((JD - 2453736.5) / 7) ; // WN:GPS_week number 目标时刻的GPS周
*secondOfweek = (int(JD - 2453736.5) - (7.0 * WN)) * 24 * 3600.0 ; // tGPS:目标时刻的GPS秒 减去14秒为BDT
}
double UTC2BDS(int year, int month, int day, int hour, int minute, double second, double *secondOfweek)
{
int DayofYear = 0;
int DayofMonth = 0;
for (int i = 2006; i < year; i++)
{
if ((i % 4 == 0 && i % 100 != 0) || i % 400 == 0)
DayofYear += 366;
else
DayofYear += 365;
}
for (int i = 1; i < month; i++)
{
if (i == 1 || i == 3 || i == 5 || i == 7 || i == 8 || i == 10 || i ==12)
DayofMonth += 31;
else if (i == 4 || i == 6 || i == 9 || i == 11)
DayofMonth += 30;
else
{
if ((year % 4 == 0 && year % 100 != 0) || year % 400 == 0)
DayofMonth += 29;
else
DayofMonth += 28;
}
}
int Day;
Day = DayofMonth + day + DayofYear-1;//2006年1月1日起始历元
*secondOfweek = Day % 7 * 86400 + hour * 3600 + minute * 60 + second;
return *secondOfweek;
}
void FigureOut(FILE *file,FILE *FileWrite)
{
int data_count = 0;
int EphemerisData[MAX_DATA_SIZE];
char ReadPath[50] = "E:\\Buffer\\data_16.txt";
char WritePath[50] = "E:\\Buffer\\result_16.txt";
file = fopen(ReadPath,"r");
FileWrite = fopen(WritePath,"w");
if(!file||!FileWrite)
{
printf("open the file error!\n");
}
Time time;//年月日时分秒
Parameter para;
double a0, a1, a2;//钟差 钟速 钟漂
double IODE, Crs, Delta_n, M0;//星历数据龄期 轨道半径的正弦调和项 平均角速度摄动量 Toe时刻的平近点角
double Cuc, e, Cus, sqrt_a;//纬度幅角的余弦调和项 轨道偏心率 纬度幅角的正弦调和项 轨道长半径的平方根
double toe, Cic, OMEGA_0, Cis;//星历表参考历元 轨道倾角的余弦调和项 升交点赤经 轨道倾角的正弦调和项
double i0, Crc, w, OMEGA_DOT;//轨道倾角 轨道半径的余弦调和项 近地点角距 升交点赤经变化率
double IDOT, cflgl2, weekno, pflgl2;//轨道倾角变化率 电文来源 BDS的整周计数 长半轴变化率
double svacc, svhlth, tgd, IODC;//卫星精度 卫星自主健康标识 TGD1星上设备时延差 TGD2星上设备时延差
double xxx1,xxx2;
char name[5];
double secondOfweek1, secondOfweek2, secondOfweek;
double n, n0, t_observe, t, tk , Delta_t, toc, Mk, Ek, Vk, fai_k;
double _6u, _6r, _6i, uk, rk, ik, Xk, Yk, E0, E1;
double OMEGA_k, X_obs_k, Y_obs_k, Z_obs_k, X__obs_k, Y__obs_k, Z__obs_k;
while(1)
{
if(feof(file))
{
printf("文件读取结束");
break;
}
fscanf(file,"%s",&name);
//printf("%s\n",name);
fscanf(file, " %d %d %d %d %d %lf %lf %lf %lf",&time.year,&time.month,
&time.day,&time.hour,&time.minute,&time.second,&a0, &a1, &a2);
//printf(" %d %d %d %d %d %.20lf %.20lf %.20lf %.20lf \n", time.year, time.month,
//time.day, time.hour, time.minute, time.second, a0, a1, a2);
fscanf(file, " %lf %lf %lf %lf ", &IODE,&Crs,&Delta_n,&M0);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", IODE, Crs, Delta_n, M0);
fscanf(file, " %lf %lf %lf %lf ", &Cuc, &e, &Cus, &sqrt_a);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", Cuc, e, Cus, sqrt_a);
fscanf(file, " %lf %lf %lf %lf ", &toe, &Cic, &OMEGA_0, &Cis);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", toe, Cic, OMEGA_0, Cis);
fscanf(file, " %lf %lf %lf %lf ", &i0, &Crc, &w, &OMEGA_DOT);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", i0, Crc, w, OMEGA_DOT);
fscanf(file, " %lf %lf %lf %lf ", &IDOT, &cflgl2, &weekno, &pflgl2);
//printf(" %.20lf \t %.20lf \t %.20lf \t %.20lf \n", IDOT, cflgl2, weekno, pflgl2);
fscanf(file, " %lf %lf %lf %lf ", &svacc, &svhlth, &tgd, &IODC);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", svacc, svhlth, tgd, IODC);
fscanf(file, " %lf %lf ", &xxx1, &xxx2);
//printf(" %.10lf \t %.10lf \n", xxx1,xxx2);
/*计算卫星运行的平均角速度n*/
n0 = sqrt(GM)/pow(sqrt_a,3);
n = n0 + Delta_n;
/*计算归化时间t_k*/
t_observe = UTC2BDST(time.year,time.month,time.day,time.hour,time.minute,time.second,&secondOfweek1);
toc = UTC2BDST(time.year,time.month,time.day,time.hour,time.minute,time.second,&secondOfweek2);
Delta_t = a0 + a1*(t_observe-toc) + a2*(t_observe-toc)*(t_observe-toc);
t = t_observe - Delta_t;
//t = UTC2BDS(time.year,time.month,time.day,time.hour,time.minute ,time.second,&secondOfweek);
tk = t - toe - 14;
if(tk>302400)
tk -= 604800;
else
if(tk<-302400)
tk += 604800;
printf("归化时间tk = %.20lf\n",tk);
/*计算观测时刻卫星平近点角Mk*/
Mk = M0 + n*tk;
printf("平近点角Mk = %.20lf\n",Mk);
/*计算偏近点角Ek*/
Ek = Mk;
Ek = Mk + e*sin(Ek);
for(int i=0;i<2;i++)
{
Ek = Mk + e*sin(Ek);
}
//Ek=Mk;
//E1=Mk+e*sin(Ek);
//while ( abs(E1-Ek)>1e-10 )
//{
// Ek=E1;
// E1=Mk+e*sin(E1);
//}
//Ek=E1;
printf("偏近点角Ek = %.20lf\n",Ek);
/*计算真近点角Vk*/
//Vk = atan(sqrt(1-e*e)*sin(Ek)/(cos(Ek)-e));
//Vk=2*atan2(sqrt((1+e)/(1-e))*tan(Ek/2),1);
Vk = atan2(sqrt(1-e*e)*sin(Ek),(cos(Ek)-e));
printf("真近点角Vk = %.20lf\n",Vk);
/*计算升交距角fai_k*/
fai_k = Vk + w;
printf("升交距角fai_k = %.20lf\n",fai_k);
/*计算摄动改正量*/
_6u = Cuc*cos(2*fai_k) + Cus*sin(2*fai_k);
_6r = Crc*cos(2*fai_k) + Crs*sin(2*fai_k);
_6i = Cic*cos(2*fai_k) + Cis*sin(2*fai_k);
printf("升摄动改正量 _6u = %.20lf\n",_6u);
printf("升摄动改正量 _6r = %.20lf\n",_6r);
printf("升摄动改正量 _6i = %.20lf\n",_6i);
/*计算摄动改正后的 升交距角uk 卫星矢径rk 轨道倾角ik*/
uk = fai_k + _6u;
rk = pow(sqrt_a,2)*(1-e*cos(Ek)) + _6r;
ik = i0 + _6i + IDOT*tk;
printf("升交距角uk = %.20lf\n",uk);
printf("卫星矢径rk = %.20lf\n",rk);
printf("轨道倾角ik = %.20lf\n",ik);
/*计算卫星在轨道平面坐标系的坐标*/
Xk = rk*cos(uk);
Yk = rk*sin(uk);
printf("Xk = %.20lf\n",Xk);
printf("Yk = %.20lf\n",Yk);
if(strcmp(name,"C01")==0||strcmp(name,"C02")==0||strcmp(name,"C03")==0||strcmp(name,"C04")==0||strcmp(name,"C05")==0)
{
/*GEO*/
OMEGA_k = OMEGA_0 + OMEGA_DOT*tk - we*toe;
printf("升交点经度OMEGA_k = %.20lf\n",OMEGA_k);
X__obs_k = Xk*cos(OMEGA_k)-Yk*cos(ik)*sin(OMEGA_k);
Y__obs_k = Xk*sin(OMEGA_k)+Yk*cos(ik)*cos(OMEGA_k);
Z__obs_k = Yk*sin(ik);
X_obs_k = cos(we*tk)*X__obs_k + sin(we*tk)*cos(-5.0/180*pi)*Y__obs_k + sin(we*tk)*sin(-5.0/180*pi)*Z__obs_k;
Y_obs_k = -1*sin(we*tk)*X__obs_k + cos(we*tk)*cos(-5.0/180*pi)*Y__obs_k + cos(we*tk)*sin(-5.0/180*pi)*Z__obs_k;
Z_obs_k = -1*sin(-5.0/180*pi)*Y__obs_k + cos(-5.0/180*pi)*Z__obs_k;
}
else
{
/*MEO/IGSO*/
/*计算观测时刻升交点经度OMEGA_k*/
OMEGA_k = OMEGA_0 + (OMEGA_DOT-we)*tk - we*toe;
printf("升交点经度OMEGA_k = %.20lf\n",OMEGA_k);
/*计算卫星在CGCS2000中的坐标*/
X_obs_k = Xk*cos(OMEGA_k)-Yk*cos(ik)*sin(OMEGA_k);
Y_obs_k = Xk*sin(OMEGA_k)+Yk*cos(ik)*cos(OMEGA_k);
Z_obs_k = Yk*sin(ik);
}
printf("%s\n",name);
printf("X_obs_k=%.6lf Y_obs_k=%.6lf Z_obs_k=%.6lf a0=%.6lf\n\n",X_obs_k/1000.0,Y_obs_k/1000.0,Z_obs_k/1000.0,a0*1e+06);
fprintf(FileWrite,"%s %.6lf %.6lf %.6lf %.6lf\n",name,X_obs_k/1000.0,Y_obs_k/1000.0,Z_obs_k/1000.0,a0*1e+06);
}
fclose(file);
fclose(FileWrite);
}
int main()
{
FILE *file;
FILE *FileWrite;
FigureOut(file,FileWrite);
return 0;
}该解算有三个需要注意的地方。
第一,计算周内秒 t 有两个方法。一是程序中的UTC2BDS函数,用参考时刻的年月日减去BDST的起始历元2006年1月1日0时0分0秒,从而得出周内秒。二是使用儒略日计算,见程序中的UTC2BDST函数。因为解算方法是在GPS的基础上,BDST = GPST -14s,所以 tk = t - toe -14。
第二,计算偏近点角时使用正确的迭代方法,我在网上找了多种迭代方法,经过尝试发现代码中这种方法最好。
第三,计算真近点角时用的是arctan2。因为arctan的取值范围是-pi/2到pi/2,不满足真近点角0到2pi的取值范围。
关于卫星类型,在 星座状态 (csno-tarc.cn) 网站查询卫星信息,看是GEO,MEO还是IGSO。
二、18参数卫星轨道计算
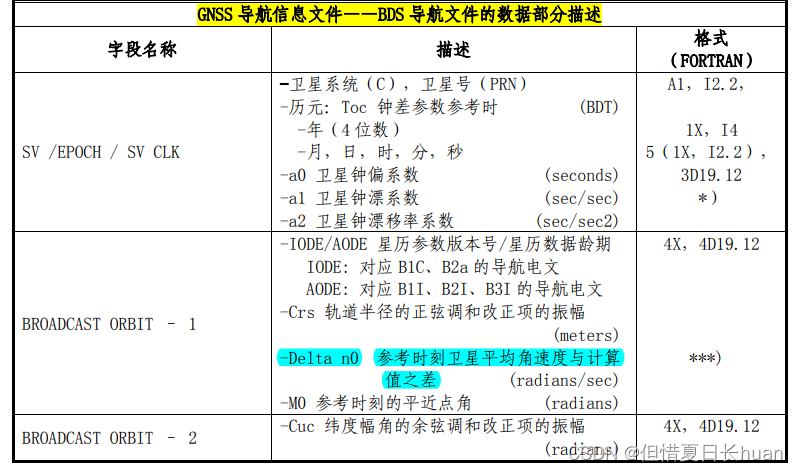
2.1国内IGMAS RINEX3.03标准
首先我们先来看计算公式
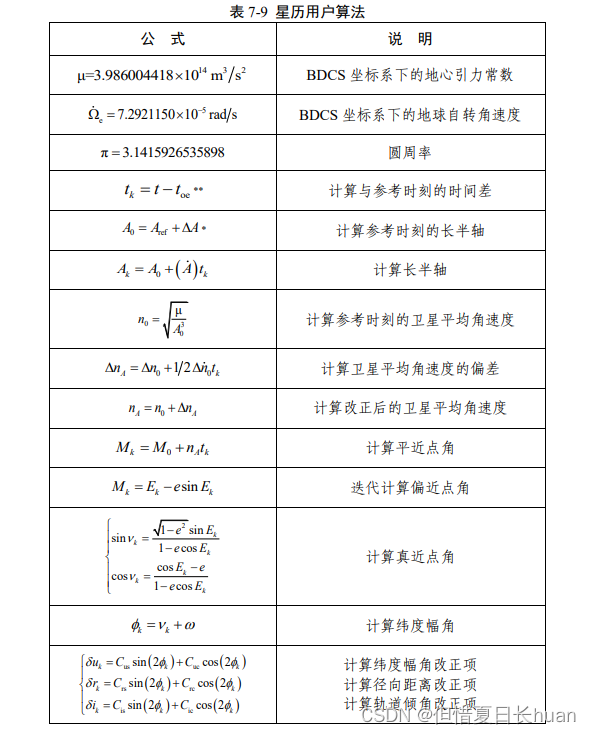
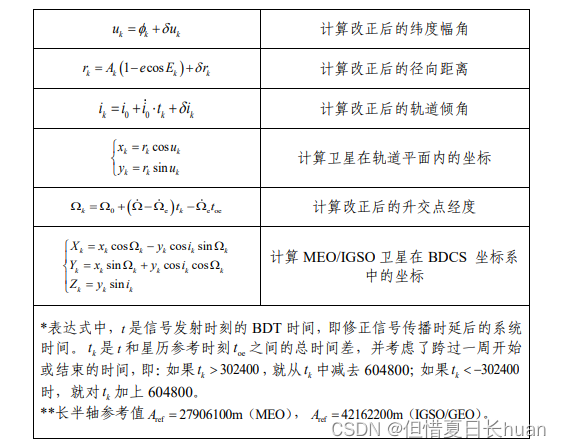
18参数RINEX3.03位置如图所示
C语言代码如下。
#include<stdio.h>
#include<stdlib.h>
#include<math.h>
#include<string.h>
#define MAX_DATA_SIZE 300000
const double GM = 3.986005e+14, we = 7.292115e-05,
pi = 3.1415926, miu = 3.986004418e+14,
Aref_MEO = 27906100, Aref_IGSOGEO = 42162200;
typedef struct
{
int year; //年
int month; //月
int day; //日
int hour; //时
int minute;//分
double second;//秒
}Time;
typedef struct
{
char name[10];
double a0, a1, a2;//钟差 钟速 钟漂
double IODE, Crs, Delta_n0, M0;//星历参数版本号 轨道半径的正弦调和改正项的振幅 参考时刻卫星平均角速度与计算值之差 Toe时刻的平近点角
double Cuc, e, Cus, Delta_A;//纬度幅角的余弦调和改正项的振幅 轨道偏心率 纬度幅角的正弦调和改正项的振幅 轨道长半径的平方根
double toe, Cic, OMEGA_0, Cis;//星历表参考历元 轨道倾角的余弦调和项 升交点赤经 轨道倾角的正弦调和项
double i0, Crc, w, OMEGA_DOT;//轨道倾角 轨道半径的余弦调和项 近地点角距 升交点赤经变化率
double IDOT, Data, weekno, A_DOT;//轨道倾角变化率 电文来源 BDS的整周计数 长半轴变化率
double svacc, HS_SatH1, TGD_TGD1, ISC_TGD2;//卫星精度 卫星自主健康标识 TGD1星上设备时延差 TGD2星上设备时延差
double BDS_Second, IODC_AODC, Delta_n0_DOT, SatType;//信息的发射时间( BDT 的周内秒)钟差参数版本号/时钟数据龄期
//参考时刻卫星平均角速度与值之差的变化率 留空 卫星轨道类型
double secondOfweek1, secondOfweek2, secondOfweek;
double n, n0, t_observe, t, tk , Delta_t, toc, Mk, Vk, phi_k, A0, Ak, Delta_nA, nA;
double _6u, _6r, _6i, uk, rk, ik, Xk, Yk, Ek, E1;
double OMEGA_k, X_obs_k, Y_obs_k, Z_obs_k, X__obs_k, Y__obs_k, Z__obs_k;
}Parameter;
double UTC2BDST(int year, int month, int day, int hour, int minute, double second, double *secondOfweek)
{
double JD, WN;
if (month <= 2)
{
year -= 1;
month += 12;
}
JD = 365.25 * year + int(30.6001 * (month + 1)) + day + 1720981.5 + hour / 24.0 + minute / 1440 + second / 86400 ; // 计算儒略日
WN = int((JD - 2453736.5) / 7) ; // WN:GPS_week number 目标时刻的GPS周
*secondOfweek = (int(JD - 2453736.5) - (7.0 * WN)) * 24 * 3600.0 ; // tGPS:目标时刻的GPS秒 减去14秒为BDT
return *secondOfweek;
}
double UTC2BDS(int year, int month, int day, int hour, int minute, double second, double *secondOfweek)
{
int DayofYear = 0;
int DayofMonth = 0;
for (int i = 2006; i < year; i++)
{
if ((i % 4 == 0 && i % 100 != 0) || i % 400 == 0)
DayofYear += 366;
else
DayofYear += 365;
}
for (int i = 1; i < month; i++)
{
if (i == 1 || i == 3 || i == 5 || i == 7 || i == 8 || i == 10 || i ==12)
DayofMonth += 31;
else if (i == 4 || i == 6 || i == 9 || i == 11)
DayofMonth += 30;
else
{
if ((year % 4 == 0 && year % 100 != 0) || year % 400 == 0)
DayofMonth += 29;
else
DayofMonth += 28;
}
}
int Day;
Day = DayofMonth + day + DayofYear-1;//2006年1月1日起始历元
*secondOfweek = Day % 7 * 86400 + hour * 3600 + minute * 60 + second;
return *secondOfweek;
}
void FigureOut(FILE *file,FILE *FileWrite)
{
int data_count = 0;
int EphemerisData[MAX_DATA_SIZE];
file = fopen("E:\\Buffer\\data18_IGMAS.txt","r");
FileWrite = fopen("E:\\Buffer\\result18_IGMAS.txt","w");
if(!file||!FileWrite)
{
printf("open the file error!\n");
}
Time time;//年月日时分秒
Parameter para;
while(1)
{
if(feof(file))
{
printf("文件读取结束");
break;
}
fscanf(file,"%s",¶.name);
//printf("%s\n",name);
fscanf(file, " %d %d %d %d %d %lf %lf %lf %lf",&time.year, &time.month, &time.day, &time.hour, &time.minute, &time.second, ¶.a0, ¶.a1, ¶.a2);
//printf(" %d %d %d %d %d %.20lf %.20lf %.20lf %.20lf \n", time.year, time.month,time.day, time.hour, time.minute, time.second, para.a0, para.a1, para.a2);
if( (strcmp(para.name,"C19")==0||strcmp(para.name,"C20")==0||
strcmp(para.name,"C21")==0||strcmp(para.name,"C22")==0||strcmp(para.name,"C23")==0||strcmp(para.name,"C24")==0||
strcmp(para.name,"C25")==0||strcmp(para.name,"C26")==0||strcmp(para.name,"C27")==0||strcmp(para.name,"C28")==0||
strcmp(para.name,"C29")==0||strcmp(para.name,"C30")==0||strcmp(para.name,"C32")==0||strcmp(para.name,"C33")==0||
strcmp(para.name,"C34")==0||strcmp(para.name,"C35")==0||strcmp(para.name,"C36")==0||strcmp(para.name,"C37")==0||
strcmp(para.name,"C38")==0||strcmp(para.name,"C39")==0||strcmp(para.name,"C40")==0||strcmp(para.name,"C41")==0||
strcmp(para.name,"C42")==0||strcmp(para.name,"C43")==0||strcmp(para.name,"C44")==0||strcmp(para.name,"C45")==0||
strcmp(para.name,"C46")==0)&&(time.year==2023) )
//if( (strcmp(para.name,"C06")==0||strcmp(para.name,"C07")==0||strcmp(para.name,"C08")==0||strcmp(para.name,"C09")==0||
//strcmp(para.name,"C10")==0||strcmp(para.name,"C13")==0||strcmp(para.name,"C16")==0||strcmp(para.name,"C31")==0||
//strcmp(para.name,"C38")==0||strcmp(para.name,"C39")==0||strcmp(para.name,"C40")==0||strcmp(para.name,"C56")==0)&&(time.year==2023) )
{
fscanf(file, " %lf %lf %lf %lf ", ¶.IODE,¶.Crs,¶.Delta_n0,¶.M0);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.IODE, para.Crs, para.Delta_n0, para.M0);
fscanf(file, " %lf %lf %lf %lf ", ¶.Cuc, ¶.e, ¶.Cus, ¶.Delta_A);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.Cuc, para.e, para.Cus, para.Delta_A);
fscanf(file, " %lf %lf %lf %lf ", ¶.toe, ¶.Cic, ¶.OMEGA_0, ¶.Cis);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.toe, para.Cic, para.OMEGA_0, para.Cis);
fscanf(file, " %lf %lf %lf %lf ", ¶.i0, ¶.Crc, ¶.w, ¶.OMEGA_DOT);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.i0, para.Crc, para.w, para.OMEGA_DOT);
fscanf(file, " %lf %lf %lf %lf ", ¶.IDOT, ¶.Data, ¶.weekno, ¶.A_DOT);
//printf(" %.20lf \t %.20lf \t %.20lf \t %.20lf \n", para.IDOT, para.Data, para.weekno, para.A_DOT);
fscanf(file, " %lf %lf %lf %lf ", ¶.svacc, ¶.HS_SatH1, ¶.TGD_TGD1, ¶.ISC_TGD2);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.svacc, para.HS_SatH1, para.IGD_TGD1, para.ISC_TGD2);
fscanf(file, " %lf %lf %lf %lf ", ¶.BDS_Second, ¶.IODC_AODC, ¶.Delta_n0_DOT, ¶.SatType);
//printf(" %.10lf \t %.10lf \n", para.BDS_Second, para.IODC_AODC, para.Delta_n0_DOT, para.SatType);
/*计算归化时间t_k*/
//t_observe = UTC2BDST(time.year,time.month,time.day,time.hour,time.minute,time.second,¶.secondOfweek1);
//toc = UTC2BDST(time.year,time.month,time.day,time.hour,time.minute,time.second,¶.secondOfweek2);
//para.Delta_t = para.a0 + para.a1*(para.t_observe-para.toc) + para.a2*(para.t_observe-para.toc)*(para.t_observe-para.toc);
//t = t_observe - Delta_t;
para.t = UTC2BDS(time.year,time.month,time.day,time.hour,time.minute ,time.second,¶.secondOfweek);
para.tk = para.t - para.toe - 14;
if(para.tk>302400)
{
para.tk -= 604800;
}
else
if(para.tk<-302400)
{
para.tk += 604800;
}
printf("归化时间tk = %.20lf\n",para.tk);
/*计算参考时刻的长半轴*/
if(strcmp(para.name,"C11")==0||strcmp(para.name,"C12")==0||strcmp(para.name,"C14")==0||strcmp(para.name,"C19")==0||strcmp(para.name,"C20")==0||strcmp(para.name,"C21")==0
||strcmp(para.name,"C22")==0||strcmp(para.name,"C23")==0||strcmp(para.name,"C24")==0||strcmp(para.name,"C25")==0||strcmp(para.name,"C26")==0||strcmp(para.name,"C27")==0
||strcmp(para.name,"C28")==0||strcmp(para.name,"C29")==0||strcmp(para.name,"C30")==0||strcmp(para.name,"C32")==0||strcmp(para.name,"C33")==0||strcmp(para.name,"C34")==0
||strcmp(para.name,"C35")==0||strcmp(para.name,"C36")==0||strcmp(para.name,"C37")==0||strcmp(para.name,"C41")==0||strcmp(para.name,"C42")==0||strcmp(para.name,"C43")==0
||strcmp(para.name,"C44")==0||strcmp(para.name,"C45")==0||strcmp(para.name,"C46")==0||strcmp(para.name,"C57")==0||strcmp(para.name,"C58")==0)
{para.A0 = Aref_MEO + para.Delta_A;}
else
{para.A0 = Aref_IGSOGEO + para.Delta_A;}
printf("参考时刻的长半轴A0 = %.20lf\n",para.A0);
/*计算长半轴Ak*/
para.Ak = para.A0 + para.A_DOT*para.tk;
printf("长半轴Ak = %.20lf\n",para.Ak);
/*计算参考时刻的卫星平均角速度n0*/
para.n0 = sqrt(miu/pow(para.A0,3));
printf("参考时刻的卫星平均角速度n0 = %.20lf\n",para.n0);
/*计算卫星平均角速度的偏差Delta_nA*/
para.Delta_nA = para.Delta_n0 + (1.0/2)*para.Delta_n0_DOT*para.tk;
printf("卫星平均角速度的偏差Delta_nA = %.20lf\n",para.Delta_nA);
/*计算改正后的卫星平均角速度nA*/
para.nA = para.n0 + para.Delta_nA;
printf("改正后的卫星平均角速度nA = %.20lf\n",para.nA);
/*计算平近点角Mk*/
para.Mk = para.M0 + para.nA*para.tk;
printf("平近点角Mk = %.20lf\n",para.Mk);
/*计算偏近点角Ek*/
para.Ek = para.Mk;
para.Ek = para.Mk + para.e*sin(para.Ek);
for(int i=0;i<2;i++)
{
para.Ek = para.Mk + para.e*sin(para.Ek);
}
//int count = 0;
//para.Ek=para.Mk;
//para.E1=para.Mk+para.e*sin(para.Ek);
//while ( abs(para.E1-para.Ek)>1e-10 )
//{
// para.Ek=para.E1;
// para.E1=para.Mk+para.e*sin(para.E1);
// count++;
// if(count>1e+06)
// {
// break;
// }
//}
//para.Ek=para.E1;
printf("偏近点角Ek = %.20lf\n",para.Ek);
/*计算真近点角Vk*/
//para.Vk = atan(sqrt(1-para.e*para.e)*sin(para.Ek)/(cos(para.Ek)-para.e));
//para.Vk=2*atan2(sqrt((1+para.e)/(1-para.e))*tan(para.Ek/2),1);
para.Vk = atan2(sqrt(1-para.e*para.e)*sin(para.Ek),(cos(para.Ek)-para.e));
printf("真近点角Vk = %.20lf\n",para.Vk);
/*计算纬度幅角fai_k*/
para.phi_k = para.Vk + para.w;
printf("升交距角fai_k = %.20lf\n",para.phi_k);
/*计算摄动改正量*/
para._6u = para.Cus*sin(2*para.phi_k) + para.Cuc*cos(2*para.phi_k);
para._6r = para.Crs*sin(2*para.phi_k) + para.Crc*cos(2*para.phi_k);
para._6i = para.Cis*sin(2*para.phi_k) + para.Cic*cos(2*para.phi_k);
printf("纬度幅角改正量 _6u = %.20lf\n",para._6u);
printf("径向距离改正量 _6r = %.20lf\n",para._6r);
printf("轨道倾角改正量 _6i = %.20lf\n",para._6i);
/*计算摄动改正后的 纬度幅角uk 径向距离rk 轨道倾角ik*/
para.uk = para.phi_k + para._6u;
para.rk = para.Ak*(1-para.e*cos(para.Ek)) + para._6r;
para.ik = para.i0 + para.IDOT*para.tk + para._6i;
printf("升交距角uk = %.20lf\n",para.uk);
printf("卫星矢径rk = %.20lf\n",para.rk);
printf("轨道倾角ik = %.20lf\n",para.ik);
/*计算卫星在轨道平面坐标系的坐标*/
para.Xk = para.rk*cos(para.uk);
para.Yk = para.rk*sin(para.uk);
printf("Xk = %.20lf\n",para.Xk);
printf("Yk = %.20lf\n",para.Yk);
if(strcmp(para.name,"C01")==0||strcmp(para.name,"C02")==0||strcmp(para.name,"C03")==0||strcmp(para.name,"C04")==0||strcmp(para.name,"C05")==0)
{
/*GEO*/
para.OMEGA_k = para.OMEGA_0 + para.OMEGA_DOT*para.tk - we*para.toe;
para.X__obs_k = para.Xk*cos(para.OMEGA_k)-para.Yk*cos(para.ik)*sin(para.OMEGA_k);
para.Y__obs_k = para.Xk*sin(para.OMEGA_k)+para.Yk*cos(para.ik)*cos(para.OMEGA_k);
para.Z__obs_k = para.Yk*sin(para.ik);
para.X_obs_k = cos(we*para.tk)*para.X__obs_k + sin(we*para.tk)*cos(-5.0/180*pi)*para.Y__obs_k + sin(we*para.tk)*sin(-5.0/180*pi)*para.Z__obs_k;
para.Y_obs_k = -1*sin(we*para.tk)*para.X__obs_k + cos(we*para.tk)*cos(-5.0/180*pi)*para.Y__obs_k + cos(we*para.tk)*sin(-5.0/180*pi)*para.Z__obs_k;
para.Z_obs_k = -1*sin(-5.0/180*pi)*para.Y__obs_k + cos(-5.0/180*pi)*para.Z__obs_k;
}
else
{
/*MEO/IGSO*/
/*计算改正后的升交点经度OMEGA_k*/
para.OMEGA_k = para.OMEGA_0 + (para.OMEGA_DOT-we)*para.tk - we*para.toe;
printf("升交点经度OMEGA_k = %.20lf\n",para.OMEGA_k);
/*计算卫星在CGCS2000中的坐标*/
para.X_obs_k = para.Xk*cos(para.OMEGA_k)-para.Yk*cos(para.ik)*sin(para.OMEGA_k);
para.Y_obs_k = para.Xk*sin(para.OMEGA_k)+para.Yk*cos(para.ik)*cos(para.OMEGA_k);
para.Z_obs_k = para.Yk*sin(para.ik);
}
printf("%s\n",para.name);
printf("X_obs_k=%.6lf Y_obs_k=%.6lf Z_obs_k=%.6lf a0=%.6lf\n\n",para.X_obs_k/1000.0,para.Y_obs_k/1000.0,para.Z_obs_k/1000.0,para.a0*1e+06);
//fprintf(FileWrite,"%d %d %d %d %d %.2lf",time.year,time.month,time.day,time.hour,time.minute,time.second);
fprintf(FileWrite,"%s %.6lf %.6lf %.6lf %.6lf\n",para.name,para.X_obs_k/1000.0,para.Y_obs_k/1000.0,para.Z_obs_k/1000.0,para.a0*1e+06);
}
}
fclose(file);
fclose(FileWrite);
}
int main()
{
FILE *file;
FILE *FileWrite;
FigureOut(file,FileWrite);
return 0;
}
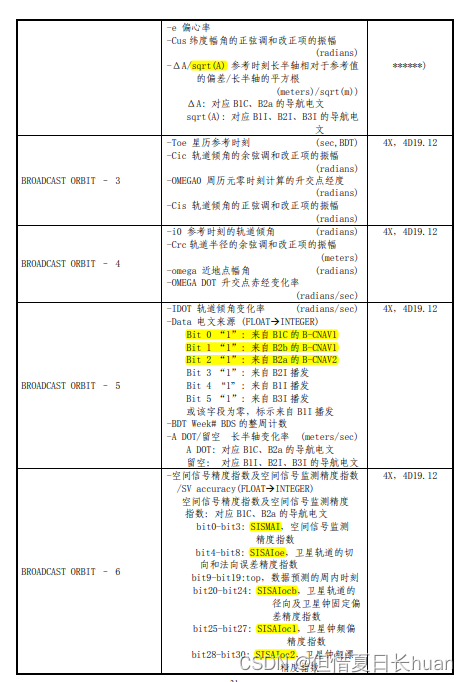
2.2国外RINEX4.00标准
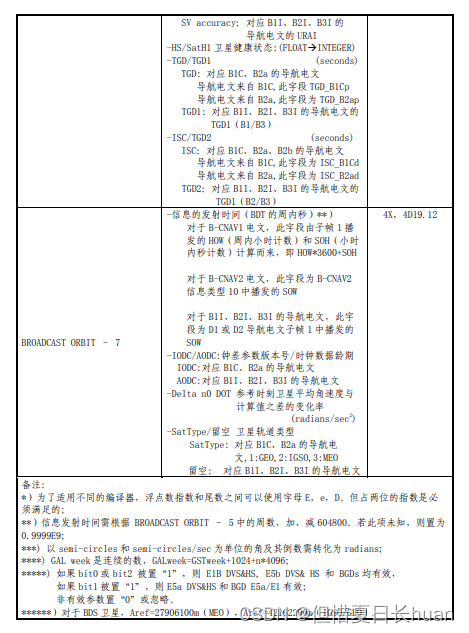
国外标准分为CNAV1与CNAV2。笔者写了CNAV1的代码供参考。
国外标准的公式与国内IGMAS标准有一个区别,要将A0 = Aref + DeltaA换为A0 = sqrtA的平方。
CNAV1参数位置如下,按下图提取我们所需参数。
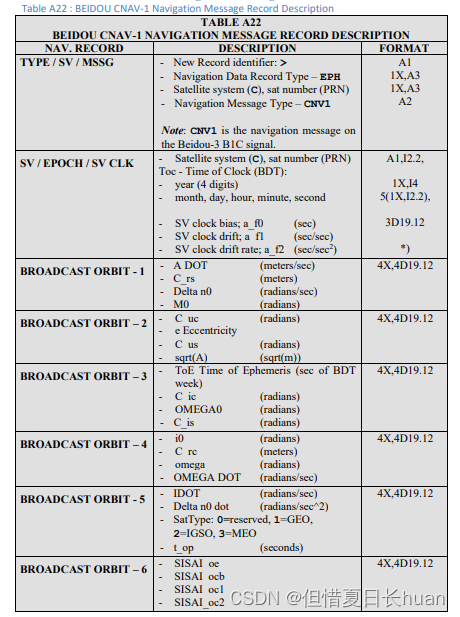
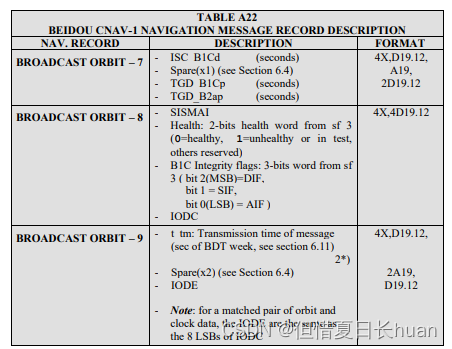
C语言代码如下。
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <string.h>
#define MAX_DATA_SIZE 300000
const double GM = 3.986005e+14, we = 7.292115e-05,
pi = 3.1415926, miu = 3.986004418e+14,
Aref_MEO = 27906100, Aref_IGSOGEO = 42162200;
typedef struct
{
int year; //年
int month; //月
int day; //日
int hour; //时
int minute;//分
double second;//秒
}Time;
typedef struct
{
char name[10],name1[20];
double a0, a1, a2;//钟差 钟速 钟漂
double A_DOT, Crs, Delta_n0, M0;//星历参数版本号 轨道半径的正弦调和改正项的振幅 参考时刻卫星平均角速度与计算值之差 Toe时刻的平近点角
double Cuc, e, Cus, Delta_A;//纬度幅角的余弦调和改正项的振幅 轨道偏心率 纬度幅角的正弦调和改正项的振幅 轨道长半径的平方根
double toe, Cic, OMEGA_0, Cis;//星历表参考历元 轨道倾角的余弦调和项 升交点赤经 轨道倾角的正弦调和项
double i0, Crc, w, OMEGA_DOT;//轨道倾角 轨道半径的余弦调和项 近地点角距 升交点赤经变化率
double IDOT, n0_DOT, SatType, t_op;//轨道倾角变化率 电文来源 BDS的整周计数 长半轴变化率
double SlSAl_oe, SISAI_ocb, SISAI_oc1, SISAI_oc2;//卫星精度 卫星自主健康标识 TGD1星上设备时延差 TGD2星上设备时延差
double ISC_B1Cd, Spare_x1, TGD_B1Cp, TGD_B2ap;//信息的发射时间( BDT 的周内秒)钟差参数版本号/时钟数据龄期
//参考时刻卫星平均角速度与值之差的变化率 留空 卫星轨道类型
double SISMAI , Health, B1C, IODC;
double t_tm, Spare_x2, IODE, Note;
double secondOfweek1, secondOfweek2, secondOfweek;
double n, n0, t_observe, t, tk , Delta_t, toc, Mk, Vk, phi_k, A0, Ak, sqrt_A, nA;
double _6u, _6r, _6i, uk, rk, ik, Xk, Yk, Ek, E1, Delta_nA;
double OMEGA_k, X_obs_k, Y_obs_k, Z_obs_k, X__obs_k, Y__obs_k, Z__obs_k;
}Parameter;
double UTC2BDST(int year, int month, int day, int hour, int minute, double second, double *secondOfweek) {
double JD, WN;
if (month <= 2) {
year -= 1;
month += 12;
}
JD = 365.25 * year + int(30.6001 * (month + 1)) + day + 1720981.5 + hour / 24.0 + minute / 1440 +
second / 86400; // 计算儒略日
WN = int((JD - 2453736.5) / 7); // WN:GPS_week number 目标时刻的GPS周
*secondOfweek = (int(JD - 2453736.5) - (7.0 * WN)) * 24 * 3600.0; // tGPS:目标时刻的GPS秒 减去14秒为BDT
return *secondOfweek;
}
double UTC2BDS(int year, int month, int day, int hour, int minute, double second, double *secondOfweek)
{
int DayofYear = 0;
int DayofMonth = 0;
for (int i = 2006; i < year; i++)
{
if ((i % 4 == 0 && i % 100 != 0) || i % 400 == 0)
DayofYear += 366;
else
DayofYear += 365;
}
for (int i = 1; i < month; i++)
{
if (i == 1 || i == 3 || i == 5 || i == 7 || i == 8 || i == 10 || i ==12)
DayofMonth += 31;
else if (i == 4 || i == 6 || i == 9 || i == 11)
DayofMonth += 30;
else
{
if ((year % 4 == 0 && year % 100 != 0) || year % 400 == 0)
DayofMonth += 29;
else
DayofMonth += 28;
}
}
int Day;
Day = DayofMonth + day + DayofYear-1;//2006年1月1日起始历元
*secondOfweek = Day % 7 * 86400 + hour * 3600 + minute * 60 + second;
return *secondOfweek;
}
void FigureOut(FILE *file,FILE *FileWrite)
{
int data_count = 0;
char ReadPath[50] = "E:\\Buffer\\data18_RINEX4.00.txt";
char WritePath[50] = "E:\\Buffer\\result18_RINEX4.00.txt";
file = fopen(ReadPath,"r");
FileWrite = fopen(WritePath,"w");
if(!file||!FileWrite)
{
printf("open the file error!\n");
}
Time time;//年月日时分秒
Parameter para;
while(1)
{
if(feof(file))
{
printf("文件读取结束");
break;
}
fgets(para.name1,15,file);
//printf("%s\n",para.name);
if( strcmp(para.name1,"> EPH C10 CNV1") == 0 || strcmp(para.name1,"> EPH C16 CNV1") == 0 || strcmp(para.name1,"> EPH C26 CNV1") == 0 || strcmp(para.name1,"> EPH C29 CNV1") == 0 ||
strcmp(para.name1,"> EPH C30 CNV1") == 0 || strcmp(para.name1,"> EPH C35 CNV1") == 0 || strcmp(para.name1,"> EPH C36 CNV1") == 0 || strcmp(para.name1,"> EPH C38 CNV1") == 0 ||
strcmp(para.name1,"> EPH C39 CNV1") == 0 || strcmp(para.name1,"> EPH C40 D1") == 0 )
{
fscanf(file, "%s %d %d %d %d %d %lf %lf %lf %lf",¶.name,&time.year,&time.month,
&time.day,&time.hour,&time.minute,&time.second,¶.a0, ¶.a1, ¶.a2);
//printf(" %d %d %d %d %d %.20lf %.20lf %.20lf %.20lf \n", time.year, time.month,
//time.day, time.hour, time.minute, time.second, para.a0, para.a1, para.a2);
if(time.year == 2023 && time.month == 6 && time.day == 1 && time.hour == 0 && time.minute == 0 && time.second == 0.0)
{
fscanf(file, " %lf %lf %lf %lf ", ¶.A_DOT,¶.Crs,¶.Delta_n0,¶.M0);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.A_DOT, para.Crs, para.Delta_n0, para.M0);
fscanf(file, " %lf %lf %lf %lf ", ¶.Cuc, ¶.e, ¶.Cus, ¶.sqrt_A);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.Cuc, para.e, para.Cus, para.sqrt_A);
fscanf(file, " %lf %lf %lf %lf ", ¶.toe, ¶.Cic, ¶.OMEGA_0, ¶.Cis);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.toe, para.Cic, para.OMEGA_0, para.Cis);
fscanf(file, " %lf %lf %lf %lf ", ¶.i0, ¶.Crc, ¶.w, ¶.OMEGA_DOT);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.i0, para.Crc, para.w, para.OMEGA_DOT);
fscanf(file, " %lf %lf %lf %lf ", ¶.IDOT, ¶.n0_DOT, ¶.SatType, ¶.t_op);
//printf(" %.20lf \t %.20lf \t %.20lf \t %.20lf \n", para.IDOT, para.n0_DOT, para.SatType, para.t_op);
fscanf(file, " %lf %lf %lf %lf ", ¶.SlSAl_oe, ¶.SISAI_ocb, ¶.SISAI_oc1, ¶.SISAI_oc2);
//printf(" %.10lf \t %.10lf \t %.10lf \t %.10lf \n", para.SlSAl_oe, para.SISAI_ocb, para.SISAI_oc1, para.SISAI_oc2);
fscanf(file, " %lf %lf %lf %lf ", ¶.ISC_B1Cd, ¶.TGD_B1Cp, ¶.TGD_B2ap);
//printf(" %.10lf \t %.10lf \n", para.ISC_B1Cd, para.TGD_B1Cp, para.TGD_B2ap);
fscanf(file, " %lf %lf %lf %lf ", ¶.SISMAI , ¶.Health, ¶.B1C, ¶.IODC);
//printf(" %.10lf \t %.10lf \n", para.SISMAI, para.Health, para.B1C, para.TGD_B2ap);
fscanf(file, " %lf %lf %lf %lf ", ¶.t_tm, ¶.Note);
//printf(" %.10lf \t %.10lf \n", para.t_tm, para.Note);
/*计算归化时间t_k*/
//t_observe = UTC2BDST(time.year,time.month,time.day,time.hour,time.minute,time.second,&secondOfweek1);
//toc = UTC2BDST(time.year,time.month,time.day,time.hour,time.minute,time.second,&secondOfweek2);
//Delta_t = a0 + a1*(t_observe-toc) + a2*(t_observe-toc)*(t_observe-toc);
//t = t_observe - Delta_t;
para.t = UTC2BDS(time.year,time.month,time.day,time.hour,time.minute ,time.second,¶.secondOfweek);
para.tk = para.t - para.toe - 14;
if(para.tk>302400)
para.tk -= 604800;
else
if(para.tk<-302400)
para.tk += 604800;
printf("归化时间tk = %.20lf\n",para.tk);
/*计算参考时刻的长半轴*/
if(strcmp(para.name,"C11")==0||strcmp(para.name,"C12")==0||strcmp(para.name,"C14")==0||strcmp(para.name,"C19")==0||strcmp(para.name,"C20")==0||strcmp(para.name,"C21")==0
||strcmp(para.name,"C22")==0||strcmp(para.name,"C23")==0||strcmp(para.name,"C24")==0||strcmp(para.name,"C25")==0||strcmp(para.name,"C26")==0||strcmp(para.name,"C27")==0
||strcmp(para.name,"C28")==0||strcmp(para.name,"C29")==0||strcmp(para.name,"C30")==0||strcmp(para.name,"C32")==0||strcmp(para.name,"C33")==0||strcmp(para.name,"C34")==0
||strcmp(para.name,"C35")==0||strcmp(para.name,"C36")==0||strcmp(para.name,"C37")==0||strcmp(para.name,"C41")==0||strcmp(para.name,"C42")==0||strcmp(para.name,"C43")==0
||strcmp(para.name,"C44")==0||strcmp(para.name,"C45")==0||strcmp(para.name,"C46")==0||strcmp(para.name,"C57")==0||strcmp(para.name,"C58")==0)
{para.A0 = Aref_MEO + para.Delta_A;}
else
{para.A0 = Aref_IGSOGEO + para.Delta_A;}
printf("参考时刻的长半轴A0 = %.20lf\n",para.A0);
/*计算长半轴Ak*/
para.Ak = para.A0 + para.A_DOT*para.tk;
printf("长半轴Ak = %.20lf\n",para.Ak);
/*计算参考时刻的卫星平均角速度n0*/
para.n0 = sqrt(miu/pow(para.A0,3));
printf("参考时刻的卫星平均角速度n0 = %.20lf\n",para.n0);
/*计算卫星平均角速度的偏差Delta_nA*/
para.Delta_nA = para.Delta_n0 + (1.0/2)*para.n0_DOT*para.tk;
printf("卫星平均角速度的偏差Delta_nA = %.20lf\n",para.Delta_nA);
/*计算改正后的卫星平均角速度nA*/
para.nA = para.n0 + para.Delta_nA;
printf("改正后的卫星平均角速度nA = %.20lf\n",para.nA);
/*计算平近点角Mk*/
para.Mk = para.M0 + para.nA*para.tk;
printf("平近点角Mk = %.20lf\n",para.Mk);
/*计算偏近点角Ek*/
para.Ek = para.Mk;
para.Ek = para.Mk + para.e*sin(para.Ek);
for(int i=0;i<2;i++)
{
para.Ek = para.Mk + para.e*sin(para.Ek);
}
//int count = 0;
//Ek=Mk;
//E1=Mk+e*sin(Ek);
//while ( abs(E1-Ek)>1e-10 )
//{
// Ek=E1;
// E1=Mk+e*sin(E1);
// count++;
// if(count>1e+06)
// {
// break;
// }
//}
//Ek=E1;
printf("偏近点角Ek = %.20lf\n",para.Ek);
/*计算真近点角Vk*/
//Vk = atan(sqrt(1-e*e)*sin(Ek)/(cos(Ek)-e));
//Vk=2*atan2(sqrt((1+e)/(1-e))*tan(Ek/2),1);
para.Vk = atan2(sqrt(1-para.e*para.e)*sin(para.Ek),(cos(para.Ek)-para.e));
printf("真近点角Vk = %.20lf\n",para.Vk);
/*计算纬度幅角fai_k*/
para.phi_k = para.Vk + para.w;
printf("升交距角fai_k = %.20lf\n",para.phi_k);
/*计算摄动改正量*/
para._6u = para.Cus*sin(2*para.phi_k) + para.Cuc*cos(2*para.phi_k);
para._6r = para.Crs*sin(2*para.phi_k) + para.Crc*cos(2*para.phi_k);
para._6i = para.Cis*sin(2*para.phi_k) + para.Cic*cos(2*para.phi_k);
printf("纬度幅角改正量 _6u = %.20lf\n",para._6u);
printf("径向距离改正量 _6r = %.20lf\n",para._6r);
printf("轨道倾角改正量 _6i = %.20lf\n",para._6i);
/*计算摄动改正后的 纬度幅角uk 径向距离rk 轨道倾角ik*/
para.uk = para.phi_k + para._6u;
para.rk = para.Ak*(1-para.e*cos(para.Ek)) + para._6r;
para.ik = para.i0 + para.IDOT*para.tk + para._6i;
printf("升交距角uk = %.20lf\n",para.uk);
printf("卫星矢径rk = %.20lf\n",para.rk);
printf("轨道倾角ik = %.20lf\n",para.ik);
/*计算卫星在轨道平面坐标系的坐标*/
para.Xk = para.rk*cos(para.uk);
para.Yk = para.rk*sin(para.uk);
printf("Xk = %.20lf\n",para.Xk);
printf("Yk = %.20lf\n",para.Yk);
if(strcmp(para.name,"C01")==0||strcmp(para.name,"C02")==0||strcmp(para.name,"C03")==0||strcmp(para.name,"C04")==0||strcmp(para.name,"C05")==0)
{
/*GEO*/
para.OMEGA_k = para.OMEGA_0 + para.OMEGA_DOT*para.tk - we*para.toe;
para.X__obs_k = para.Xk*cos(para.OMEGA_k)-para.Yk*cos(para.ik)*sin(para.OMEGA_k);
para.Y__obs_k = para.Xk*sin(para.OMEGA_k)+para.Yk*cos(para.ik)*cos(para.OMEGA_k);
para.Z__obs_k = para.Yk*sin(para.ik);
para.X_obs_k = cos(we*para.tk)*para.X__obs_k + sin(we*para.tk)*cos(-5.0/180*pi)*para.Y__obs_k + sin(we*para.tk)*sin(-5.0/180*pi)*para.Z__obs_k;
para.Y_obs_k = -1*sin(we*para.tk)*para.X__obs_k + cos(we*para.tk)*cos(-5.0/180*pi)*para.Y__obs_k + cos(we*para.tk)*sin(-5.0/180*pi)*para.Z__obs_k;
para.Z_obs_k = -1*sin(-5.0/180*pi)*para.Y__obs_k + cos(-5.0/180*pi)*para.Z__obs_k;
}
else
{
/*MEO/IGSO*/
/*计算改正后的升交点经度OMEGA_k*/
para.OMEGA_k = para.OMEGA_0 + (para.OMEGA_DOT-we)*para.tk - we*para.toe;
printf("升交点经度OMEGA_k = %.20lf\n",para.OMEGA_k);
/*计算卫星在CGCS2000中的坐标*/
para.X_obs_k = para.Xk*cos(para.OMEGA_k)-para.Yk*cos(para.ik)*sin(para.OMEGA_k);
para.Y_obs_k = para.Xk*sin(para.OMEGA_k)+para.Yk*cos(para.ik)*cos(para.OMEGA_k);
para.Z_obs_k = para.Yk*sin(para.ik);
}
printf("%s\n",para.name);
printf("X_obs_k=%.6lf Y_obs_k=%.6lf Z_obs_k=%.6lf a0=%.6lf\n\n",para.X_obs_k/1000.0,para.Y_obs_k/1000.0,para.Z_obs_k/1000.0,para.a0*1e+06);
//fprintf(FileWrite,"%.6lf %.6lf %.6lf %.6lf\n",para.X_obs_k/1000.0,para.Y_obs_k/1000.0,para.Z_obs_k/1000.0,para.a0);
fprintf(FileWrite,"%.12lf %.12lf %.12lf %.12lf %.12lf %.12lf %.12lf %.12lf %.12lf\n",para.X_obs_k/1000.0,para.Y_obs_k/1000.0,para.Z_obs_k/1000.0,para.a0,para.a1,para.a2,para.sqrt_A,para.Ek,para.e);
}
}
}
fclose(file);
fclose(FileWrite);
}
int main()
{
FILE *file;
FILE *FileWrite;
FigureOut(file,FileWrite);
return 0;
}
如有错误,欢迎批评指正。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









