







 本文介绍了如何通过PC机和TDX-PITE实验装置,利用8255的B口控制四相八拍步进电机。详细讲解了实验目的、所需设备、控制原理、驱动电路图以及具体的编程步骤,包括设置8255的工作模式和编写控制电机转动的代码。
本文介绍了如何通过PC机和TDX-PITE实验装置,利用8255的B口控制四相八拍步进电机。详细讲解了实验目的、所需设备、控制原理、驱动电路图以及具体的编程步骤,包括设置8255的工作模式和编写控制电机转动的代码。
目录
6.1实验目的
掌握步进电机的控制方法
6.2实备
PC 机一台,TDX-PITE 实验装置一套
6.3实内容
编写实验程序,利用 8255 的 B 口来控制步进电机的运转。
6.4实验原理
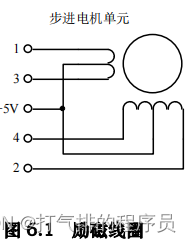
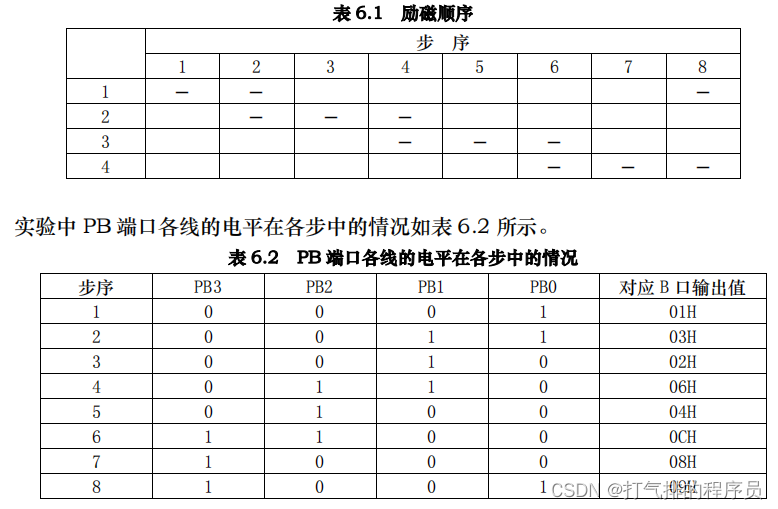
使用开环控制方式能对步进电机的转动方向、速度和角度进行调节。所谓步进,就是指每给步进电机一个递进脉冲,步进电机各绕组的通电顺序就改变一次,即电机转动一次。根据步进电机控制绕组的多少可以将电机分为三相、四相和五相。本实验系统所采用的步进电机为四相八拍电机。励磁线圈如图 6.1 所示,励磁顺序如表 6.1 所列。
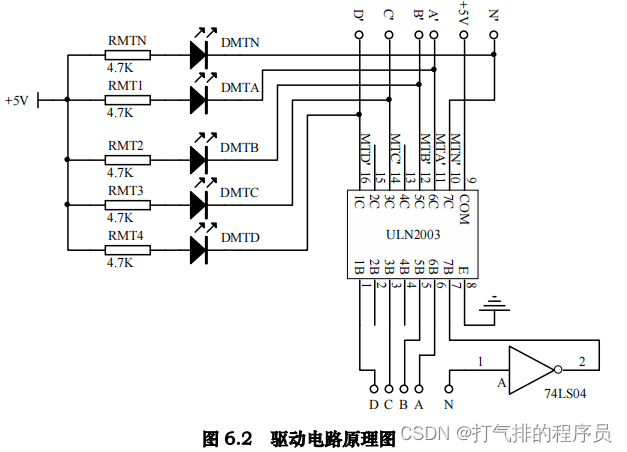
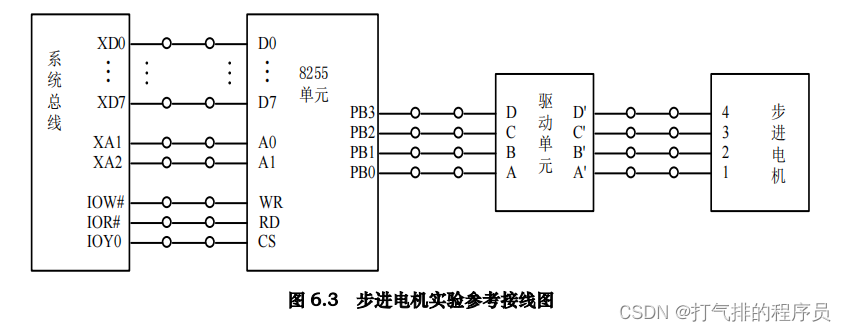
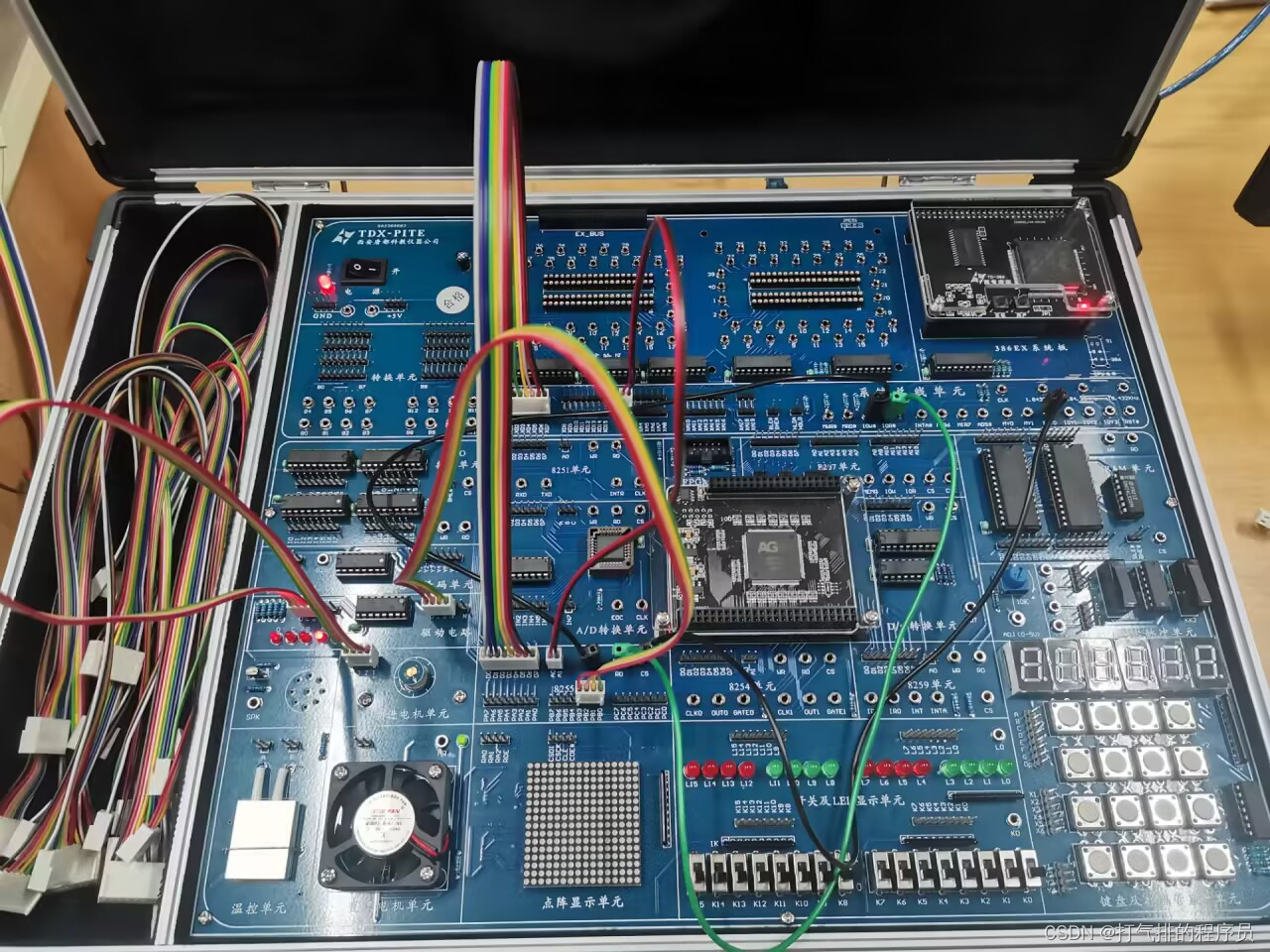
驱动电路原理图如图 6.2 所示。实验接线图如图 6.3 所示
 实物接线图
实物接线图
6.5实验步骤
1.按图 6.3 连接线路。
2.编写实验程序代码 (例程文件名为: CBUJIN.C) ,编译、链接后装入系统。
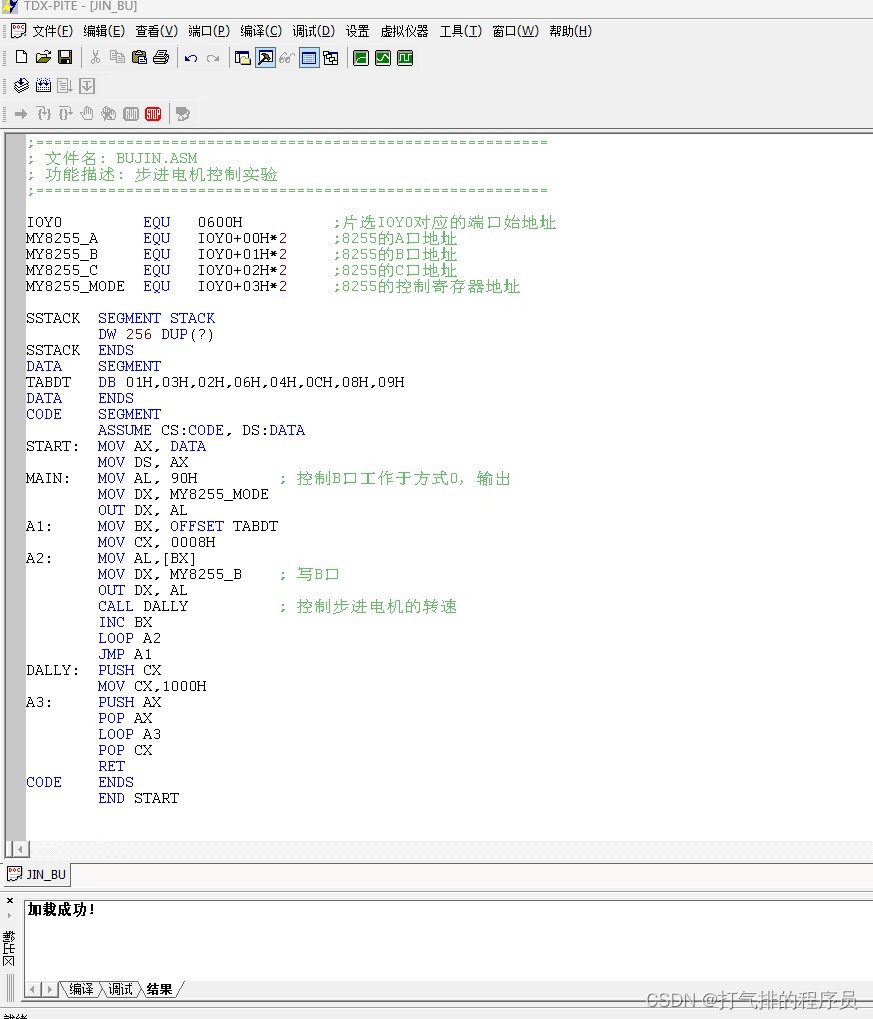
;=========================================================
; 文件名: BUJIN.ASM
; 功能描述: 步进电机控制实验
;=========================================================
IOY0 EQU 0600H ;片选IOY0对应的端口始地址
MY8255_A EQU IOY0+00H*2 ;8255的A口地址
MY8255_B EQU IOY0+01H*2 ;8255的B口地址
MY8255_C EQU IOY0+02H*2 ;8255的C口地址
MY8255_MODE EQU IOY0+03H*2 ;8255的控制寄存器地址
SSTACK SEGMENT STACK
DW 256 DUP(?)
SSTACK ENDS
DATA SEGMENT
TABDT DB 01H,03H,02H,06H,04H,0CH,08H,09H
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE, DS:DATA
START: MOV AX, DATA
MOV DS, AX
MAIN: MOV AL, 90H ; 控制B口工作于方式0,输出
MOV DX, MY8255_MODE
OUT DX, AL
A1: MOV BX, OFFSET TABDT
MOV CX, 0008H
A2: MOV AL,[BX]
MOV DX, MY8255_B ; 写B口
OUT DX, AL
CALL DALLY ; 控制步进电机的转速
INC BX
LOOP A2
JMP A1
DALLY: PUSH CX
MOV CX,1000H
A3: PUSH AX
POP AX
LOOP A3
POP CX
RET
CODE ENDS
END START
3.运行程序,观察实验现象。
注意: 步进电机不使用时请断开连接器,以免误操作使电机过热损坏



















 1242
1242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











