






 本文介绍了杜宾斯路径算法,一种经典的无人机路径规划方法,通过考虑最小转弯半径和运动模型生成满足动力学约束的最短路径。并提供了Matlab代码示例,展示了如何在实际操作中应用该算法进行路径规划和绘制。
本文介绍了杜宾斯路径算法,一种经典的无人机路径规划方法,通过考虑最小转弯半径和运动模型生成满足动力学约束的最短路径。并提供了Matlab代码示例,展示了如何在实际操作中应用该算法进行路径规划和绘制。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
杜宾斯路径 (Dubins Path) 是一种经典的无人机路径规划方法,旨在寻找无人机从一个起点到终点的最短路径,使得无人机在给定约束条件下沿着路径飞行。这种路径规划方法最初由美国数学家杜宾斯 (Dubins) 在20世纪50年代提出,成为航空、无人机和自动驾驶等领域中常用的路径规划算法之一。杜宾斯路径的特点在于,它考虑了无人机的最小转弯半径,并通过一系列简单的运动模型来生成路径。这些运动模型包括直线段、左转和右转,无人机在这些基本运动模型下可以生成各种形状的路径。最终的路径由这些基本运动模型的组合而成,使得无人机从起点到终点沿着最短路径飞行,同时满足了无人机的动力学和操控性约束。杜宾斯路径规划适用于需要考虑无人机转弯半径和操控性的情况,例如在有障碍物的环境中飞行、需要避障或者需要飞行最短距离的场景下。这种方法在无人机领域的自主导航、航迹规划和飞行控制等方面有广泛的应用。
📚2 运行结果
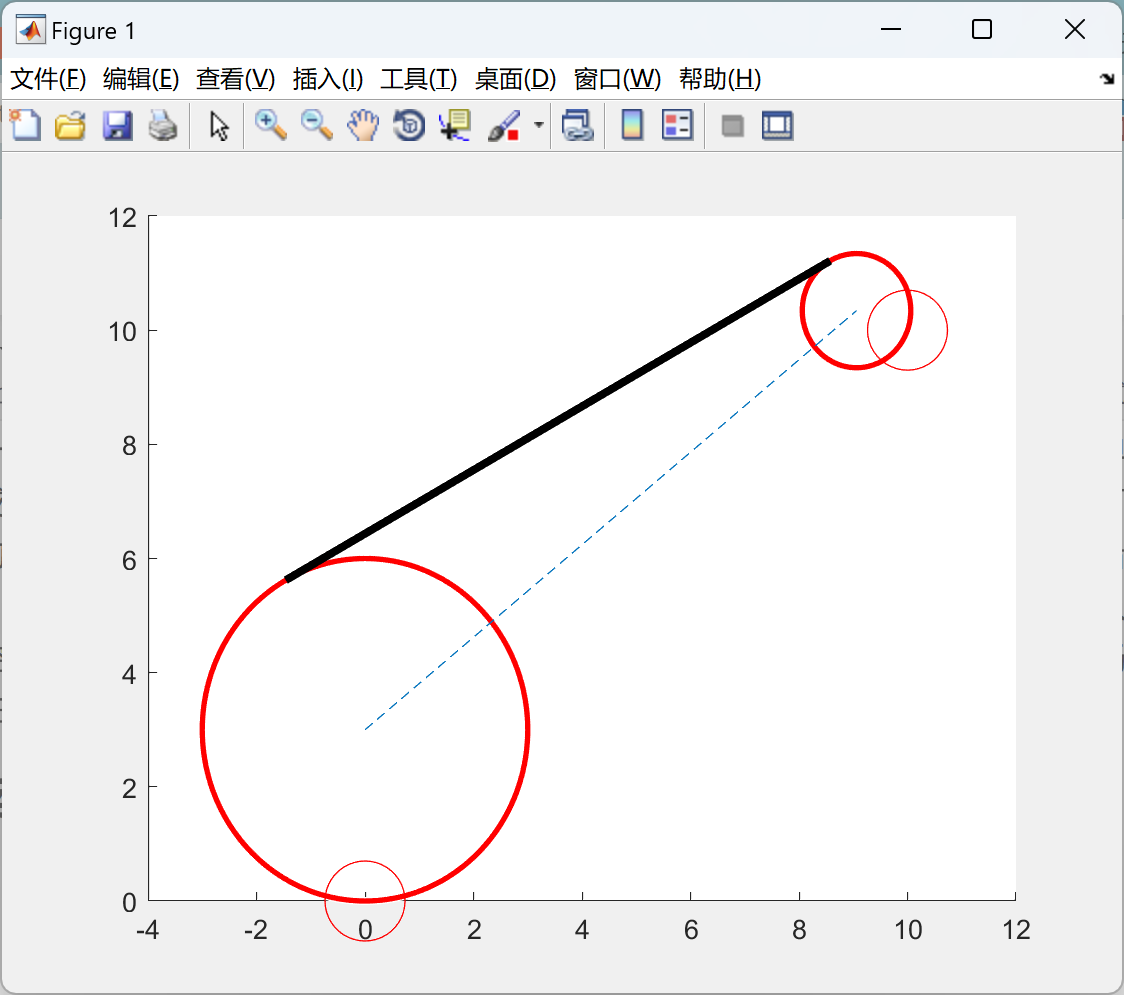
部分代码:
%starting Pose
xs = 0; ys = 0; phis=deg2rad(0);
%final Pose
xf = 10; yf = 10; phif=deg2rad(70);
%curvature constraints:
rhos = 3; rhof = 1;
%center of curvature circles:
xcs = xs - rhos*cos(phis - pi/2);
ycs = ys - rhos*sin(phis - pi/2);
xcf = xf - rhof*cos(phif - pi/2);
ycf = xf - rhof*sin(phif - pi/2);
%tangent entry (E) and exit (X)
c = sqrt((xcs - xcf)^2 + (ycs-ycf)^2);
alpha = asin((rhof-rhos)/c);
beta = atan2(ycf-ycs, xcf - xcs);
%E
phi = alpha+beta +pi/2; % left turn
% phi = beta-alpha +3*pi/2; % right turn
xPX = xcs + rhos*cos(phi);
yPX = ycs + rhos*sin(phi);
%X
phi = alpha+beta +pi/2; % left turn
% phi = beta-alpha +3*pi/2; %right turn
xPN = xcf + rhof*cos(phi);
yPN = ycf + rhof*sin(phi);
close all;
figure()
hold on
%plot circles:
centers = [xcs ycs; xcf ycf]; radii = [rhos; rhof];
viscircles(centers,radii)
%plot poses:
plot(xs, ys, 'ro', 'MarkerSize', 30);
plot(xf, yf, 'ro', 'MarkerSize', 30);
%plot center line
xc = [xcs xcf];
yc = [ycs ycf];
plot(xc, yc, '--')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]朱启梦,孙金华,杨柳,等.基于无人机倾斜摄影的三维绿量估算[J/OL].河南科学:1-11[2024-04-20].http://kns.cnki.net/kcms/detail/41.1084.N.20240417.1831.002.html.
[2]邓舒豪,雷涛,金贤球,等.燃料电池无人机混合电源系统稳定性及功率控制方法研究[J/OL].航空学报:1-16[2024-04-20].http://kns.cnki.net/kcms/detail/11.1929.v.20240419.1411.002.html.















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









