






 文章介绍了电机驱动中MOS管(NMOS和PMOS)的应用,包括如何通过PWM控制减少导通损耗,以及为何在电机接口添加二极管以消除反电动势。此外,还提到了H桥由四个NMOS管构成,用于电机正反转控制的特点。
文章介绍了电机驱动中MOS管(NMOS和PMOS)的应用,包括如何通过PWM控制减少导通损耗,以及为何在电机接口添加二极管以消除反电动势。此外,还提到了H桥由四个NMOS管构成,用于电机正反转控制的特点。
电机驱动-MOS管-PWM
1.电路驱动
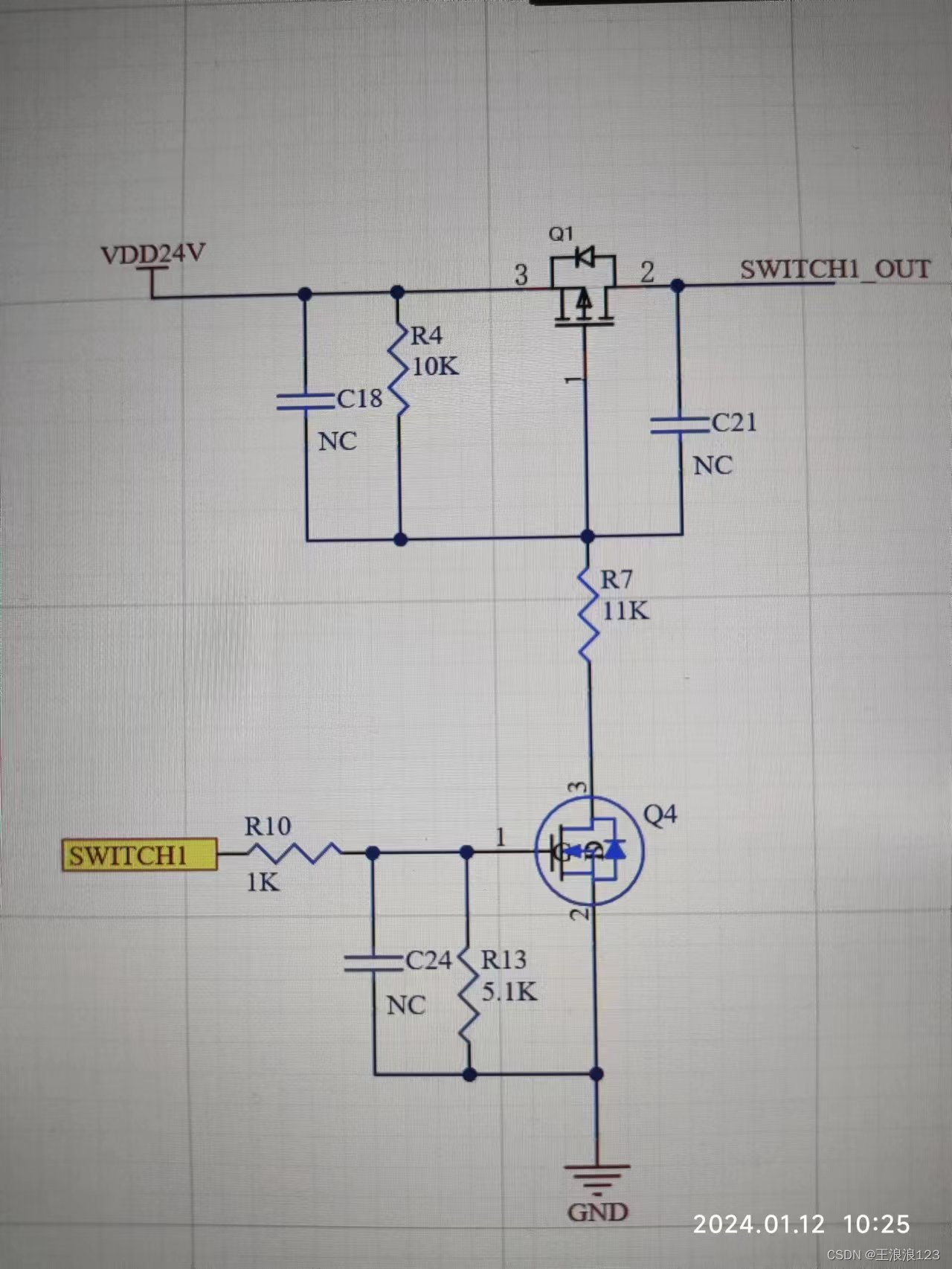
这个是简单的mos管开关驱动,Nmos+Pmos的驱动方式。
CPU控制nmos的通断从而控制pmos的通断,来实现电源(24v)的工作。
nmos-pmos同:
不管是NMOS还是PMOS,导通后都有导通电阻存在,这样电流就会在这个电阻上消耗能量,这部分消耗的能量叫做导通损耗。选择导通电阻小的MOS管会减小导通损耗。
*而且mos管的开关,是有时间限制的,所以在通过PWM去控制的时候,PWM的频率有跟MOS(PMOS)的开关时间达到一个非常舒服的状态。
nmos-pmos异:
NMOS的特性,Vgs大于一 定的值就会导通, 适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以了。
PMOS的特性,Vgs小于一 定的值就会 导通,适合用于源极接VCC时的情况(高端驱动)。但是,虽然PMOS可以很方便地用作高端驱动,但由于导通电阻大,价格贵,替换种类少等原因,在高端驱动中,通常还是使用NMOS。
2.消除电机反电动势
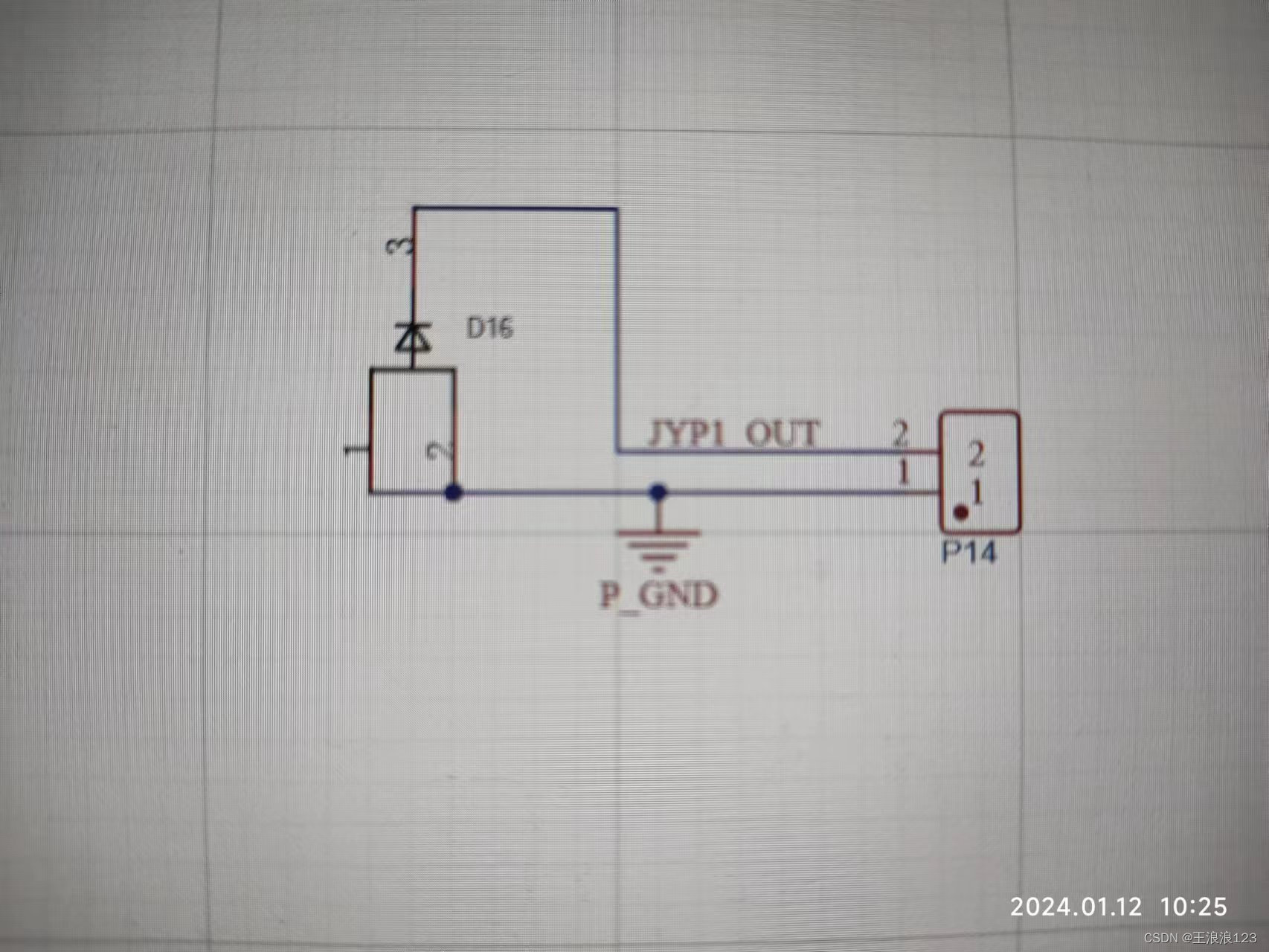
连接电机接口,为什么要加一个二极管呢?
对的,为了消除电机在开-关产生的反电动势(反向冲电)。其实在PMOS中是有一个二极管的,他本身就有着这样的功能,但是对PMOS的电器件的性能参数压力比较大。
你想想看,我上面是24V驱动电机开关,产生反向电动势(-24V),那么PMOS的压力就到了48V。而且,不只是大与个几V的电压就可以了。本身为了安全,在选择PMOS的时候,就要在24V的2倍以上,现在有了反电动势,最少需要3倍以上,安全是4倍(4*24V)。在PMOS的安全压差下,我们人为设计一个二极管,把反向电动势重新导回电机的正级。完成了电路的保护,同时让你的PWM波输出比较方。
3.H桥
这个先简单说说,H桥是4个NMOS管组成,可以控制电机的正反转。而且NMOS的开关时间一般比PMOS快,PWM产生的方波比较方,但是H桥跑不满100%。

















 3401
3401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









