









电机模块开发
L9110s概述 接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,但是不对,根据下节课实际调试 IA1输入高电平,IA1输入低电平,【OA1 OB1】电机正转; IA1输入低电平,IA1输入高电平,【OA1 OB1】电机反转; IA2输入高电平,IA2输入低电平,【OA2 OB2】电机正转; IA2输入低电平,IA2输入高电平,【OA2 OB2】电机反转;
接线
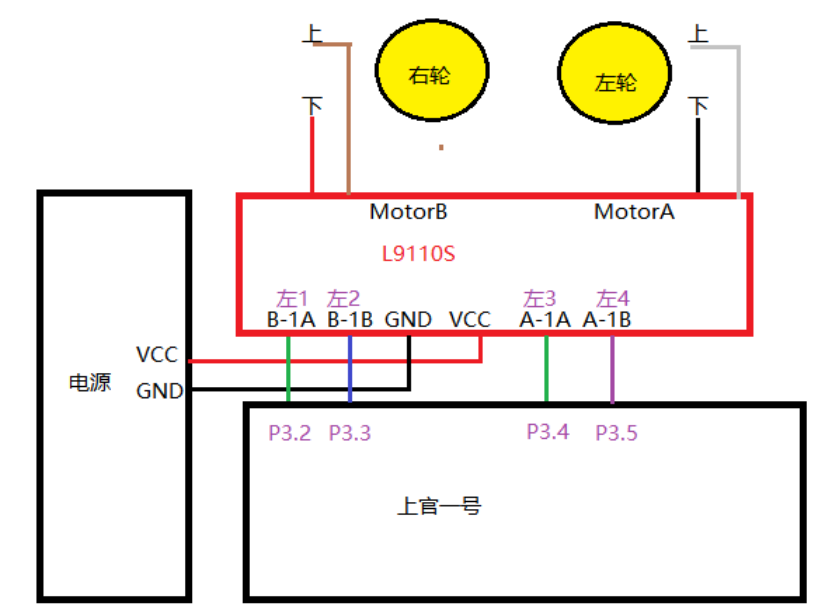
有个很重的事
有时候会发现小车动不起来,代码都正确,这时候很可能是L9110s和单片机没有共地!!!
2.代码-让小车动起来
//调试出小车前后左右控制
#include "reg52.h"
#include "intrins.h"
sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;
sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void goForward()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 1;
}
void goRight()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 0;
}
void goLeft()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 1;
}
void goBack()
{
LeftCon1A = 1;
LeftCon1B = 0;
RightCon1A = 1;
RightCon1B = 0;
}
void main()
{
w hile(1){
goForward();
Delay1000ms();
Delay1000ms();
goBack();
Delay1000ms();
Delay1000ms();
goLeft();
Delay1000ms();
Delay1000ms();
goRight();
Delay1000ms();
Delay1000ms();
}
}3.代码-串口(蓝牙)控制小车方向
uart.c
char buffer[SIZE];
void UartInit()
{
SCON = 0x50;
AUXR = 0x01;
TMOD &= 0xF0;
TMOD |= 0x20;
TH1 = 0xFD;
TL1 = 0xFD;
TR1 = 1;
EA = 1;
ES = 1;
}
void Uart_Handler() interrupt 4
{
static int i =0;//静态变量被初始化一次
char tmp;
if(RI == 1){ //中断处理函数中,对于接收中断的响应
RI = 0;//软件置1
tmp = SBUF;
if(tmp == 'M'){
i = 0;
}
buffer[i] = tmp;
i++;
if(buffer[0] == 'M'){
switch(buffer[1]){
case'1':
goForward();
break;
case'2':
goBack();
break;
case'3':
goLeft();
break;
case'4':
goRight();
break;
default:
stop();
break;
}
}
if(i == 12){
i = 0;
memset(buffer,'\0',SIZE);
}
}
}main.c
void main()
{
UartInit();
while(1){
}
}3.1加入点动模式
uart.c
void main()
{
UartInit();
while(1){
stop();
}
}uart.c
void Uart_Handler() interrupt 4
{
static int i =0;//静态变量被初始化一次
char tmp;
if(RI == 1){ //中断处理函数中,对于接收中断的响应
RI = 0;//软件置1
tmp = SBUF;
if(tmp == 'M'){
i = 0;
}
buffer[i] = tmp;
i++;
if(buffer[0] == 'M'){
switch(buffer[1]){
case'1':
goForward();
Delay10ms();
break;
case'2':
goBack();
Delay10ms();
break;
case'3':
goLeft();
Delay10ms();
break;
case'4':
goRight();
Delay10ms();
break;
default:
stop();
break;
}
}
if(i == 12){
i = 0;
memset(buffer,'\0',SIZE);
}
}
}4.PWM方式实现小车转向
原理: 左轮定时器0调速,右轮定时器1调速,那么左转就是右轮速度大于左轮! 开发:有手就行
//main.c
void main()
{
Time0Init();
Time1Init();
//UartInit();
while(1){
speedLeft = 10;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500us
speedRight = 40;
Delay1000ms();
Delay1000ms();
speedLeft = 40;
speedRight = 10;
Delay1000ms();
Delay1000ms();
}
}
//time.c
#include "motor.h"
#include "reg52.h"
char speedLeft;
char cntLeft = 0;
char speedRight;
char cntRight = 0;
void Time1Init()
{
//1. 配置定时器1工作模式位16位计时
TMOD &= 0x0F;
TMOD |= 0x1 << 4;
//2. 给初值,定一个0.5出来
TL1=0x33;
TH1=0xFE;
//3. 开始计时
TR1 = 1;
TF1 = 0;
//4. 打开定时器1中断
ET1 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
EA = 1;
}
void Time1Handler() interrupt 3
{
cntRight++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL1=0x33;
TH1=0xFE;
//控制PWM波
if(cntRight < speedRight){
//右前进
goForwardRight();
}else{
//停止
stopRight();
}
if(cntRight == 40){//爆表40次,经过了20ms
cntRight = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}
void Time0Handler() interrupt 1
{
cntLeft++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cntLeft < speedLeft){
//左前进
goForwardLeft();
}else{
//停止
stopLeft();
}
if(cntLeft == 40){//爆表40次,经过了20ms
cntLeft = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}














 4429
4429











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









