






一、总述
本文试图实现Unity中飞行的无人机组件可以探测进入到监测范围内的一些事件,如着火、违规停车等,并且将监测到的事件的地址打印在控制台。
参考:
二、过程
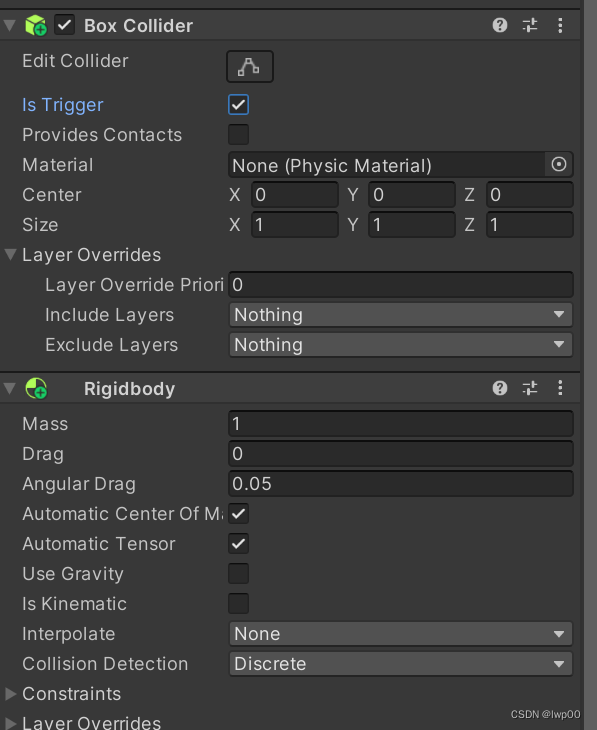
1.负责探测的无人机的配置
-
增加collider和rigidbody组件
-
开启is Trigger
-
关闭Use Gravity
2.编写跟随算法
为了确保跟随的无人机能够紧密但不过于紧密地跟随领航无人机,使用一种基于距离的跟随逻辑,该逻辑会根据两者之间的实际距离动态调整Drone02的移动速度。这样,如果Drone02离Drone01太远,它会加速追赶;如果太近,则会减速以避免碰撞。
using UnityEngine;
public class DistanceBasedFollow : MonoBehaviour
{
public Transform target; // 无人机01的Transform组件
public float desiredDistance = 10f; // 期望的跟随距离
public float minDistance = 15f; // 最小安全距离
public float maxDistance = 50f; // 最大允许距离
public float maxSpeed = 50f; // 无人机02的最大移动速度
public float accelerationFactor = 5f; // 加速因子,用于控制加速和减速的灵敏度
void Update()
{
if (target != null)
{
// 计算当前距离
float currentDistance = Vector3.Distance(transform.position, target.position);
// 根据当前距离和期望距离计算速度因子
float speedFactor = Mathf.Clamp01((currentDistance - minDistance) / (maxDistance - minDistance));
// 计算目标方向
Vector3 directionToTarget = (target.position - transform.position).normalized;
// 根据距离动态调整速度
float speed = Mathf.Lerp(0f, maxSpeed, speedFactor) * accelerationFactor;
// 计算移动量
Vector3 movement = directionToTarget * speed * Time.deltaTime;
// 移动Drone02
transform.position += movement;
}
}
}3.实现检测
- 编写代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class UAVdetect : MonoBehaviour
{
private void OnTriggerEnter(Collider other)
{
// 检查碰撞到的物体是否是我们想要检测的物体
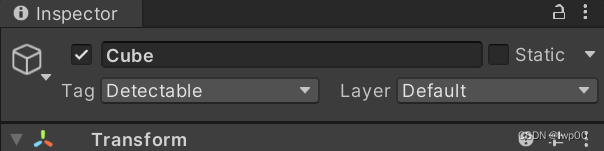
if (other.gameObject.tag == "Detectable") // 假设可检测的物体被设置为"Detectable"标签
{
// 在控制台打印检测到的信息
Debug.Log("Drone 02 has detected an object: " + other.gameObject.name);
}
}
}
- 给被检测物体添加tag
- 调整检测范围
调整collider的size即可调整范围

三、效果展示
可以看到:检测到之后就会在终端打印相关信息。
unity检测物体















 731
731











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









