







1、YOLOv8的基本原理
YOLOv8是一种前沿的目标检测技术,它基于先前YOLO版本在目标检测任务上的成功,进一步提升了性能和灵活性。主要的创新点包括一个新的骨干网络、一个新的 Ancher-Free 检测头和一个新的损失函数,可以在从 CPU 到 GPU 的各种硬件平台上运行。其主要网络结构如下:

2、软件主要功能
- 可进行火焰、烟雾及正常这3种状态的目标检测;
- 支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
- 界面可实时显示目标位置、目标总数、置信度、用时等信息;
- 支持图片或者视频的检测结果保存;
3、数据集与训练
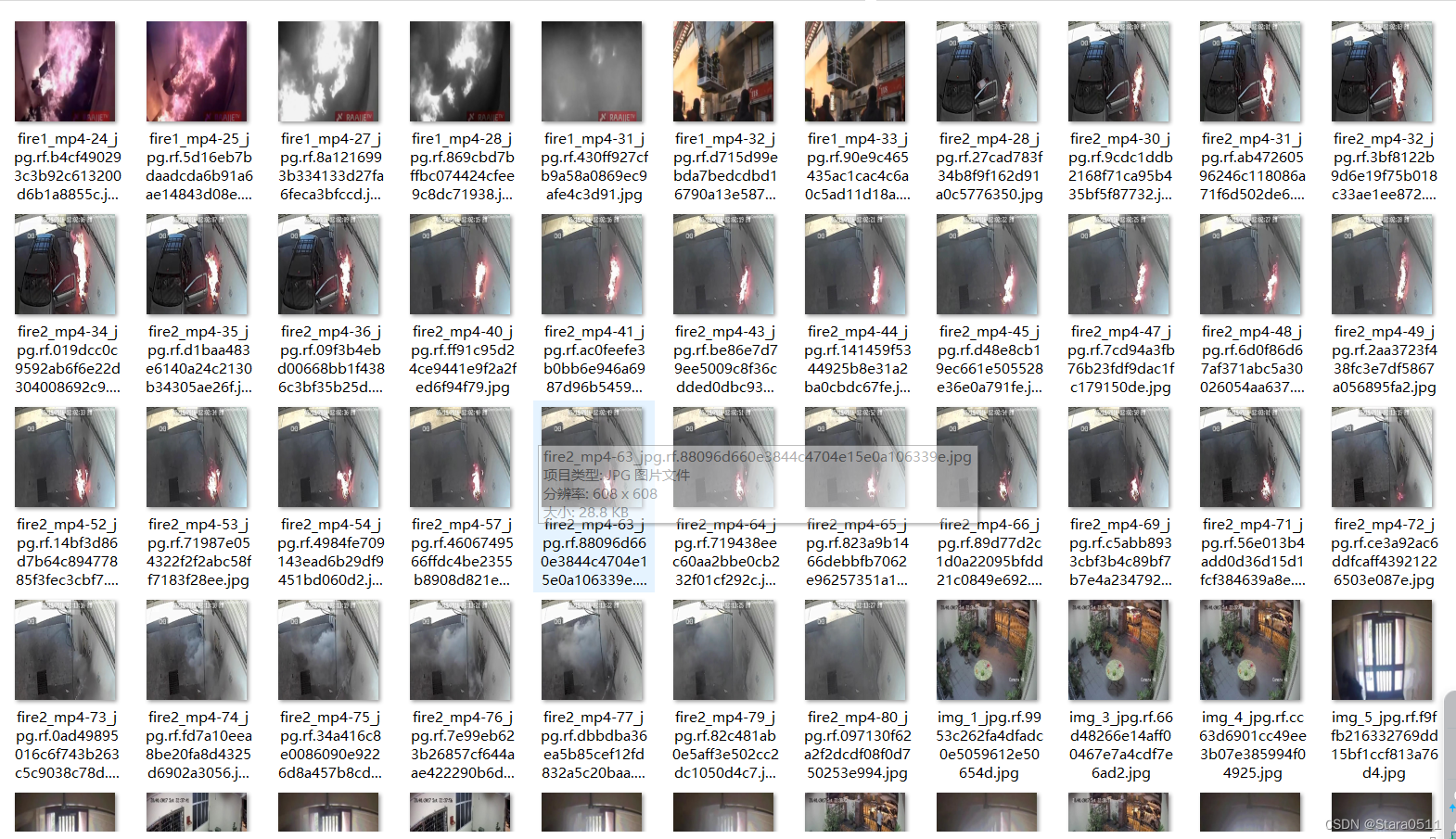
通过网络上搜集关于火焰及烟雾的各类图片,并使用LabelMe标注工具对每张图片中的目标边框(Bounding Box)及类别进行标注。一共包含979张图片,其中训练集包含877张图片,验证集包含47张图片,测试集包含55张图片部分图像及标注。
图片数据的存放格式如下,在项目目录中新建datasets目录,同时将跌倒检测的图片分为训练集与验证集放入helmetData目录下。
同时我们需要新建一个data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。YOLOv8在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。data.yaml的具体内容如下:
train: E:\MyCVProgram\FireSmokeDetection\datasets\FireSmokeData\train # train images (relative to 'path') 128 images
val: E 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1845
1845











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











