






 本文详细解释了三维空间中的平移和旋转齐次变换,包括4x4矩阵表示法,以及如何通过矩阵运算描述物体的位置和方向变化。还涉及齐次变换的逆运算,并以实际应用为例,如姿态估计中的坐标转换。
本文详细解释了三维空间中的平移和旋转齐次变换,包括4x4矩阵表示法,以及如何通过矩阵运算描述物体的位置和方向变化。还涉及齐次变换的逆运算,并以实际应用为例,如姿态估计中的坐标转换。
一、平移齐次坐标变换
4*4矩阵的右边三个数表示平移,如果原来的向量u的w=0,那么就是u+(ai+bj+ck)

二、旋转齐次变换矩阵
对应xyz三个轴的循环变换,注意负号的位置

三、物体的变换
用描述空间一点的变换方法来描述物体在空间的位置和方向。

先变换的矩阵乘在右边。
四、齐次变化的逆


五、平移坐标变换
A p = B p + A p B o {}^{A}p={}^{B}p+{}^{A}p_{B_{o}} Ap=Bp+ApBo
从 B B B到 A A A的平移坐标变换。

问题一
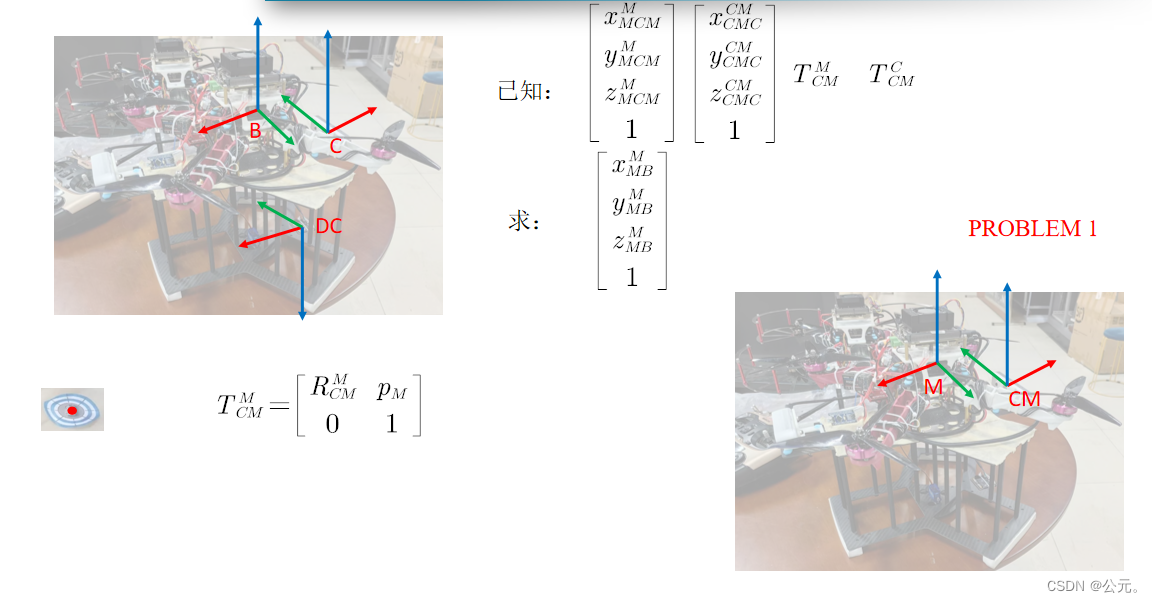

解:
CM先饶
z
z
z轴旋转180°,在沿
x
x
x轴反方向平移0.13m,得到M。
T
C
M
M
=
T
r
a
n
s
(
−
0.13
,
0
,
0
)
R
o
t
(
z
,
18
0
°
)
=
[
1
0
0
−
0.13
0
1
0
0
0
0
1
0
0
0
0
1
]
[
−
1
0
0
0
0
−
1
0
0
0
0
1
0
0
0
0
1
]
T_{CM}^{M}=Trans\left( -0.13,0,0 \right) Rot\left( z,180^° \right) =\left[ \begin{matrix} 1& 0& 0& -0.13\\ 0& 1& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \left[ \begin{matrix} -1& 0& 0& 0\\ 0& -1& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right]
TCMM=Trans(−0.13,0,0)Rot(z,180°)=
100001000010−0.13001
−10000−10000100001
T C M C = [ R C M C P C M C 0 1 ] = [ cos y sin y 0 d x − sin y cos y 0 d y 0 0 1 d z 0 0 0 1 ] T_{CM}^{C}=\left[ \begin{matrix} R_{CM}^{C}& P_{CM}^{C}\\ 0& 1\\ \end{matrix} \right] =\left[ \begin{matrix} \cos y& \sin y& 0& dx\\ -\sin y& \cos y& 0& dy\\ 0& 0& 1& dz\\ 0& 0& 0& 1\\ \end{matrix} \right] TCMC=[RCMC0PCMC1]= cosy−siny00sinycosy000010dxdydz1
齐次矩阵的逆:

T
C
M
M
T
C
C
M
=
[
−
cos
y
sin
y
0
d
x
cos
y
−
d
y
sin
y
−
0.13
−
sin
y
−
cos
y
0
d
x
sin
y
+
d
y
cos
y
0
0
1
−
d
z
0
0
0
1
]
T_{CM}^{M}T_{C}^{CM}=\left[ \begin{matrix} -\cos y& \sin y& 0& dx\cos y-dy\sin y-0.13\\ -\sin y& -\cos y& 0& dx\sin y+dy\cos y\\ 0& 0& 1& -dz\\ 0& 0& 0& 1\\ \end{matrix} \right]
TCMMTCCM=
−cosy−siny00siny−cosy000010dxcosy−dysiny−0.13dxsiny+dycosy−dz1
把上式代入,得到:
[
x
M
C
M
M
y
M
C
M
M
z
M
C
M
M
1
]
+
T
C
M
M
[
x
C
M
C
C
M
y
C
M
C
C
M
z
C
M
C
C
M
1
]
+
T
C
M
M
T
C
C
M
[
x
C
B
C
y
C
B
C
z
C
B
C
1
]
\left. \left[ \begin{array}{c} x_{MCM}^{M}\\ y_{MCM}^{M}\\ z_{MCM}^{M}\\ 1\\ \end{array} \right. \right] +T_{CM}^{M}\left[ \begin{array}{c} x_{CMC}^{CM}\\ y_{CMC}^{CM}\\ z_{CMC}^{CM}\\ 1\\ \end{array} \right] +T_{CM}^{M}T_{C}^{CM}\left[ \begin{array}{c} x_{CB}^{C}\\ y_{CB}^{C}\\ z_{CB}^{C}\\ 1\\ \end{array} \right]
xMCMMyMCMMzMCMM1
+TCMM
xCMCCMyCMCCMzCMCCM1
+TCMMTCCM
xCBCyCBCzCBC1
= [ 0.13 0 0 1 ] + [ − 1 0 0 − 0.13 0 − 1 0 0 0 0 1 0 0 0 0 1 ] [ x y z 1 ] + [ − cos y sin y 0 d x cos y − d y sin y − 0.13 − sin y − cos y 0 d x sin y + d y cos y 0 0 1 − d z 0 0 0 1 ] [ − 0.13 0 0 1 ] =\left[ \begin{array}{l} 0.13\\ 0\\ 0\\ 1\\ \end{array} \right] +\left[ \begin{matrix} -1& 0& 0& -0.13\\ 0& -1& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \left[ \begin{array}{l} x\\ y\\ z\\ 1\\ \end{array} \right] +\left[ \begin{matrix} -\cos y& \sin y& 0& dx\cos y-dy\sin y-0.13\\ -\sin y& -\cos y& 0& dx\sin y+dy\cos y\\ 0& 0& 1& -dz\\ 0& 0& 0& 1\\ \end{matrix} \right] \left[ \begin{array}{c} -0.13\\ 0\\ 0\\ 1\\ \end{array} \right] = 0.13001 + −10000−1000010−0.13001 xyz1 + −cosy−siny00siny−cosy000010dxcosy−dysiny−0.13dxsiny+dycosy−dz1 −0.13001
= [ − x + d x cos y − d y sin y + 0.13 cos y − 0.13 − y + d x sin y + d y cos y + 0.13 sin y z + d z 1 ] =\left[ \begin{array}{c} -x+dx\cos y-dy\sin y+0.13\cos y-0.13\\ -y+dx\sin y+dy\cos y+0.13\sin y\\ z+dz\\ 1\\ \end{array} \right] = −x+dxcosy−dysiny+0.13cosy−0.13−y+dxsiny+dycosy+0.13sinyz+dz1
注意到,在 d t dt dt时间内, d x , d y dx,dy dx,dy是小量,可以略去,剩下的部分就是如下代码:
(r,p,y)=tf.transformations.euler_from_quaternion([data.pose.pose.orientation.x,data.pose.pose.orientation.y,data.pose.pose.orientation.z,data.pose.pose.orientation.w])
local_pose.pose.position.x = -data.pose.pose.position.x - rtt_ctr_b * (1-math.cos(y))
local_pose.pose.position.y = - data.pose.pose.position.y + rtt_ctr_b * math.sin(y) #推导y
local_pose.pose.position.z = data.pose.pose.position.z #相机高度作为无人机的高度
local_pose.pose.orientation = data.pose.pose.orientation















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









