






0 前言
🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
🚩 基于单片机的蓝牙避障小车
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 项目分享:见文末!
设计功能:
- ✨可蓝牙操控小车进行扫地/灭火
- ✨可自动导航行驶自动避障
- ✨可扩展设计视觉模块 实现视觉追踪
- ✨可扩展机械臂进行实物抓取
- ✨可扩展图传 循迹 等相关功能
1 超声波避障小车原理
总体方案
系统采用51单片机作为核心控制单元用于智能车系统的控制,在超声波检测到障碍物之后,主控芯片根据距离值控制直流电机的转动,在与障碍物距离较大的情况下,快速前进,在与障碍物距离较小但还未到达临界转弯方向值的时候,慢速前进。在与障碍物距离很近需要转向避障时,方案上将尝试进行转向,来进行避障。
设计原理
该智能车系统可分为三个主要模块:单片机主控核心模块,传感器避障模块,电机驱动模块。系统主要原理是:通过超声波避障模块(即感测模块)实时监测路面情况并及时传输给单片机。由单片机主控核心模块根据感测模块给予的信息控制小车两电机转动工作状态。电机驱动模块驱动两电机转动,实现前进或者左、右转。
-
(1)单片机主控核心模块。在这次设计中我们选用已经学过的MCS-51单片机为核心作为控制模块。MCS-51系列单片机是美国Intel公司于1980年推出的产品,MCS-51系列单片机的影响及其深远,许多公司都推出了兼容系列单片机,使MCS-51内核成为一个8位单片机的标准,其典型产品有8031、8051、8751等等。
-
(2)传感器避障模块。智能车避障系统中的传感器一般分为接触型和非接触型两种,接触型相对比较简单。这里我们使用了超声波传感器进行测量,也即非接触型传感器。
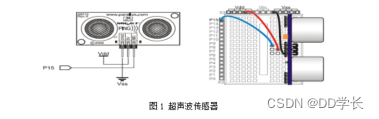
超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生震动产生的,在碰到杂质获分界面会产生显著反射从而形成反射回波,超声波传感器就是根据超声波在障碍物界面上的反射来判断检测物体的存在以及距离的。超声波频率高,波长短,绕射现象小,方向性好,再加上信息处理简单且价格低廉,所以这里我们使用28015-PING-v1.6超声波传感器对小车行进前方路况进行探测以及判断,它能实现从3cm到1.8m距离的测量,从而识别出范围内的障碍物。我们将其作为传感器避障模块,利用其返回的数据,从而实现小车避障的功能。图1为超声波传感器。
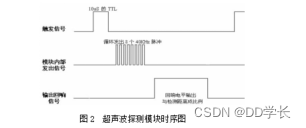
超声波探测模块的基本原理及使用方法如下:IO口触发,给Sin口至少5~10us的高电平,启动测量;模块自动发送8个40Khz的方波,自动检测是否有信号返回;有信号返回,通过IO口Sin输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离=(高电平时间*340)/ 2。超声波探测模块的时序图如图2所示。
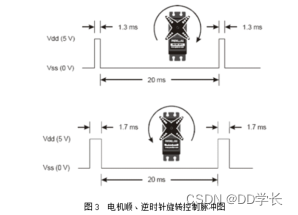
- (3)电机驱动模块。电机驱动模块是由两个伺服电机组成,伺服电机控制原理如下图3所示: 控制电机运动转速的是高电平持续的时间,当高电平持续时间为1.3ms时,电机顺时针全速旋转,当高电平持续时间1.7ms时,电机逆时针速旋转。
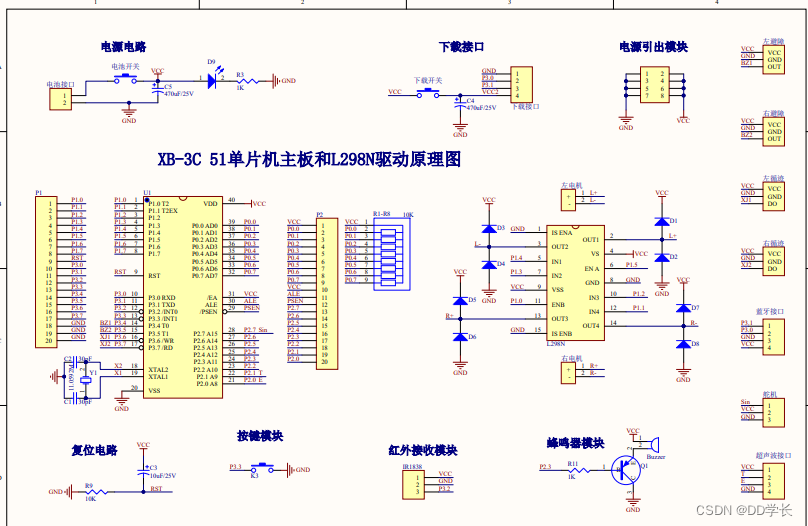
伺服电机与单片机接口的连接,图4为电机连接原理图和实际接线图,P1_0引脚的控制输出用来控制右的伺服电机,而P1_1则用来控制左边的伺服电机。
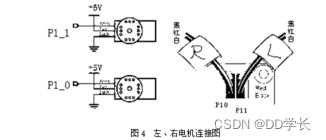
所以可知,若令左、右车轮电机高电平持续时间为1.5ms时,小车将处于静止状态。
若令左车轮电机高电平持续时间为1.7ms,右车轮电机高电平持续时间为1.3ms时,则左车轮电机逆时针,右车轮电机顺时针,小车将会以最快的速度前进。此时,若想改变小车的前进速度,则逐渐减小左电机的高电平时间,逐渐增加右电机的高电平时间,则可以减小车速。
同理可知,若令左车轮电机高电平持续时间为1.3ms,右车轮电机高电平持续时间为1.7ms时,则左车轮电机顺时针,右车轮电机逆时针,小车将会以最快的速度后退。
当需要转弯时,通过分析和测试我们可以知道,当小车想左转时,需令左右两轮均顺时针旋转,而当小车想右转时,需令左右两轮均逆时针旋转。
具体实施方案及程序流程图
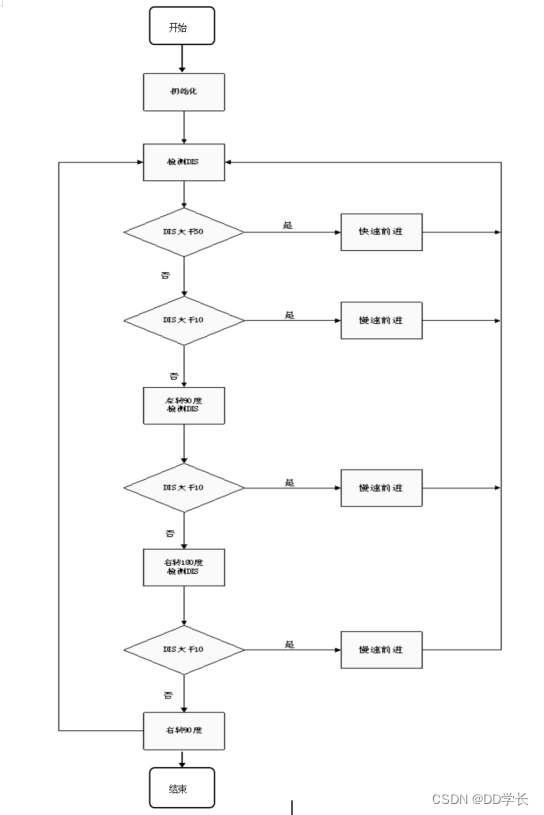
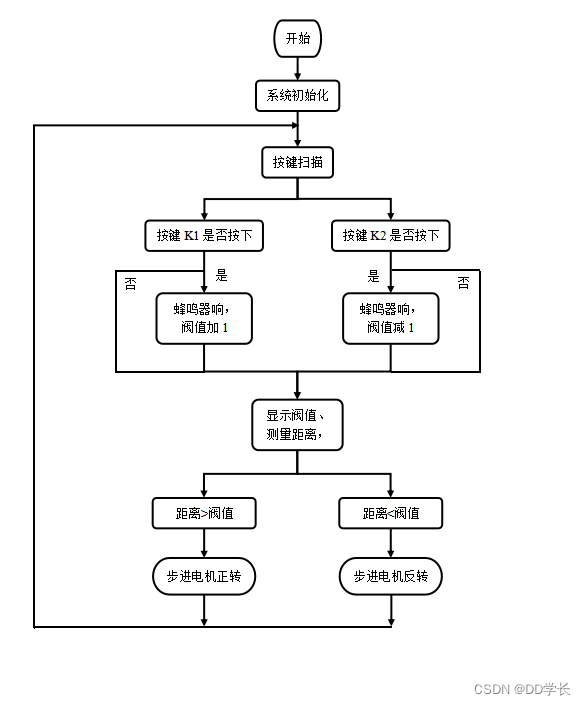
小车的避障流程如下:
(1)在车前方没有障碍物时,小车沿直线向前走。
(2)在车前方有障碍物时,小车能避开障碍物,避障方法如下:
- ①先向左边转90度,如果前面没有障碍物,再沿直线向前走;
- ②如果前面仍有障碍物,则向右转180度,如果前面没有障碍物,则沿直线向前行走;
- ③如果前面仍有障碍物,则向右90度,然后直线行。
主程序流程图如图所示
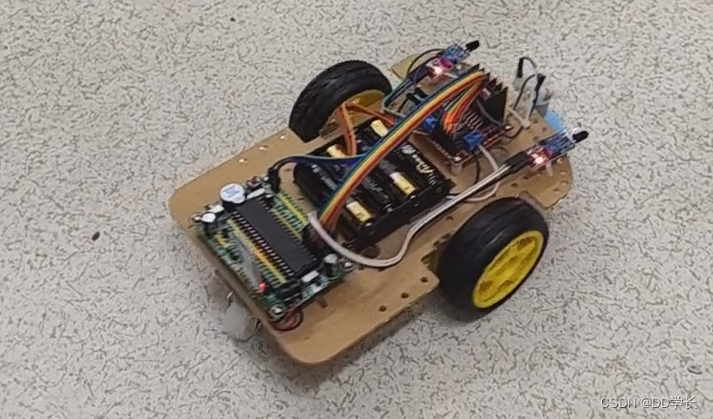
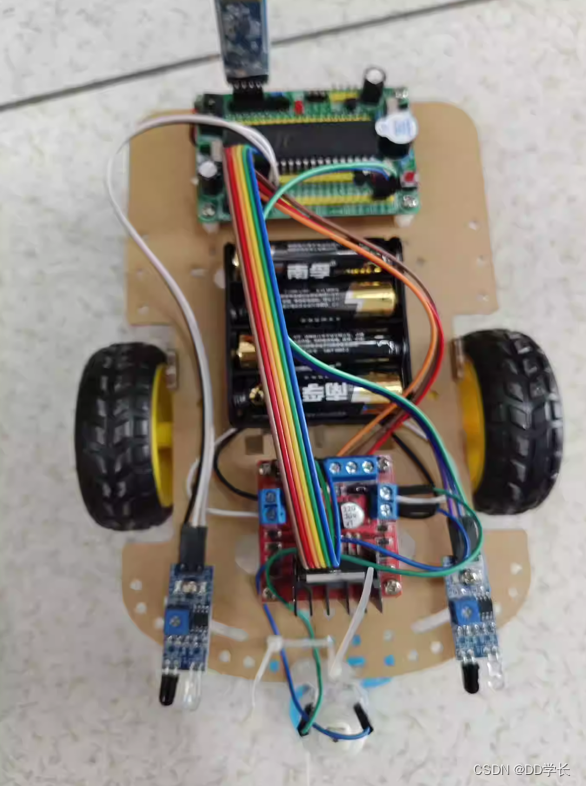
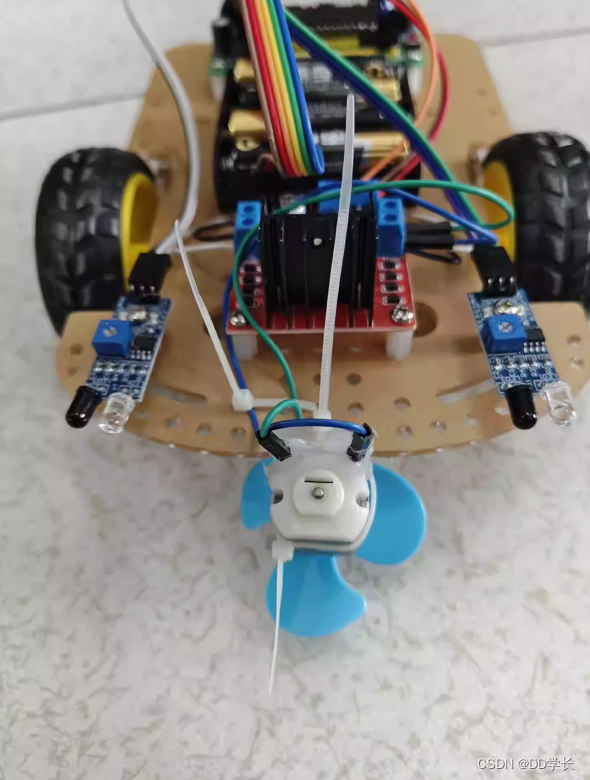
2 实现效果
毕业设计 基于单片机的蓝牙避障小车

3 硬件设计
4 软件流程设计
5 最后
包含内容
🧿 项目分享:见文末!















 6507
6507











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









