






Using of Neural Network-Based Controller to Obtain the Effect of Hub Motors Weight on Electric Vehicle Ride Comfort
摘要:
1.轮毂电机与车轮的直接连接会导致车辆的非簧载重量增加,因此非簧载重量的增加已成为电动汽车领域的重要研究之一。
2.研究四分之一的汽车悬架系统,轮毂电机的重量如何影响汽车的性能,乘客的舒适性和道路保持。
3.将结果与使用标准车轮进行比较。采用了一种众所周知的控制方法,基于神经网络的控制。仿真结果表明,由于增加轮毂电机而增加的车轮质量对汽车悬架系统的性能有很小的负面影响。
来自 <Home - Login.com For Sale>
1.introduction
(1)电动汽车转换从电网单元产生的能量。
----->根据美国环境保护署的数据,它大约有60%的动力提供给车轮,而传统汽车只转换20%的电能。使用电动汽车有助于减少排放和细颗粒物,而细颗粒物会导致空气污染、气候变化和健康问题
-------->轮毂电机驱动的电动汽车具有良好的灵活性,控制着车轮输出(T或N)的运动部件,特别适合于基于空间尺寸的最佳利用的车身设计和系统动力学。对电动汽车控制系统的研究主要集中在横摆角速度和牵伸力的控制上。
-------->通过控制驱动电机控制横摆角速度。牵引力管理可以提供电机扭矩,在加速时调节车轮的滑移量,控制汽车。
(2)能源利用和污染控制政策反映了电动汽车的整备重量在1000公斤左右。
每个轮毂电机重约30-52公斤,以适应汽车的动态特性。如果轮毂电机固定在车轮上,非簧载重量会增加。增加车轮的重量会增加惯性。
高速率的车轮惯性增加了加速度,而在运行情况下。由于这些力量,车轮接触和连接点受到相当高的压力。车辆的乘员也可能会注意到,由于这些力量,乘坐舒适性降低。
(3)著名的控制方法,即基于神经网络的控制器
调查的目标是通过频率分析和模拟来观察将重量从车辆的簧载质量转移到非簧载质量的影响。
了解是否有可能提高车辆的非簧载质量,将均匀车轮的理论数据或以前的数据与使用ANSYS和MATLAB等计算机软件计算的虚拟数据进行比较。
通过对主动悬架系统和被动悬架系统的研究,并与标准车轮进行比较,评价了轮毂电机重量对汽车性能的影响。
2.HUB MOTORS STRUCTURE 轮毂电机的结构
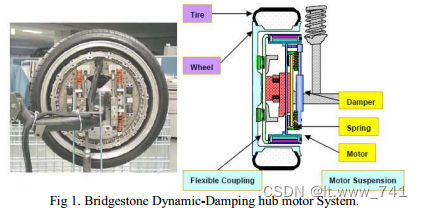
(1)普利司通动态阻尼轮毂电机系统的结构将轮毂、减速器和电机部分整合在一起,如图1所示。轮毂电机显著增加了车轮的重量,本文将对这种重量增加的影响进行评估。
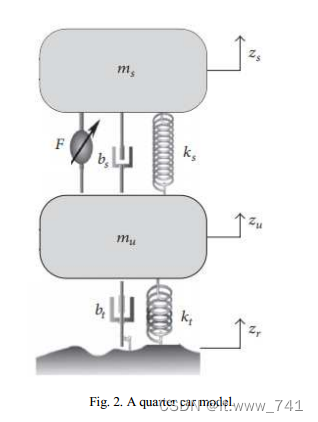
3.VEHICLE SUSPENSION MATHEMATICAL MODEL 车辆悬架数学模型
(1)采用2°自由度系统虚拟化汽车悬架(四分之一车型)。
---->在布置中,2个质量通过双组弹簧-阻尼系统进行悬挂。
---->2°自由度系统的优点是提供了质量悬架汽车系统和车轮的基本而精确的模型。该模型能够在真实驾驶环境下测量悬架和车轮偏转。
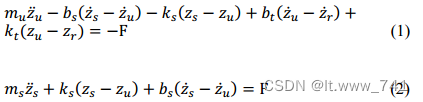
4.VEHICLE SUSPENSION DYNAMIC EQUATIONS 车辆悬架动力学方程
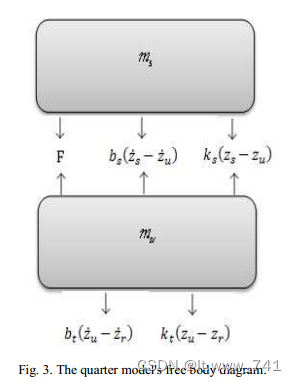
利用牛顿第二定律和自由体图,可以非常简单地画出以下运动方程:
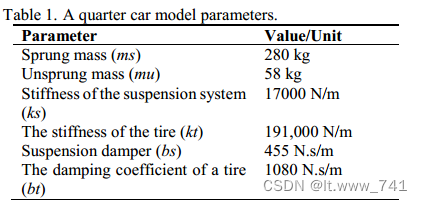
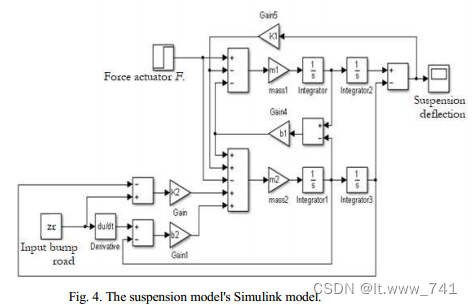
5.SYSTEM PARAMETERS AND SIMULINK MODEL 系统参数及simulink模型
在虚拟软件环境中使用的悬挂系统数据
(1)路轮廓
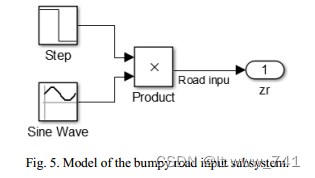
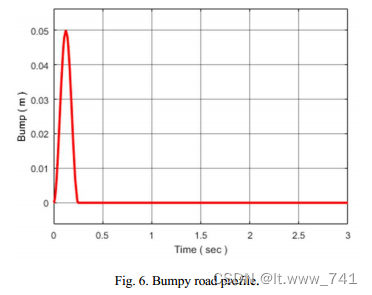
颠簸道路zr作为输入参数
单个颠簸(zr)的道路输入参数,描述道路状态、条件,并验证所开发的控制系统。
道路颠簸(道路轮廓/干扰)调整为声称颠簸高度为0.05米。
6.CONTROL STRATEGY 控制策略
人工神经网络(ann)的原理是 --> 利用机器学习算法方法和基于实验值与其协变量之间的多重非线性关系的分层“神经元”网络。
输入量或预测量被安排在最下层,输出量被安排在最上层,“隐藏神经元”被安排在中间层。
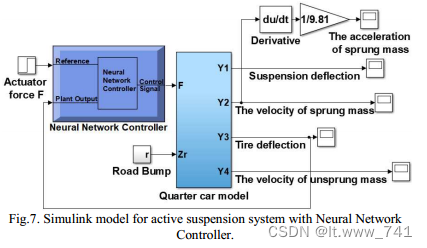
图7为控制器解剖神经网络的摄像机视图,该神经网络具有双输入和参考信号,具有设备输出和hold up控制屈服信号响应。
该网络利用基于机器的学习,包括在运行模拟之前提供存储库来提高技能或教授网络结构。图7中构建的悬架系统包含一个神经网络控制器,可以在SIMULINK档案中访问。
7.仿真结果
(1)利用MATLAB / SIMULINK对四分之一汽车悬架模型建立并运行由式1和式2推导的运动表达式的计算机仿真。由于路面颠簸被视为悬架系统的过程输入信号,因此悬架系统的性能将与驾驶舒适性、质量和道路操控性相关。
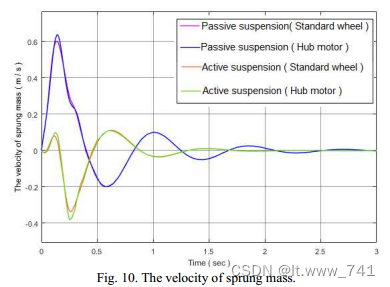
(2)采用人工神经网络的目的是为了获得一个低振幅的悬架和轮胎挠度,簧载质量加速度。
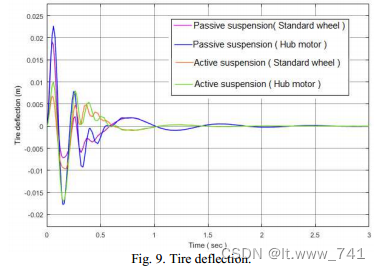
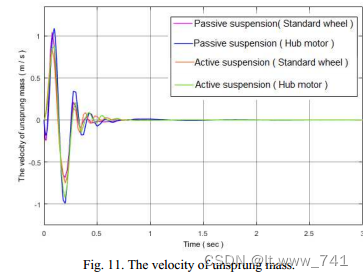
图8-12描述了当使用轮毂电机和标准车轮时,主动式和被动式悬架系统完成颠簸轮廓。
|
悬架挠度 |
轮胎侧偏 |
|
簧载质量速度 |
非簧载质量速度 |

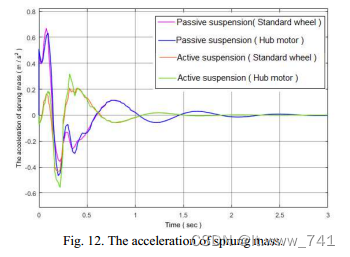
簧载质量加速度
8.结论
(1)得到四分之一车辆模型的数学表达式后,研究了被动悬架和主动悬架两种情况下的系统性能。
(2)采用轮毂电机对增加车辆的轮重(非簧载质量)有明显的效果。增加轮胎或车轮偏转和簧载的加速度是两个不太明显的影响。
(3)尽量减少轮毂电机的重量,使其能够有效地用作电动或混合动力汽车的推进装置















 1340
1340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









