







 博客围绕广义最小二乘估计展开,先推导其估计过程,将误差协方差阵为正定阵的回归模型变换为已讨论过的情况。接着阐述其性质,证明广义最小二乘估计是最优的且优于最小二乘估计。还给出简单例子,指出实际应用中确定协方差阵形式较难。
博客围绕广义最小二乘估计展开,先推导其估计过程,将误差协方差阵为正定阵的回归模型变换为已讨论过的情况。接着阐述其性质,证明广义最小二乘估计是最优的且优于最小二乘估计。还给出简单例子,指出实际应用中确定协方差阵形式较难。
目录
一、广义最小二乘估计的推导
在前面的讨论中,我们总是假设线性回归模型的误差是等方差且不相关的,即。但在很多情况下,这个假设总是可以认为近似地成立。但是,像在
所指出的,仍然有许多实际问题,经过残差分析后,我们不能认为这些假设是合适的,它们的误差方差可能不相等,也可能彼此相关。这时,误差向量的协方差阵
,这里
为一个正定阵,当然
往往包含有位置参数。为简单计,在这一节的讨论中,我们假定
是完全已知的。我们要讨论的回归模型具有如下形式:
为了求参数的估计,我们经过适当变换,把它化成前面讨论过的情形,既然是正定阵,于是存在n*n的正交阵P使其对角化:
,这里
是
的特征值。记
。则
,称
是
的平方根阵。用
左乘
,记
。因为
于是我们得出如下线性回归模型:
这就是我们已经讨论过的情况在。在这个新模型中,的最小二乘估计为
一般,我们称为
的广义最小二乘估计,也有一些作者称
为
的
估计,下面的定理概括了这个估计得统计性质。
二、广义最小二乘估计的性质——【定理3.6.1】
1.定理内容
对于线性回归模型,有
- 对任意P*1已知向量c,
为
的唯一最小方差无偏估计
2.定理证明
设
是
的任一线性无偏估计,对于模型(3.6.2),我们有
这就是说,对变换后的模型而言,是
的最小二乘估计,而
是
的一个无偏估计,由定理3.2.2知,
,并且等号成立当且仅当
,定理证毕。
3.定理说明
定理3.6.1(c)就是一般情况下的定理。它表明,在一般线性回归模型(3.6.1)中,广义最小二乘估计
是最优的。但是,如果我们把
表达式中的
换成单位阵
,则得到
。称为简单最最小二乘估计,常常简称为最小二乘估计。容易证明,对于模型(3.6.1),
,即
仍是
的无偏估计。但这时对任意线性函数
,
只是
的一个无偏估计,它未必是最优的。我们称
和
分别为
的广义最小二乘估计和(简单)最小二乘估计。根据定理3.6.1(c),对一切P*1向量c有
,这就是说对于一般线性回归模型(3.6.1),广义最小二乘估计总是优于最小二乘估计。
三、简单例子
模型(3.6.1)的最简单例子是因变量的不同观测具有不等方差的情况,这时
这里可以有一些彼此相等。记
分别为设计矩阵X的n个行向量,则容易推出,这时
的广义最小二乘估计具有如下形式
从这个表达式我们可以看出,两个和式分别是和
的“加权和”,而所用的权都是
。因此文献中常常把(3.6.4)定义的
称为加权最小二乘估计。这里讲的是
皆已知的情况。在实际应用中,
往往是未知的,这时我们可以设法求得他们的估计
去代替。
对于一般线性回归模型,在实际应用中碰到的问题是确定协方差阵的形式,但这往往是十分困难的。一般我们总是从假设
入手,求得简单最小二乘估计,然后通过残差分析,对误差方差提供一些信息。另一种做法是,从问题本身的专业角度或其它方面,对误差向量提出一些特殊结构,这时误差协方差阵就具有特殊形式。
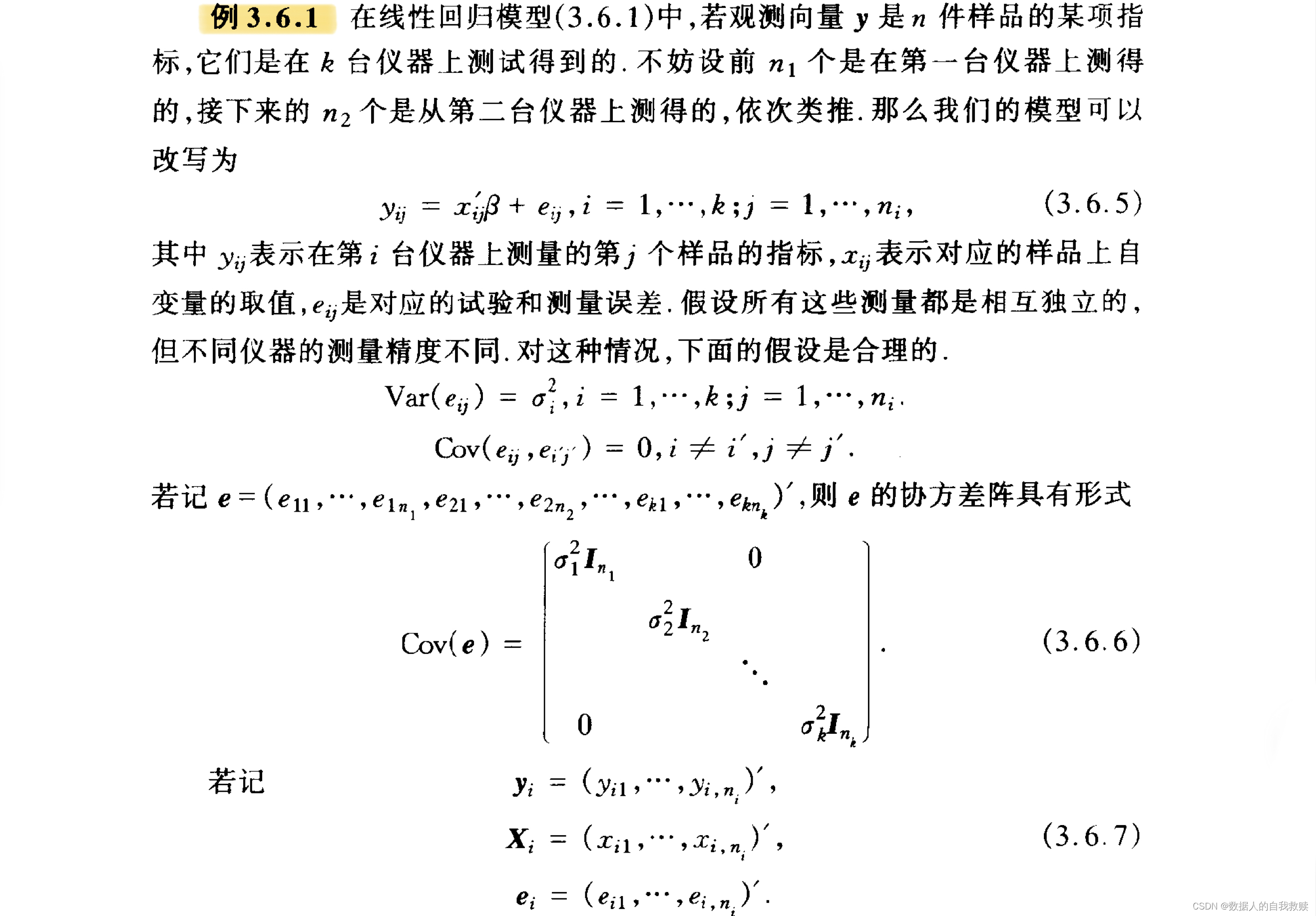
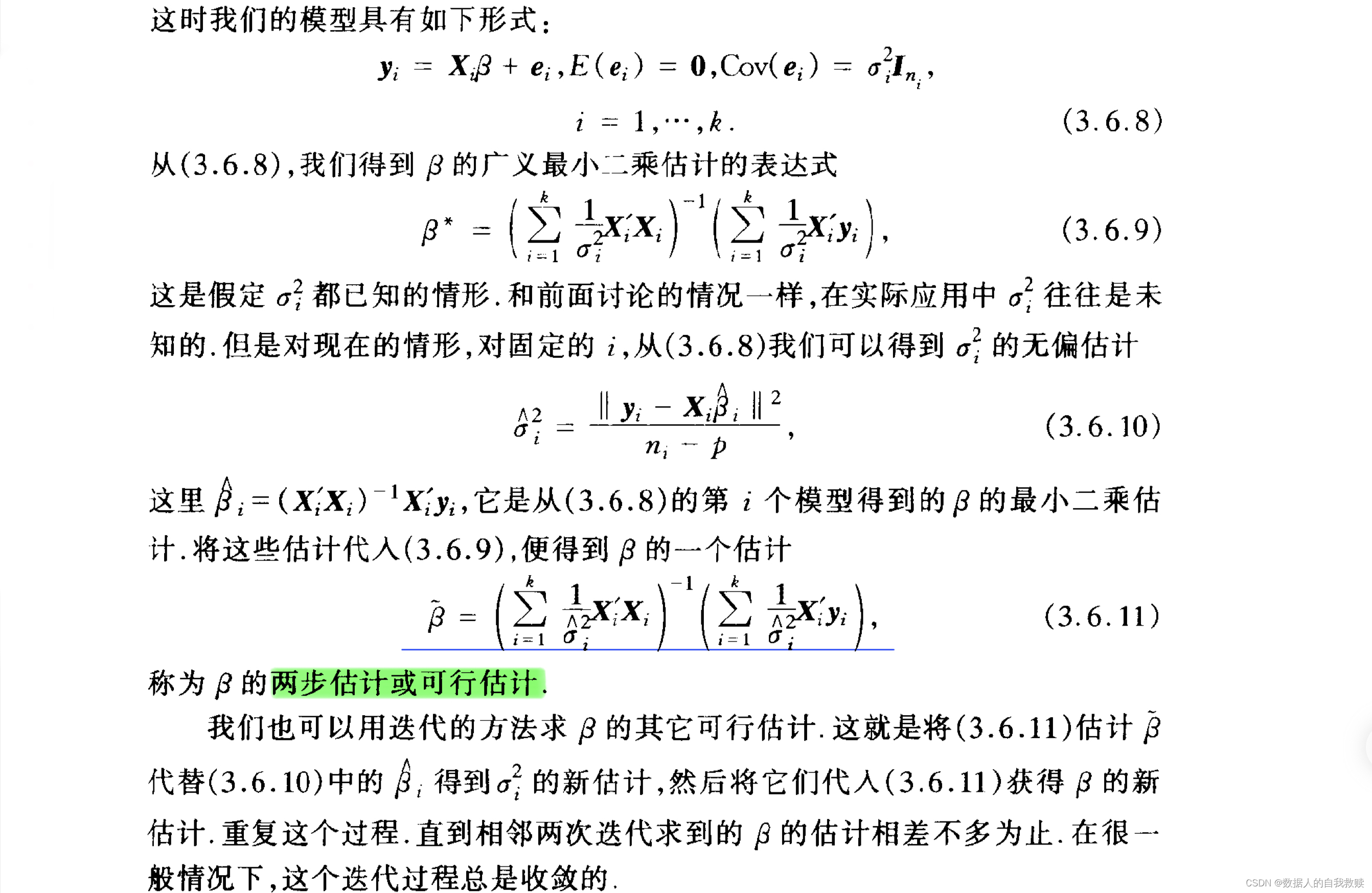
四、【例3.6.1】

















 576
576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









