






 本文详细介绍了无人机开发过程,包括硬件选择、传感器和执行器准备、飞行控制电路设计、电源系统选择以及软件开发、代码编写、模拟器测试和实际飞行调试。重点强调了使用ArduinoIDE和APM开发工具,以及优化和改进的重要性。
本文详细介绍了无人机开发过程,包括硬件选择、传感器和执行器准备、飞行控制电路设计、电源系统选择以及软件开发、代码编写、模拟器测试和实际飞行调试。重点强调了使用ArduinoIDE和APM开发工具,以及优化和改进的重要性。
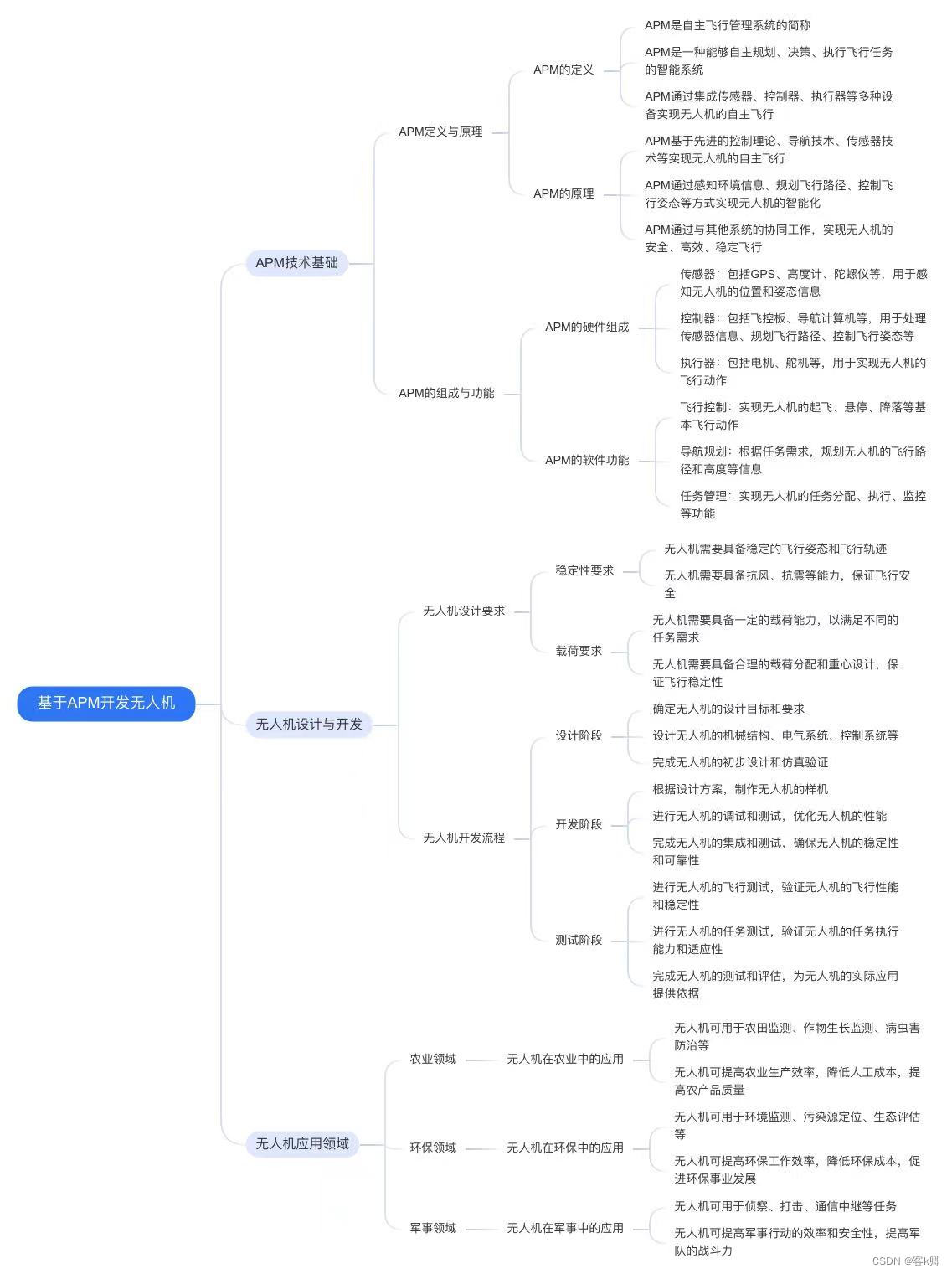
思维导图
硬件准备:
1. 选择硬件平台:选择适合你的需求和预算的APM硬件平台,比如Pixhawk或者APM 2.x。
2. 准备传感器和执行器:根据无人机的功能需求,选择合适的传感器(加速度计、陀螺仪、罗盘、气压计等)和执行器(电机、舵机等)。
3. 设计飞行控制电路:根据硬件平台的规格和需要,设计飞行控制电路。将传感器和执行器连接到主控制器,并确保电路稳定可靠。
4. 选择电源系统:设计适合无人机的电源系统,包括电池、电源管理模块等,以确保无人机能够稳定供电。
软件准备:
1. 安装开发环境:在计算机上安装Arduino IDE和APM开发工具。你可以从APM官方网站下载相关的开发工具和库。
2. 熟悉开发工具:学习如何使用Arduino IDE和APM开发工具。了解如何创建新的项目、导入库、编写代码等操作。
代码编写:
1. 导入示例代码:在Arduino IDE中导入APM开发工具库,并查看示例代码。这些示例代码涵盖了基本的飞行控制、传感器数据处理、通信等功能。
2. 编写飞行控制代码:根据无人机的飞行需求,编写飞行控制代码。使用姿态控制算法(如PID控制)来实现稳定的飞行。
3. 处理传感器数据:编写代码读取传感器数据,并进行滤波、校准等处理,以获取准确的飞行状态信息。
4. 实现通信功能:编写代码实现与地面站或者遥控器的通信功能,包括数据传输、命令控制等。
调试和测试:
1. 模拟器测试:在没有实际硬件的情况下,可以使用模拟器进行代码调试和测试。模拟器可以模拟无人机的飞行行为,帮助你验证代码的正确性。
2. 连接硬件测试:将开发板连接到实际的硬件平台上,并进行实际飞行测试。逐步测试飞行控制、传感器数据处理、通信等功能,确保无人机能够正常工作。
优化和改进:
1. 根据测试结果进行优化和改进,调整飞行控制参数、传感器校准等,以提升无人机的性能和稳定性。
2. 不断学习和尝试新的功能和技术,探索无人机开发的更多可能性。
3.关注客k卿后面持续更新

















 5472
5472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









