






Day3
主要是处理一下Carsim Run control的问题。
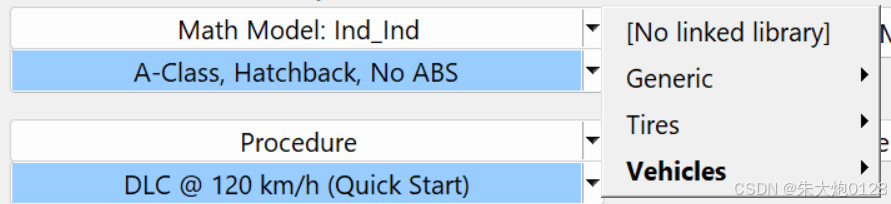
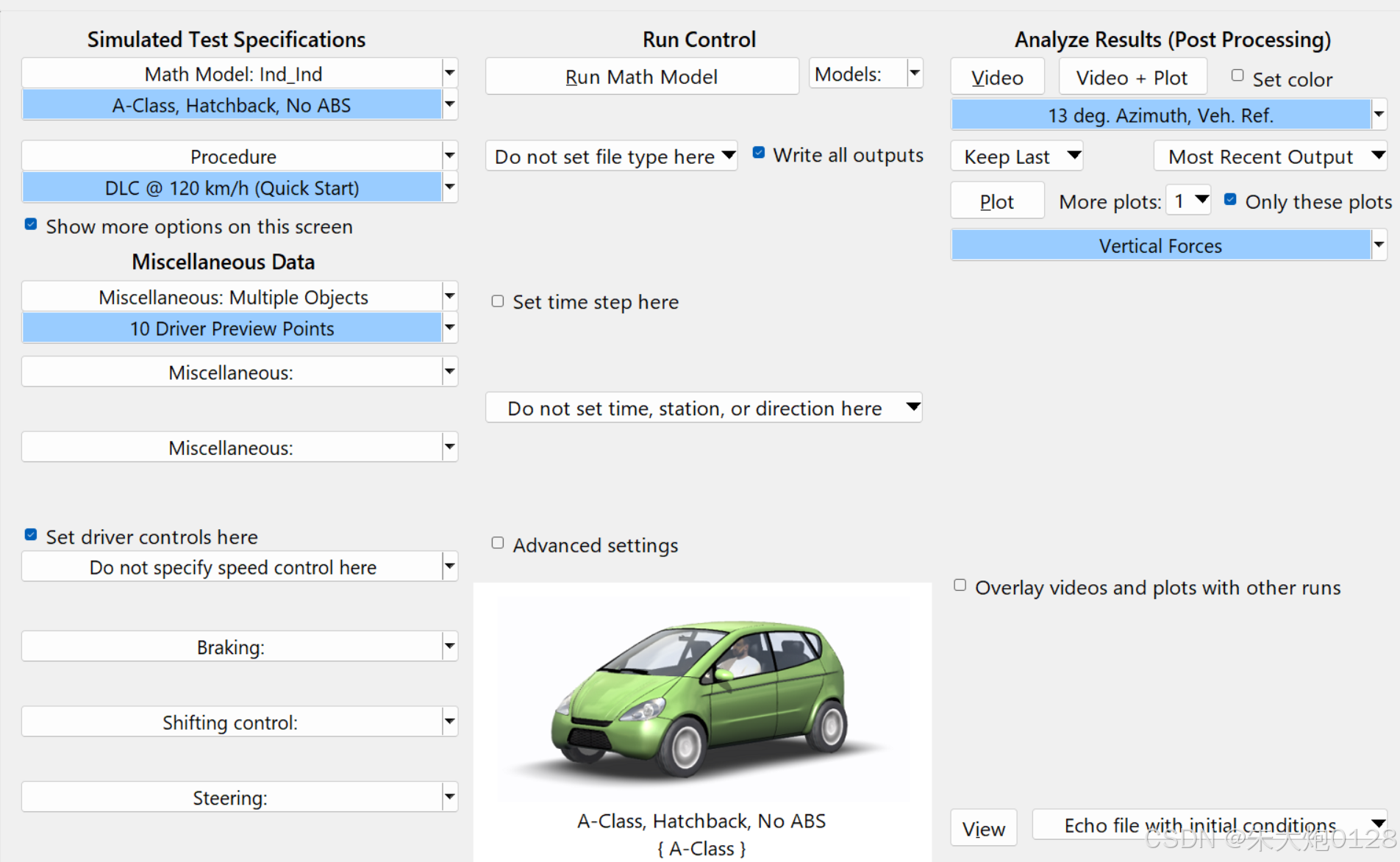
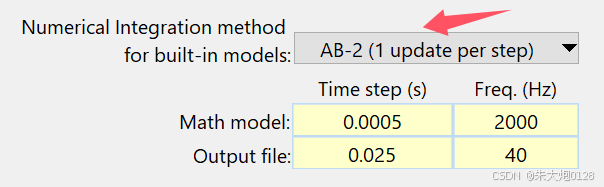
上图中,点击Math model右边的倒三角形,可以看到有三种math model的datesets供我们选择,第一种是基于Generic,也就是外部来源的,第二种是Tire,基于轮胎模型的,第三种就是车辆来源。我们选择Vehicle->Vehicle Assembly.
在Math Model下面那一栏选择车辆:
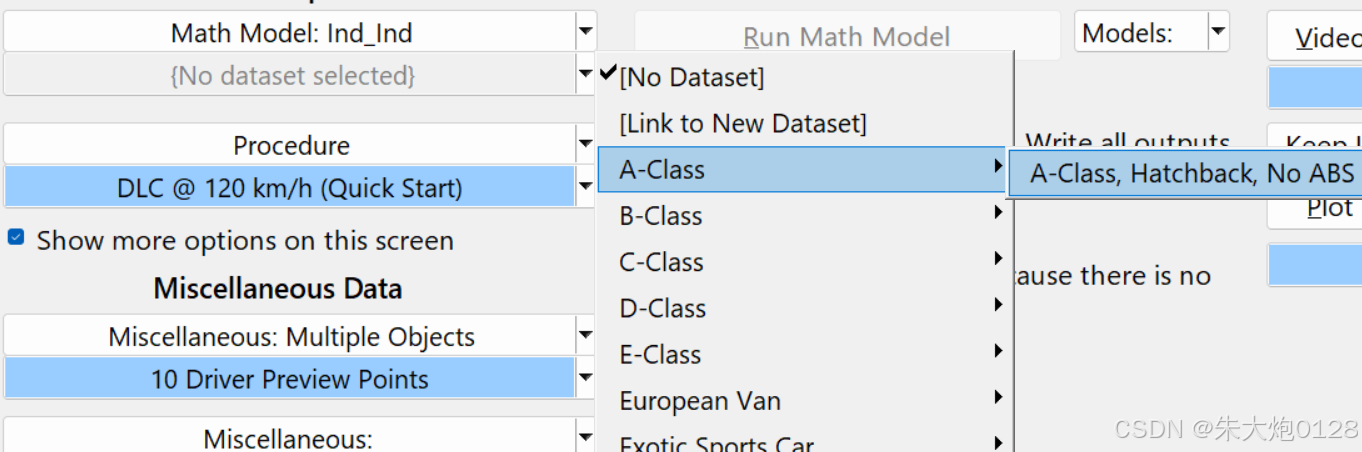
这些车是Day2里面导入的。
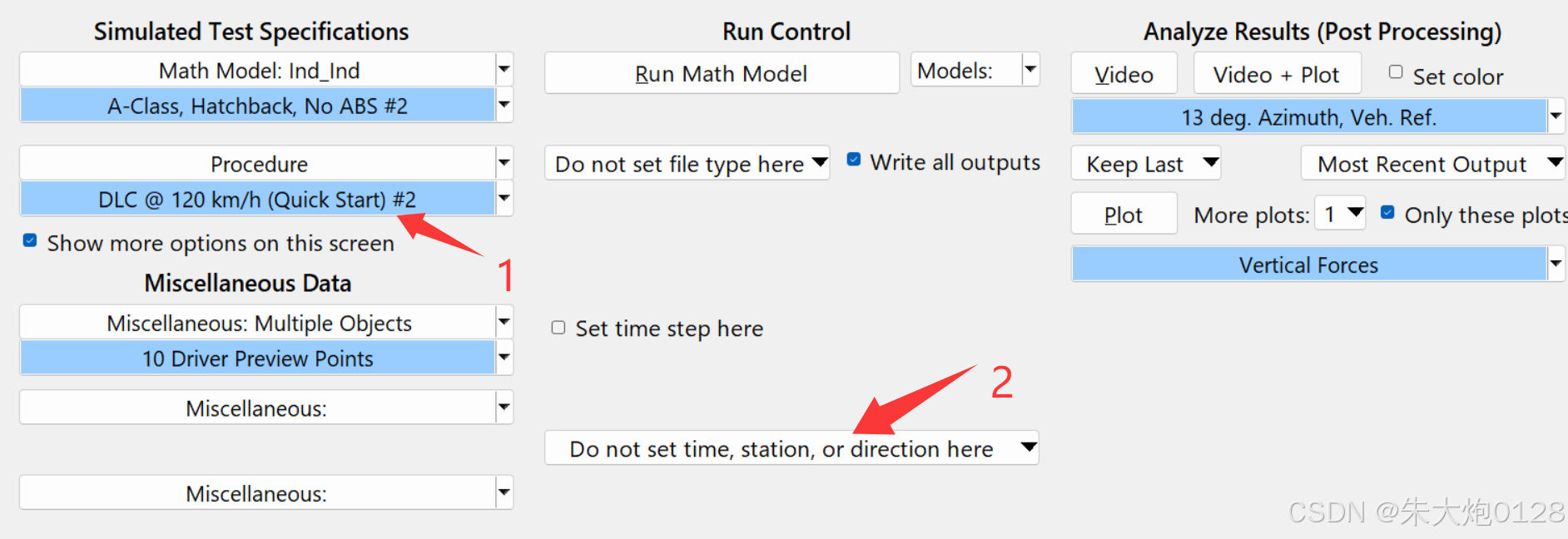
接下来选择控制方法,Precedure。进入到DLC @ 120km/h,设置参数(最好是先Duplicate,好保留官方默认的参数)。
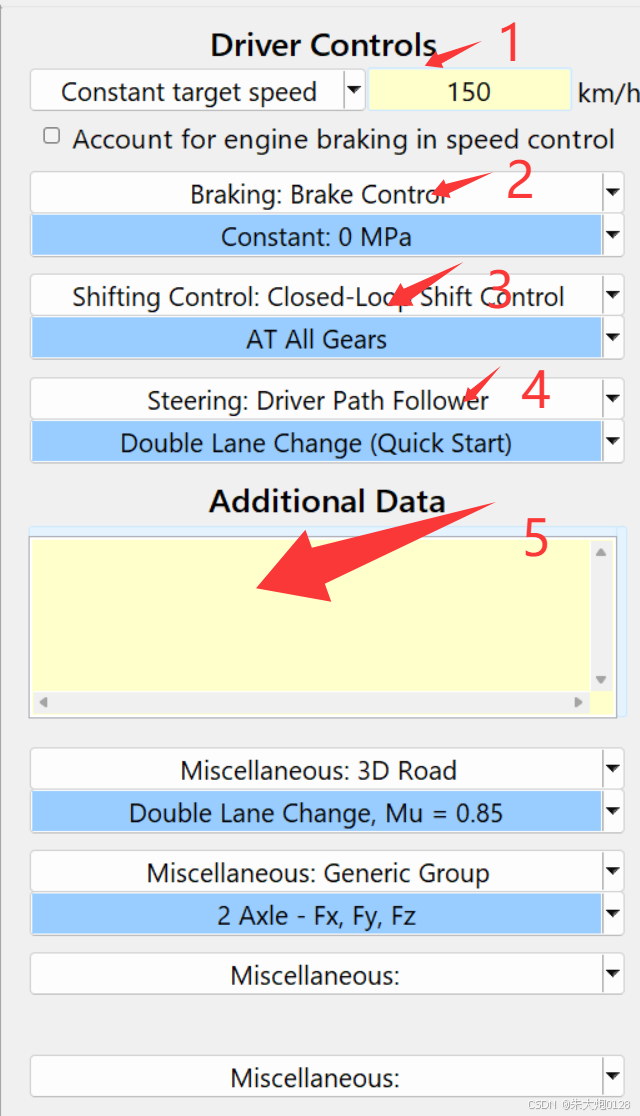
这一列都是驾驶员模型,箭头1是 速度,箭头2是刹车(可以选择踏板力或者制动强度),箭头3是变速器(可选择开环和闭环)设置。箭头4是转向控制(可以选择根据路径来设置,也可以链接到自己的控制算法来设置)。第五个是通过变量直接控制,比如你知道刹车的变量名是brake,你可以输入brake=1,来直接控制。Miscellaneous:3D Road是修改地图参数的,Miscellaneous:Generic Group是修改的力的数组的。
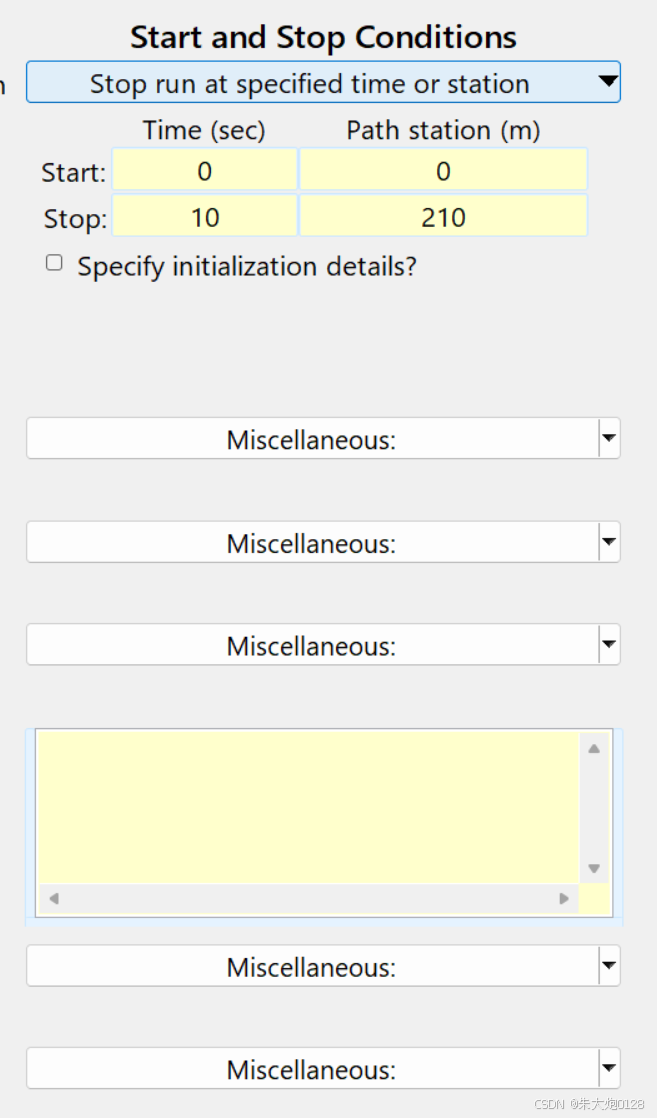
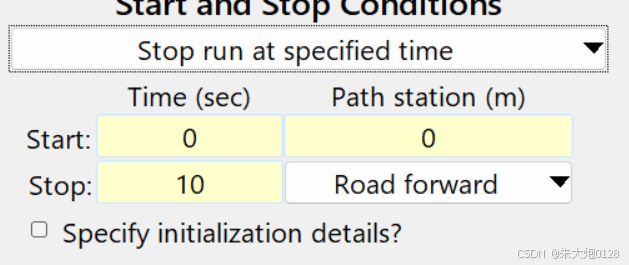
这个是起始条件与终点条件。后面会详细讲:
这一列就是线图的参数设置,和Home下面的线图参数设置道理是一样的:
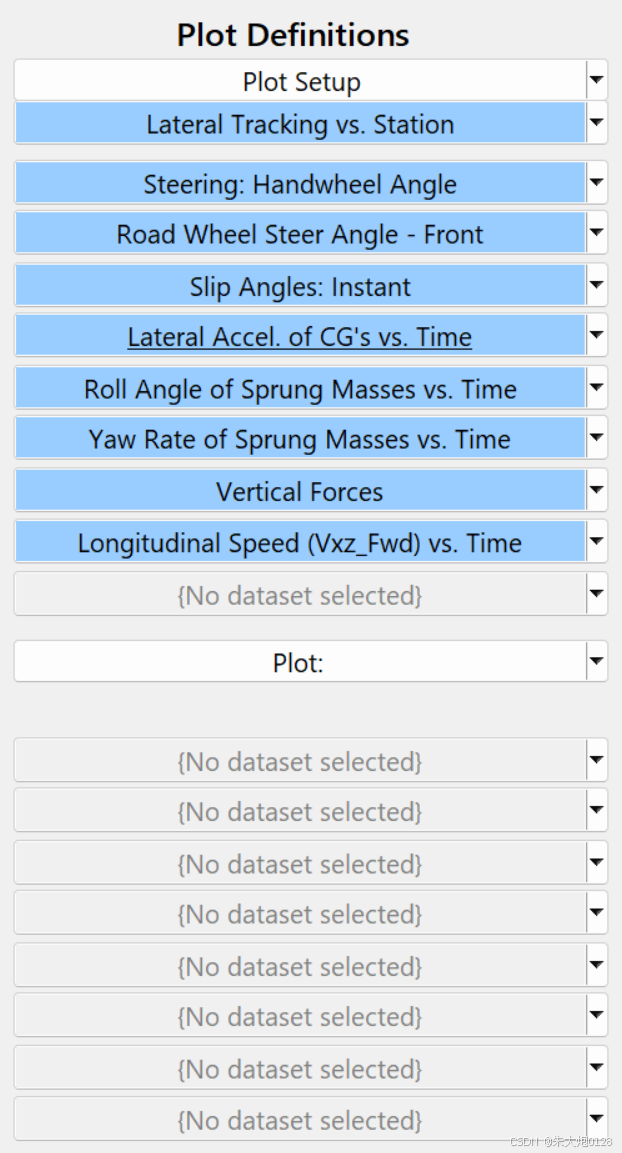
在这个页面中,有很多参数实际上都会带来重复的设置,Day1中提到过,Carsim对于重复的变量赋值是从上到下、从左到右的更新覆盖的。
回到这个下:

设置起始条件:
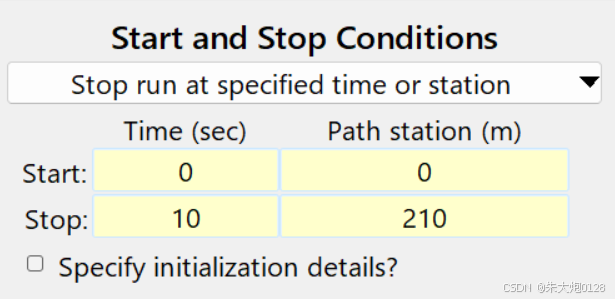
第一种可以设置的条件是:设置运行的时间和位置,比如系统默认的参数就是从0s 在0位置开始,到10s后,或者210米时结束。我们查看这个参数下的view:
![]()
这里就是运行的时间。只运行到了10s,我们将停止条件修改为5s,然后Run Math Model试试
![]()
现在的停止时间就是5s了。
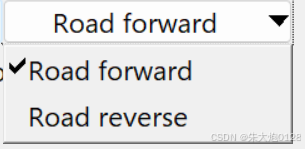
接下来换一种起始条件:
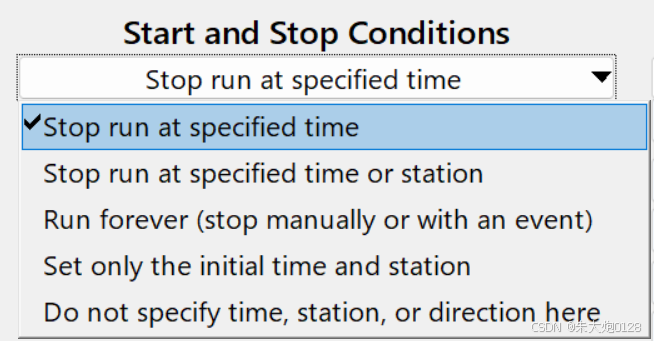
该条件的参数如上:仅设置停止时间,但是可以设置路面是正向运动还是反向运动(不是车在跑,还是路在跑) ,我们把路面运动设置为反向试试:
Run math Model后回到主页面查看view ,可以看到车越跑越远了。(实际上是路越跑越远了)

需要注意的是,在Home这个datastes下,注意自己在图中箭头的位置设置参数 。记住Carsim的参数读取规则:从上到下,从左到右。
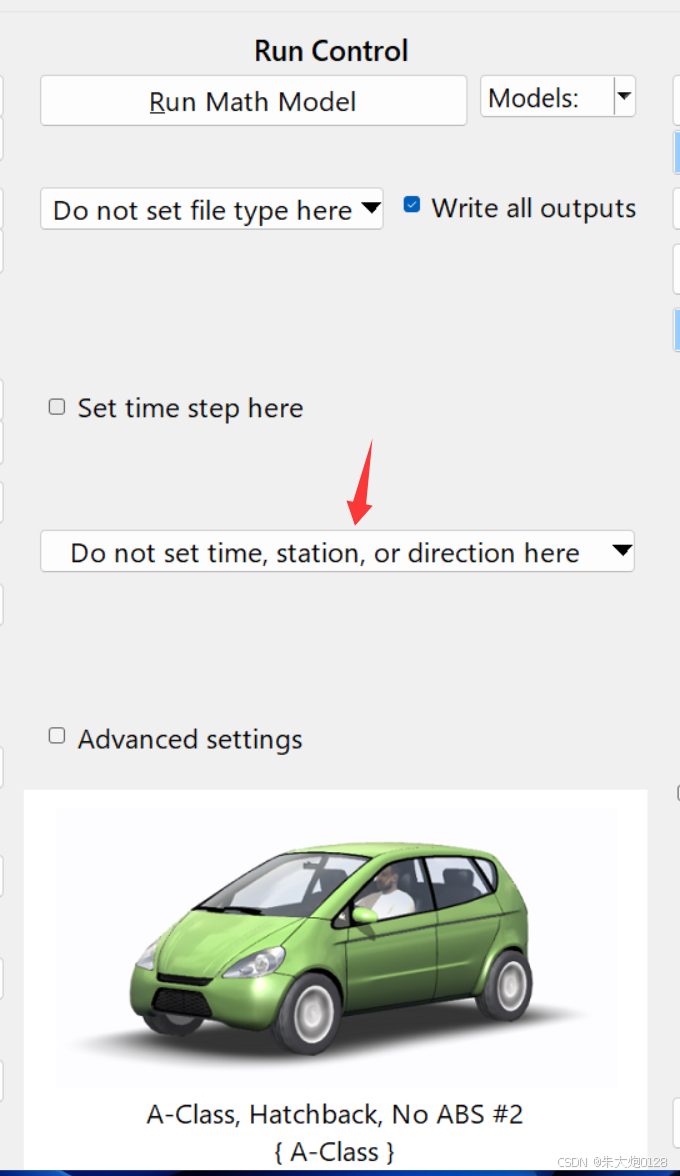
我们刚才设置的参数是在 箭头1的位置,而Home页面有个箭头2的设置的话,就会覆盖掉箭头1的设置。
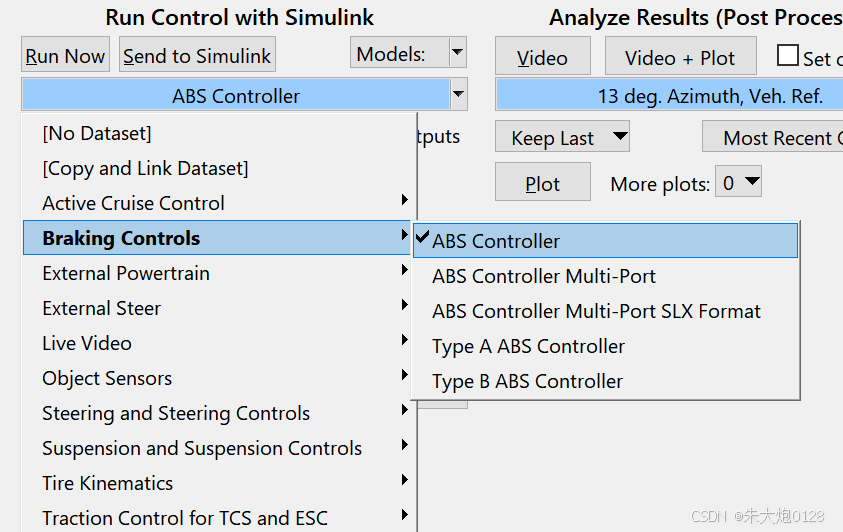
接下来介绍Run Control下的一些东西(关于Simulink)。
当没有联合仿真的需求时,我们仅仅单独编译Carsim的话,直接Run Math Model就可以了。但是我们如果有联合仿真的需求,就可以点击Models:,进行需求的选择。这里以Simulink为例子。
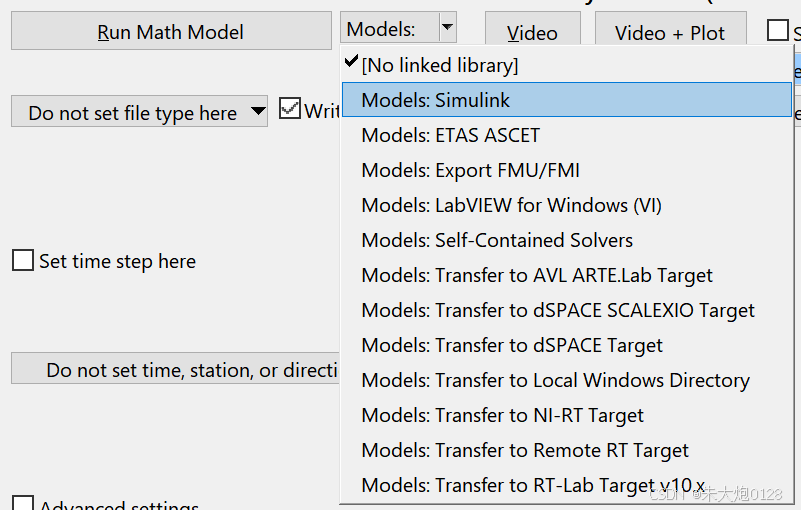
点击以后,变成这样:
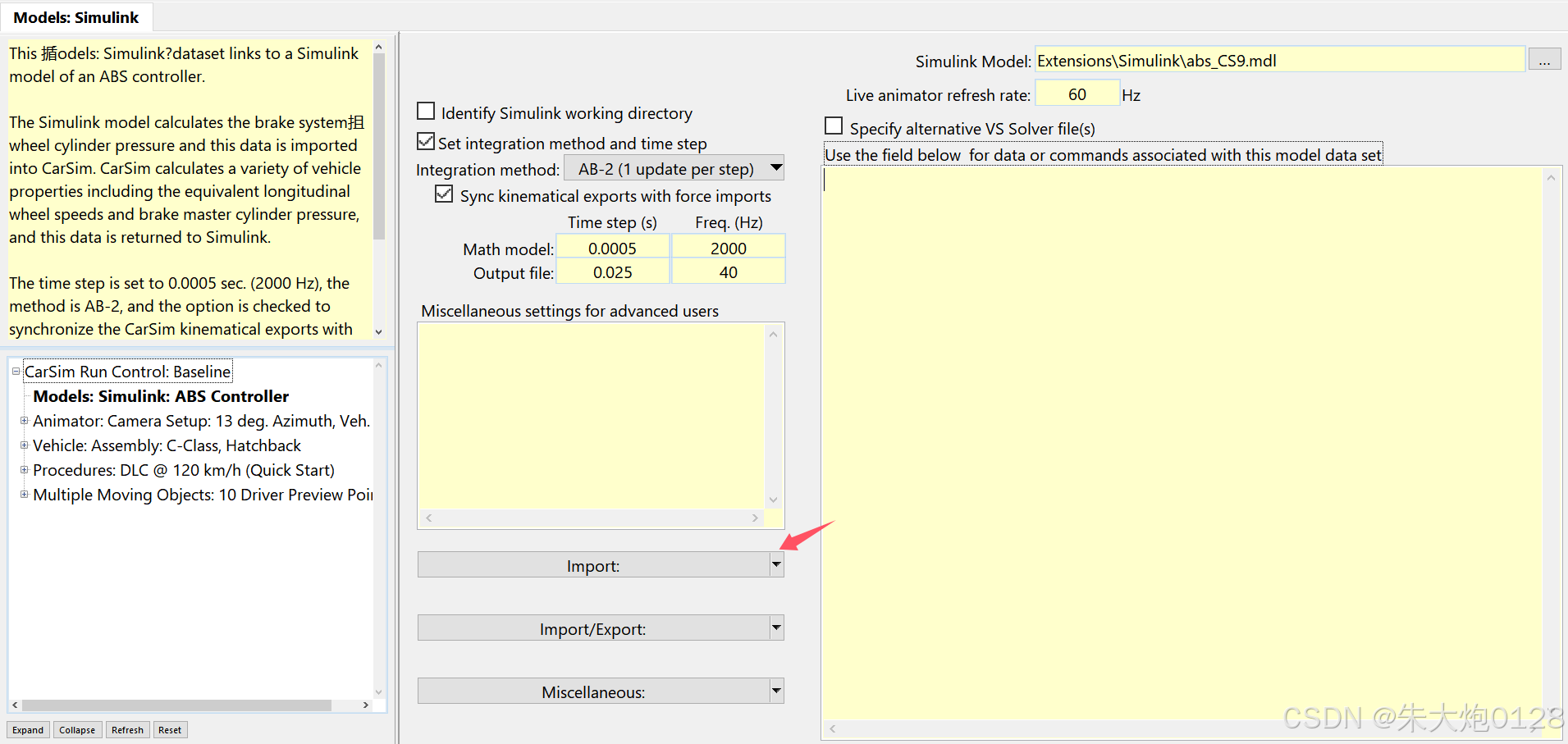
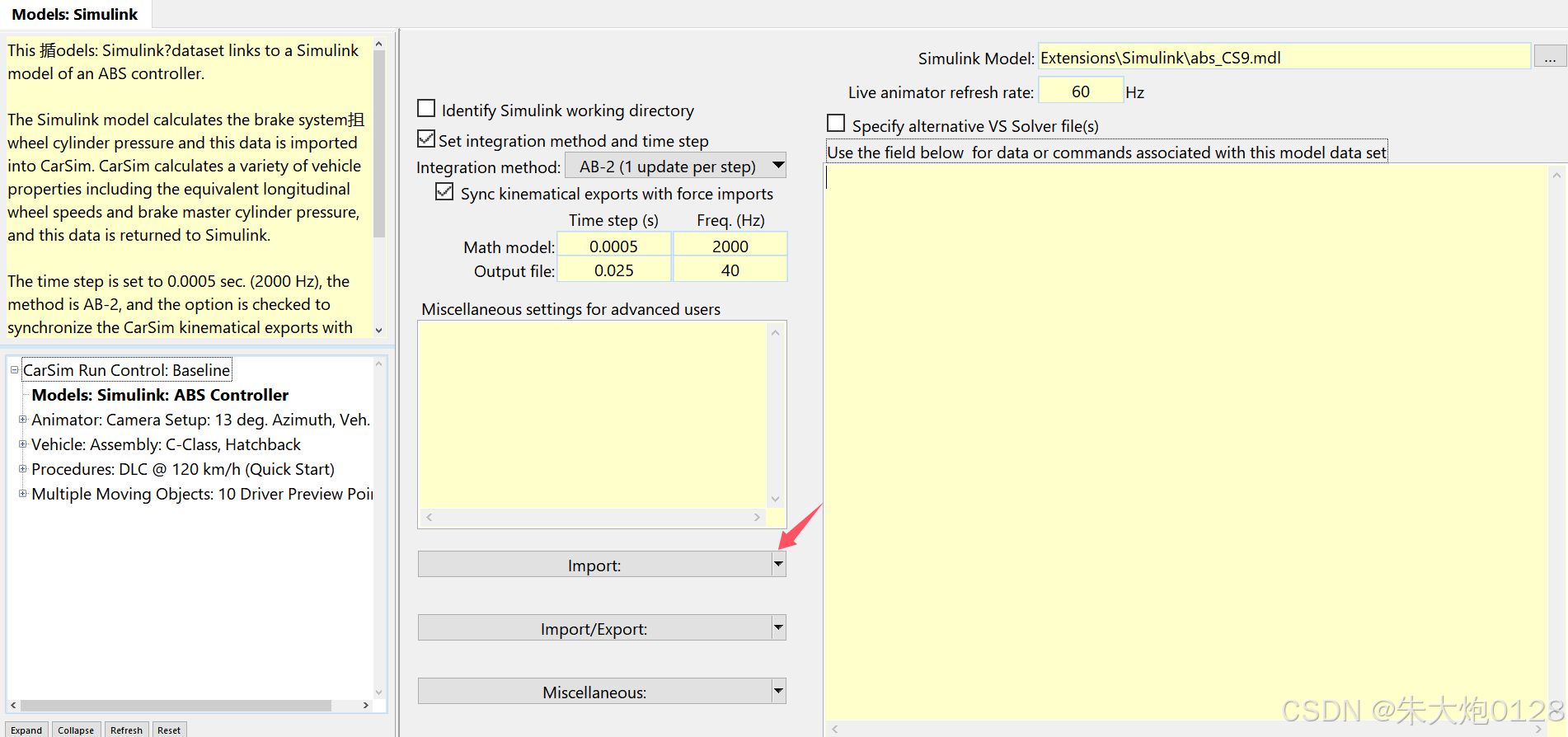
点击红色箭头的位置,查看这个datasets需要什么东西。
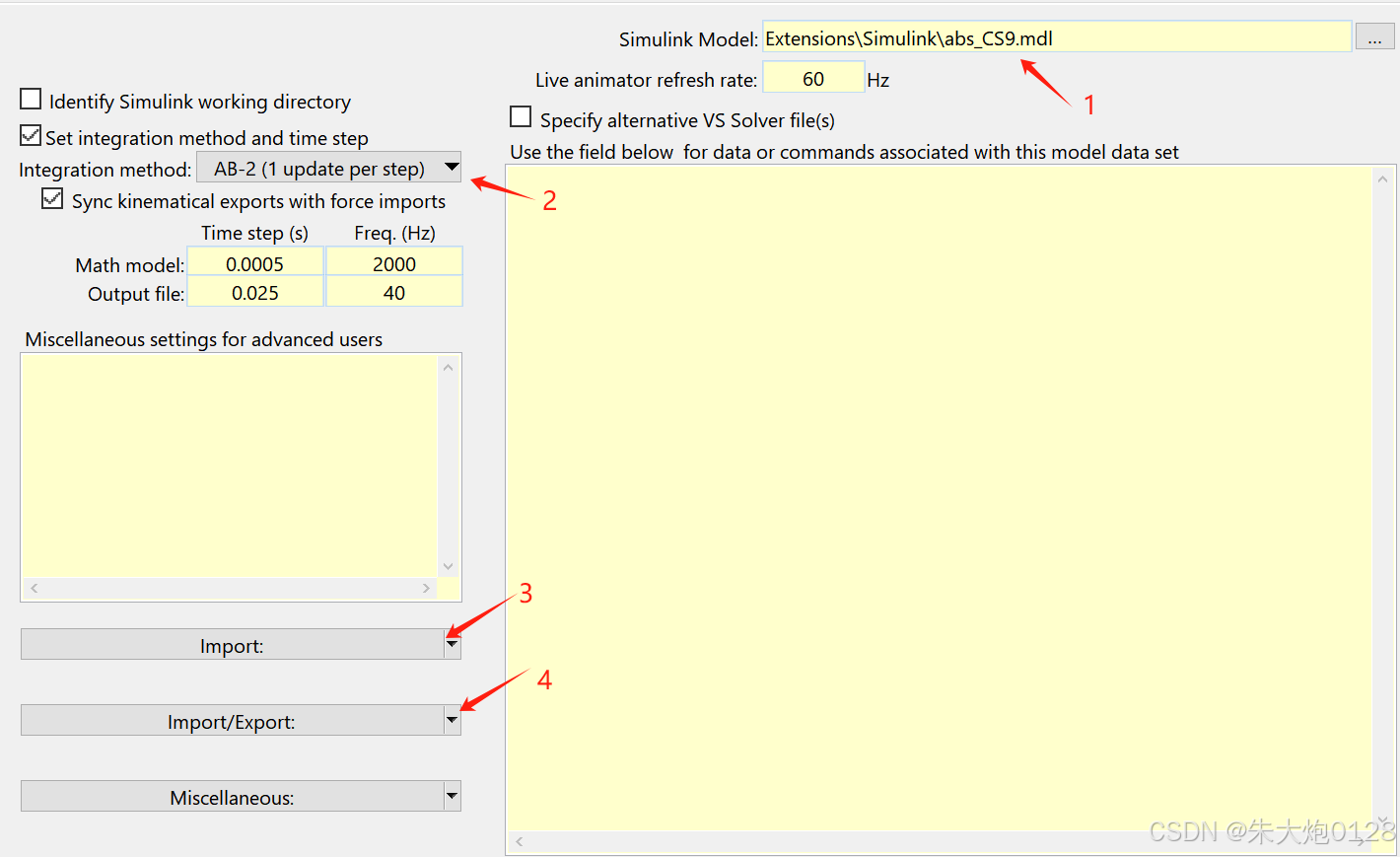
箭头1是选择Simulink的模型文件,下面是仿真运行的频率。箭头2是计算的方法,一般是AM-2.箭头3是Simulink输入进来的data,Export是Carsim输出的data。data交换的通道是Carsim计算->Simulink->Simulink计算->Carsim->Carsim计算。这一个循环。
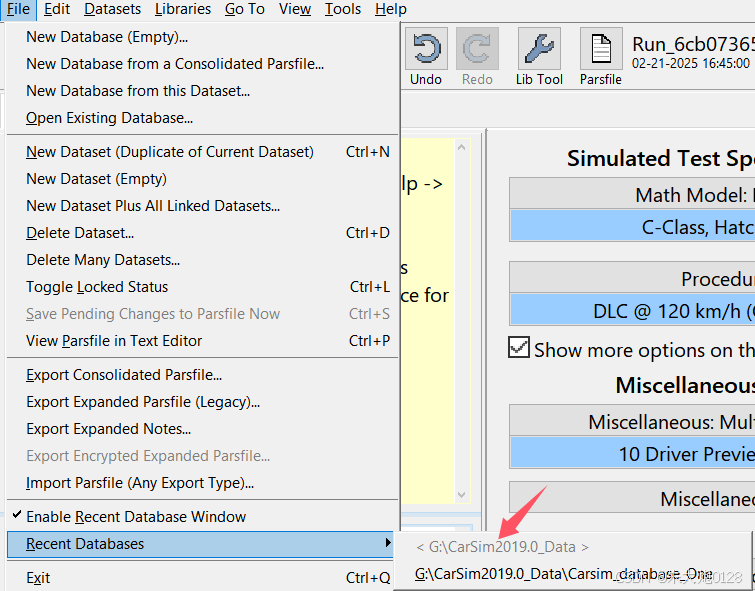
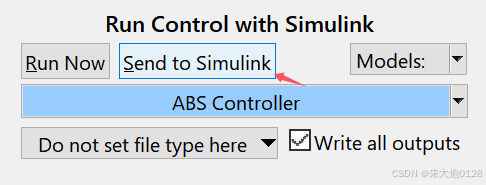
随便找个例子启动一下simulink。注意:如果你没有这个,就去选图2的箭头位置那一个。
点击Send to Simlunk,多等一会,可能比较久。
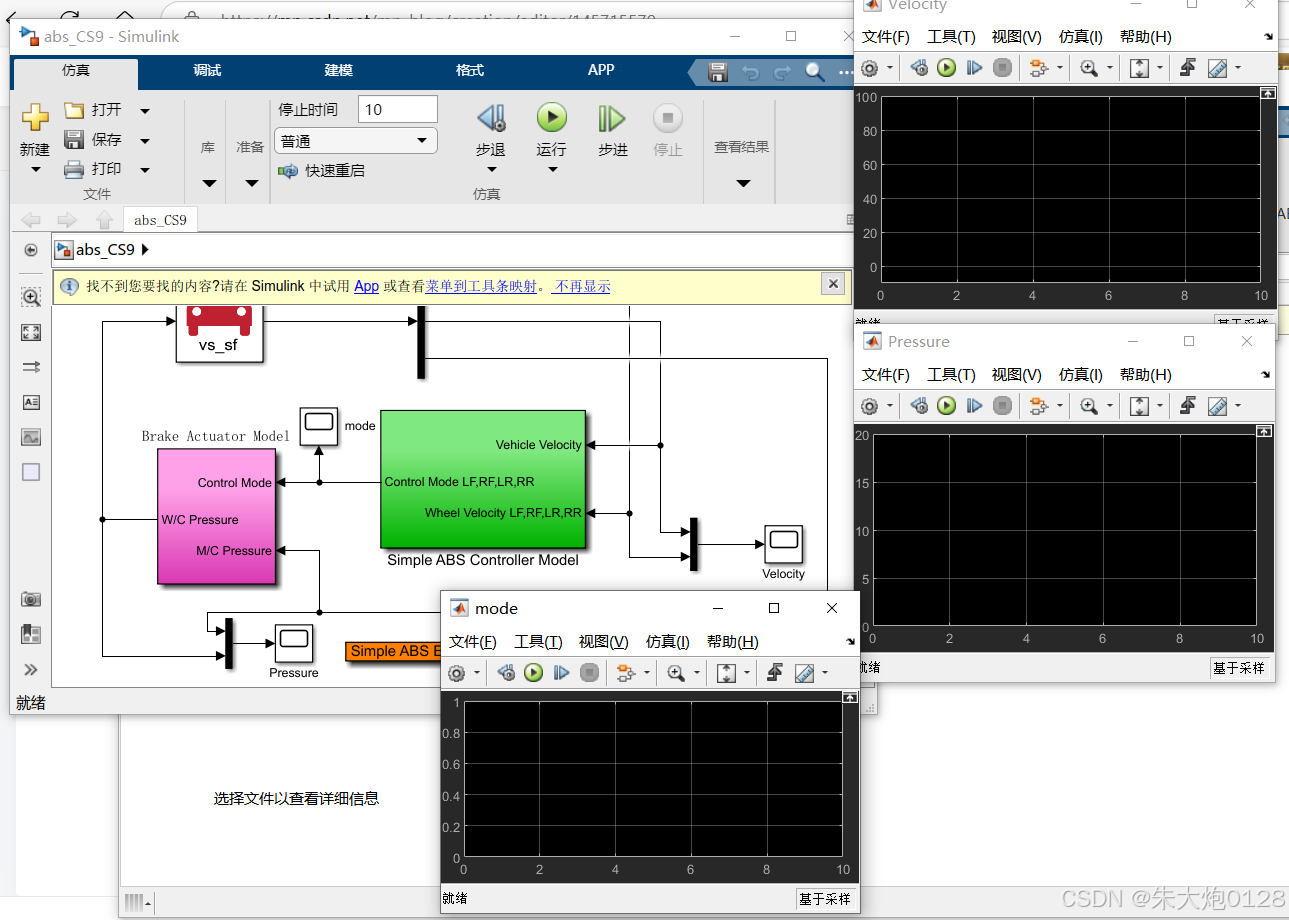
红色箭头指向的线就是Carsim的输出:
对应Carsim软件里面的:
下面这一根是Carsim的输入
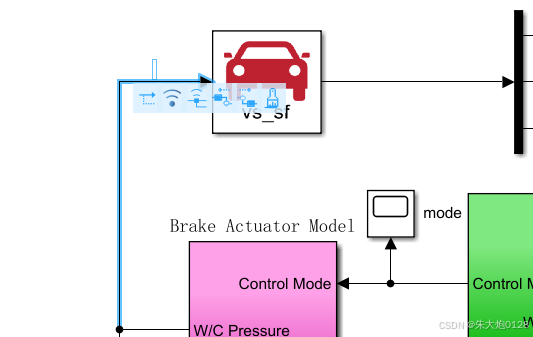
对应Carsim软件里面的:
查看一下配置参数:
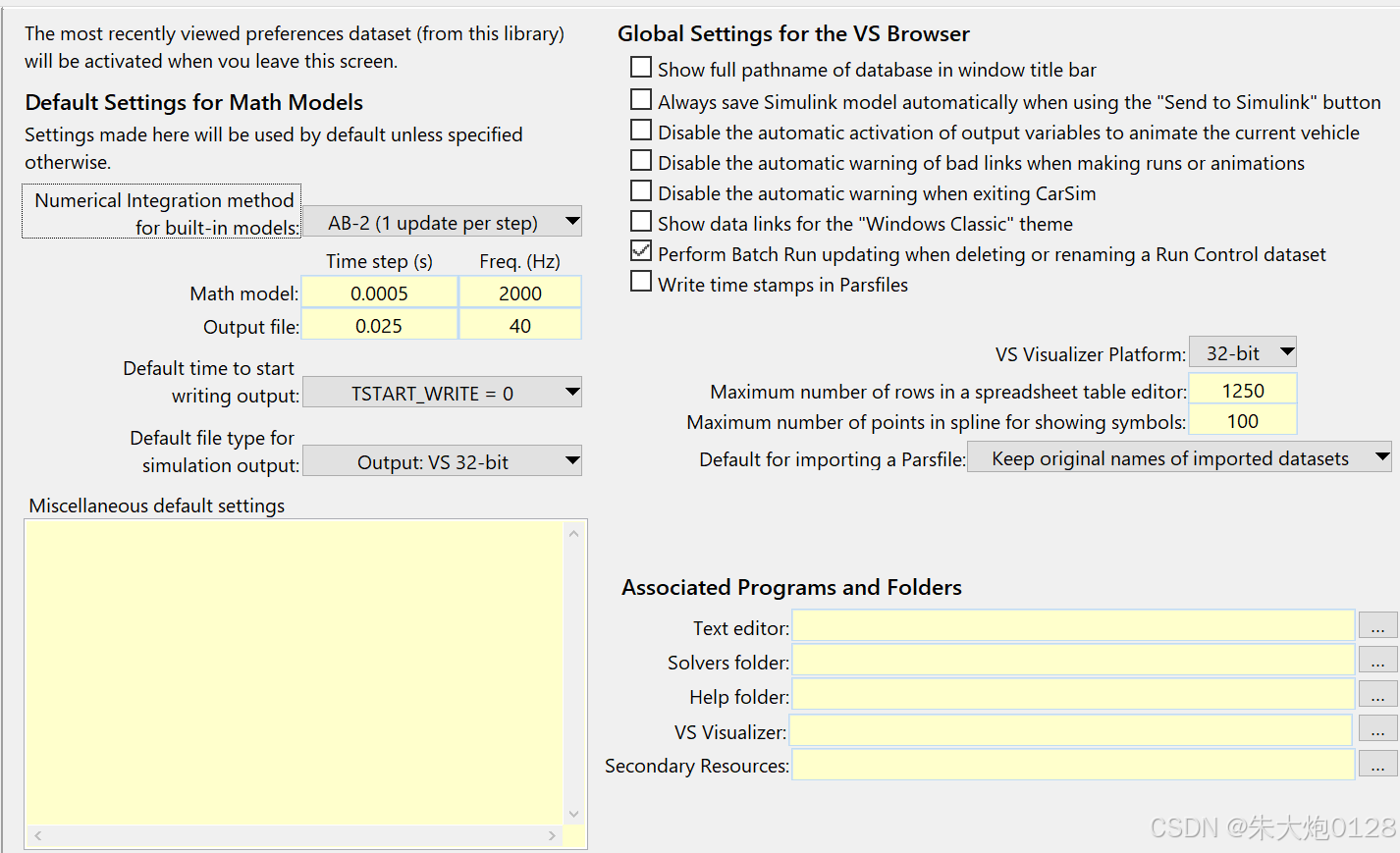
这个是关于积分微分方程计算的配置。一般用的是AM-2(好像叫龙库塔库法)。

这个是设置你准备在什么时候写入输出信息。TSTART_WRITE=0代表的是从仿真时间=0的时候开始。
b站的课程就到此结束了,因为我发现进度太慢了,我在网上买了进阶一点的课,遇到不会的基础再去学,这样会快一点。 不过我也会继续在这里更新,直到我写完为止。

















 1120
1120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









