






1. pangolin0.5下载界面
https://github.com/stevenlovegrove/Pangolin/releases/tag/v0.5
#安装
cd Pangolin
mkdir build
cd build
cmake ..
build
sudo make install
#测试
cd examples/HelloPangolin
mkdir build
cd build
cmake ..
build
./HelloPangolin
出现下这个图表示安装成功
2. 更改cmakelists的c++标准

以上为 . /build.sh 编译错误
未改之前
#Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
改为
set(CMAKE_CXX_STANDARD 14)
#Check C++11 or C++0x support
#include(CheckCXXCompilerFlag)
#CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
#CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
#if(COMPILER_SUPPORTS_CXX11)
# set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
# add_definitions(-DCOMPILEDWITHC11)
# message(STATUS "Using flag -std=c++11.")
#elseif(COMPILER_SUPPORTS_CXX0X)
# set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
# add_definitions(-DCOMPILEDWITHC0X)
# message(STATUS "Using flag -std=c++0x.")
#else()
# message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please #use a different C++ compiler.")
#endif()
3.出现std::chrono::monotonic_clock’ has not been declared问题
需要改的文件有:example每个里面的.cc文件
改的部分:
/********************************未修改**************************************
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#else
// std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
// Pass the image to the SLAM system
SLAM.TrackMonocular(im,tframe);
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
// std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
***********************************修改后********************************************/
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
// Pass the image to the SLAM system
SLAM.TrackMonocular(im,tframe);
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
//****************************************************************************************
4.出现ORB_SLAM2/src/System.cc: error: ‘usleep’ was not declared in this scope usleep(5000);
(1)找到对应的System.cc文件的首部加入头文件
#include<unistd.h>
一般需要增加unistd.h的文件还有:
Examples/Monocular/mono_euroc.cc
Examples/Monocular/mono_kitti.cc
Examples/Monocular/mono_tum.cc
Examples/RGB-D/rgbd_tum.cc
Examples/Stereo/stereo_euroc.cc
Examples/Stereo/stereo_kitti.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/System.cc
src/Tracking.cc
src/Viewer.cc
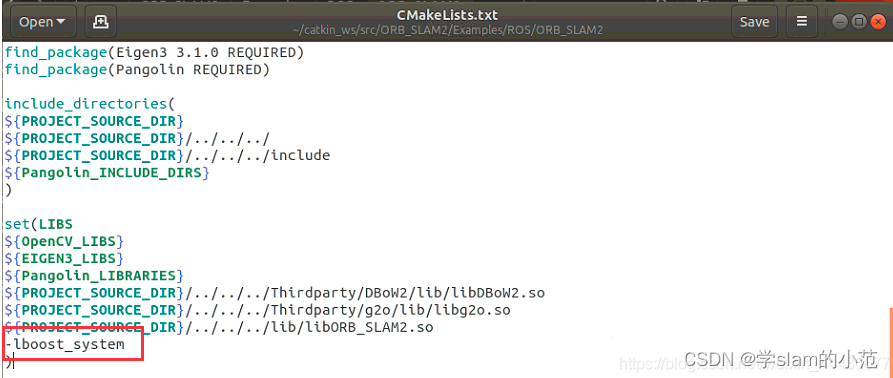
(2)出现CMakeFiles/RGBD.dir/build.make:197: recipe for target ‘…/RGBD’ failed错误
修改home/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/文件夹下的CMakeLists.txt文件。
在set(LIBS xxxxx 的后面加上下列这一句代码。
-lboost_system














 317
317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









