






一、ABB仿真介绍
目标:(1)制作仿真工作站(2)辅助实操练习(3)提高编程效率(4)创意设计
1.1 制作仿真工作站
(1)焊接、喷涂机器人(走精确轨迹)
(2)码垛机器人(只需确定抓取和放置点、考虑码垛摆放)
(3)并联型分拣机器人(输送链跟踪、视觉)
(4)机床上下料
(5)导轨变位机
(6)多机协同
1.2 辅助实操练习
现场编程:使用示教器
离线编程:虚拟示教器 编好程序导入机器人
1.3 提高编程效率
基于C#语言编程 和机器人连接 可以直接改写机器人程序1.
1.4 其他创意设计
二、仿真学习
smart组件 喷涂工件配置(清晰)_哔哩哔哩_bilibilismart组件 喷涂工件配置(清晰)是ABBrobot studio仿真软件 工业机器人,smart组件,喷涂工作站的制作的第2集视频,该合集共计5集,视频收藏或关注UP主,及时了解更多相关视频内容。![]() https://www.bilibili.com/video/BV1a34y1x7xQ/?spm_id_from=333.788.videopod.episodes&vd_source=6ab0ec630b78ba699e207013d8fc5f86&p=2以上两个视频,第二个讲解比较快,我是跟着第二个做的仿真,第一个讲的比较慢,有不懂的细节可以对应地去看。
https://www.bilibili.com/video/BV1a34y1x7xQ/?spm_id_from=333.788.videopod.episodes&vd_source=6ab0ec630b78ba699e207013d8fc5f86&p=2以上两个视频,第二个讲解比较快,我是跟着第二个做的仿真,第一个讲的比较慢,有不懂的细节可以对应地去看。
三、仿真程序
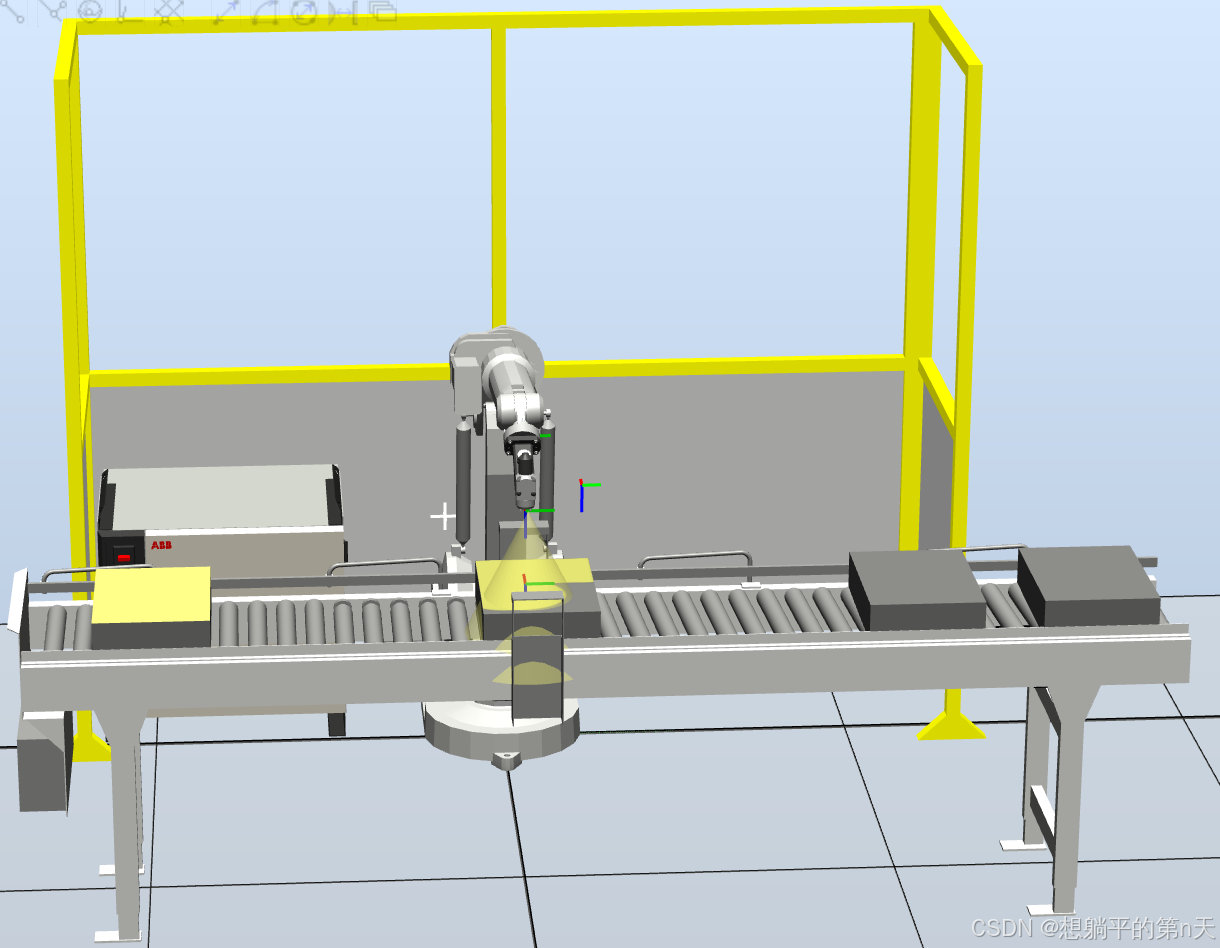
完整的仿真程序见百度网盘,本文搭建了一个喷涂机器人,可实现传感器检测工件到位,喷涂轨迹规划功能。
通过网盘分享的文件:Solution4.zip
链接: https://pan.baidu.com/s/1_gBWlWgINoFgVT4MiECz3w?pwd=p78k 提取码: p78k
--来自百度网盘超级会员v3的分享
注意:使用仿真软件打开此文件夹时需要解包操作,不然工作站无法运行;在将自己搭建的工作站分享给他人时需要打包操作,不能直接压缩文件夹发送,打包解包操作可以参考以下网站

















 1440
1440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









