







1.对象的关系

模型导入
stp格式:
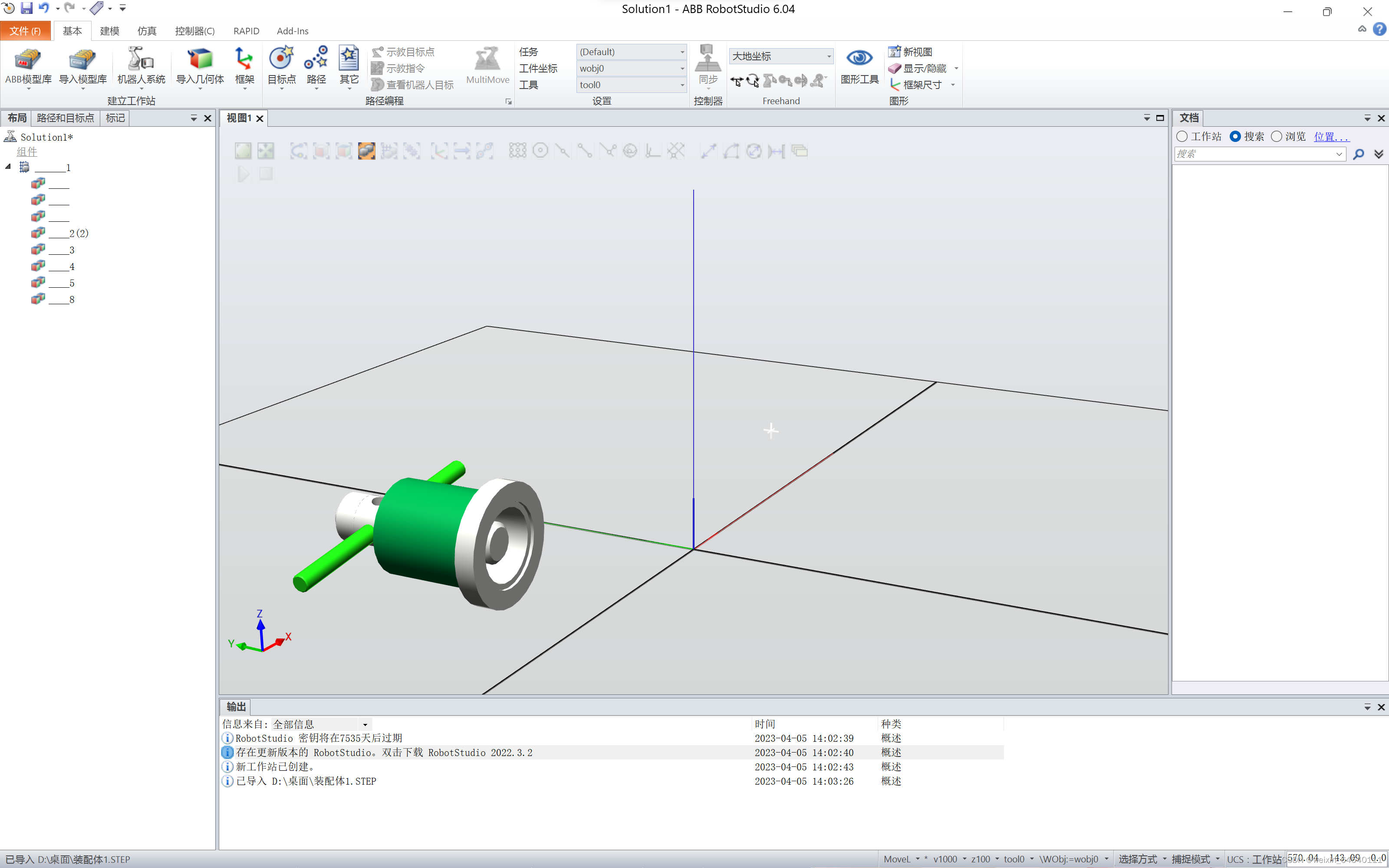
直接拖就行
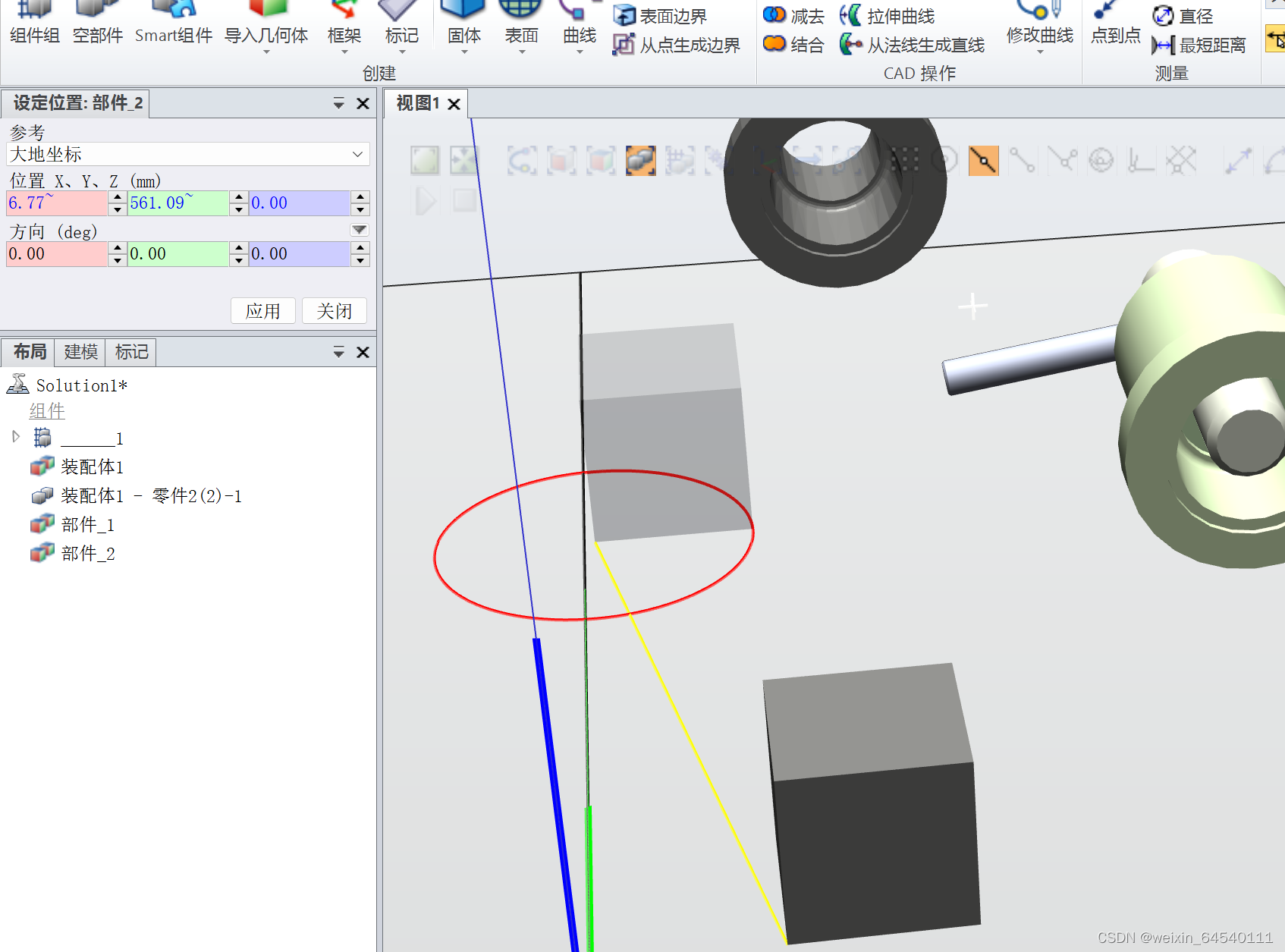
问:我单独想把一个物体拿出来那怎么弄?
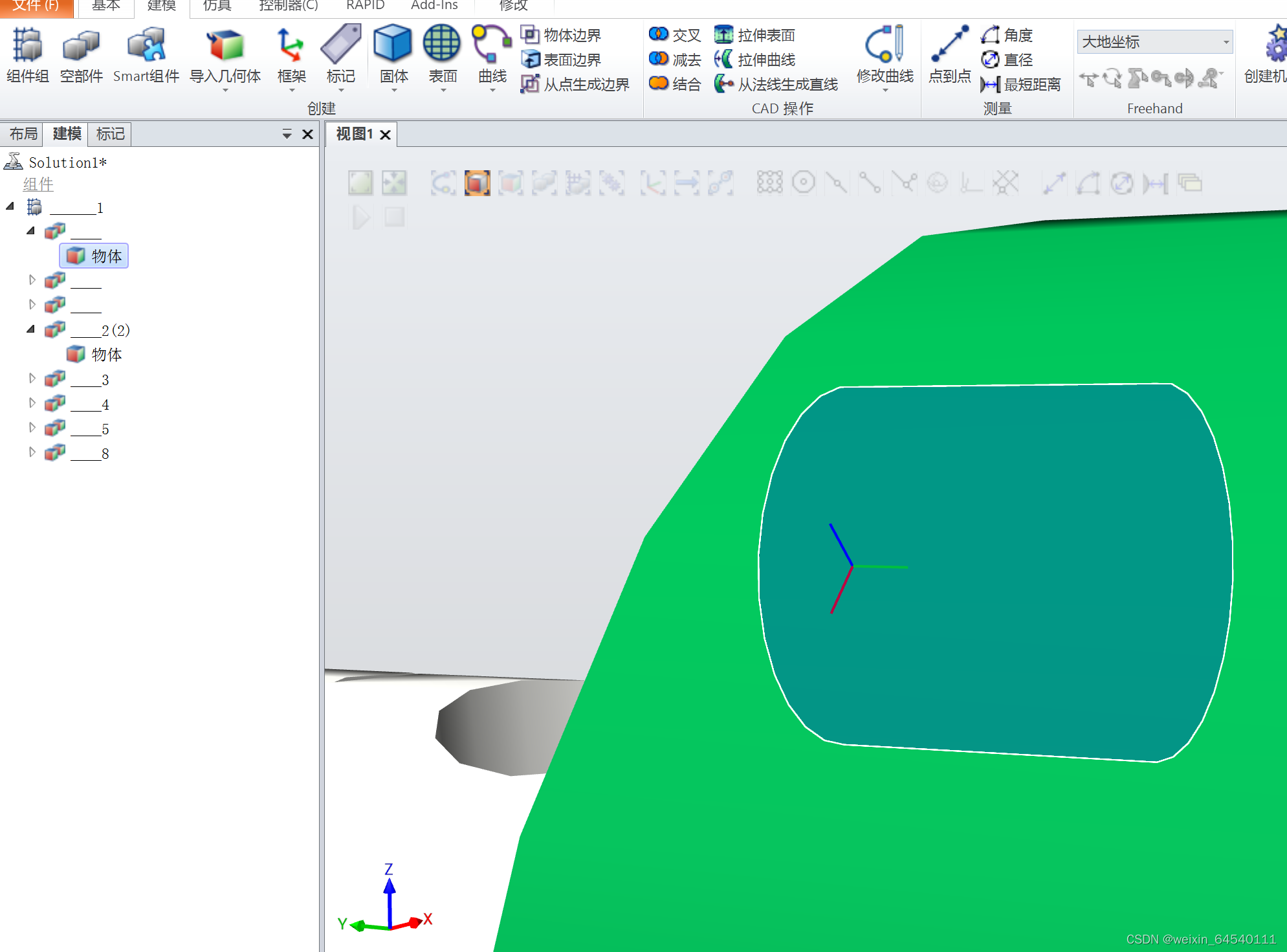
新建一个空部件

选择我们要移动的物体
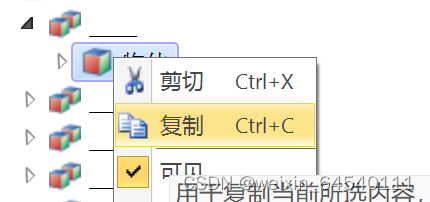
复制他
然后粘贴在我们新建的部件上
是否重新

选中它,移动成功。
当然我们也可以用剪切命令
sat文件:
直接拖入即可
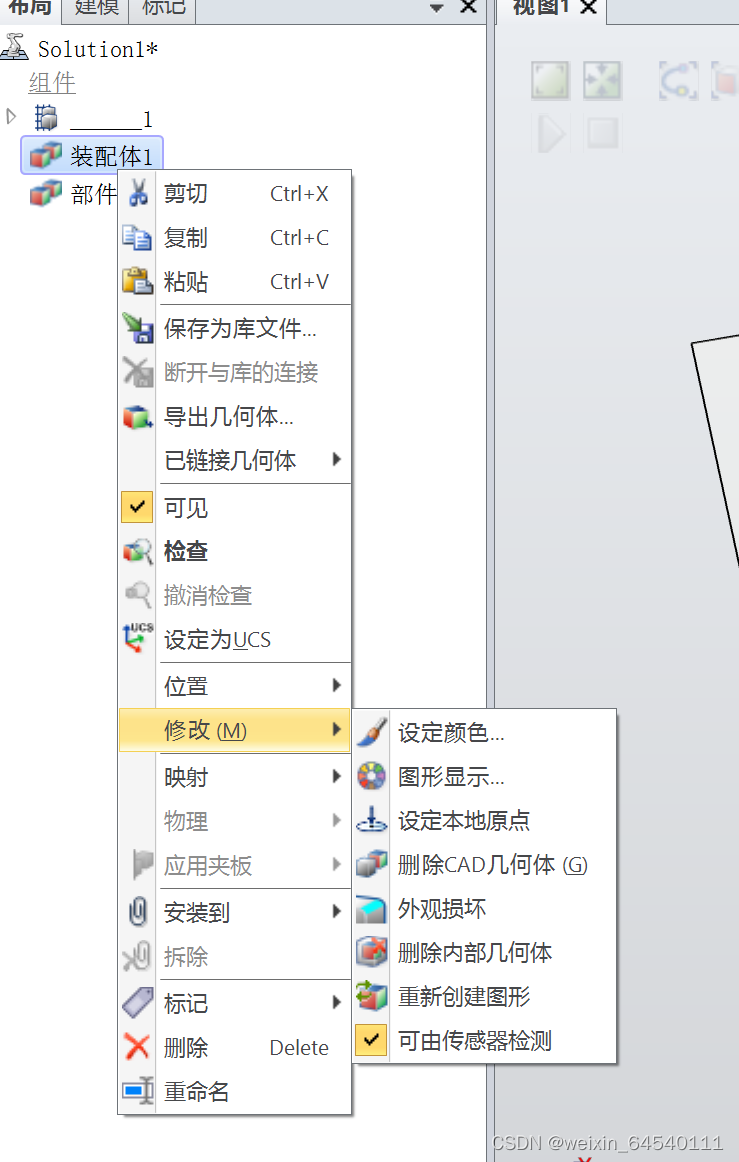
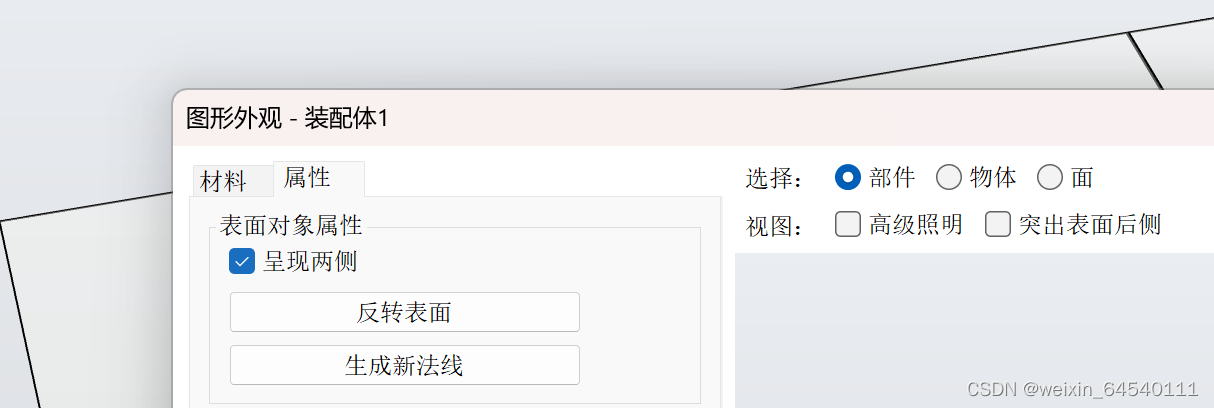
有时候我们拖入后部件可能会受损,依次我们要点击修复,显示两侧
stl文件:
直接拖入
比较阴间,stl文件拖入进来它不可以拉开,而其他
而且我们用中心捕捉,完全捕捉不了stl上面的点
3.大地坐标&本地坐标
大地坐标:就是软件里面的世界坐标
本地坐标:
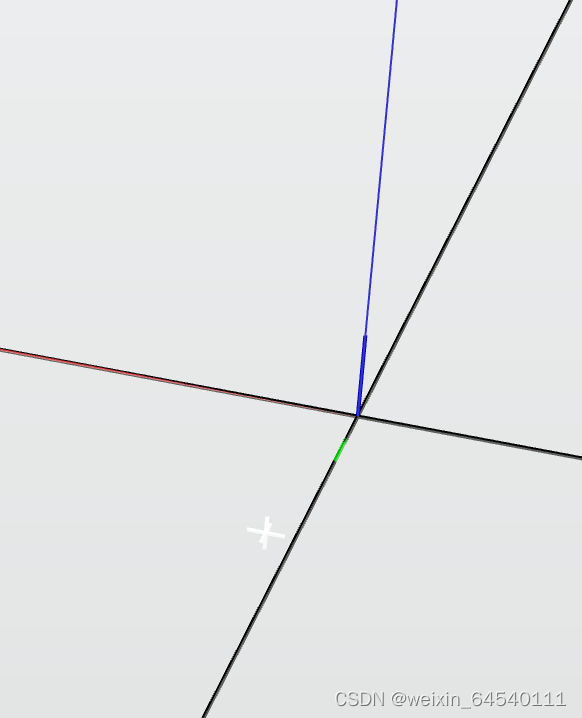
假设我们想把这个正方形移动到a点,移动到a点的情况有多少?
答:无数多个,因为正方形上有无数个点,就有无数种可能
我们怎么避免这种情况?我们可以在正方形上定义一个本地坐标,本地坐标与a点重合,那样情况就只有一种了
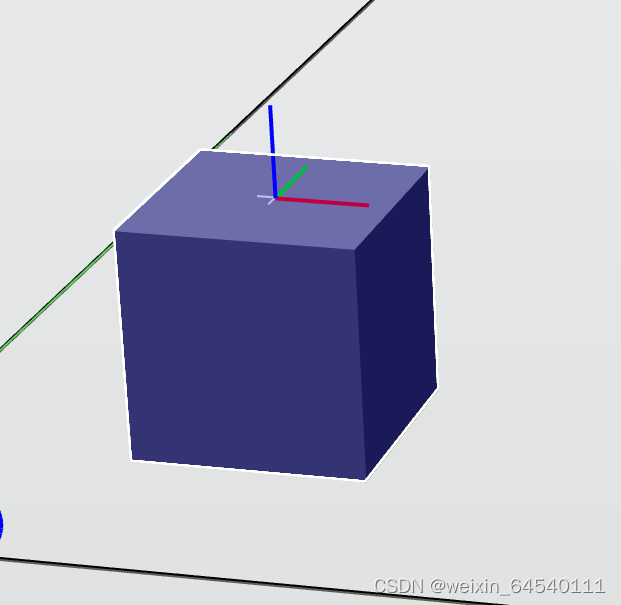
左下角有个本地坐标
在robotstudio中每个物体都有本地坐标,用来确定它在空间中的位置
本地坐标有什么用呢?
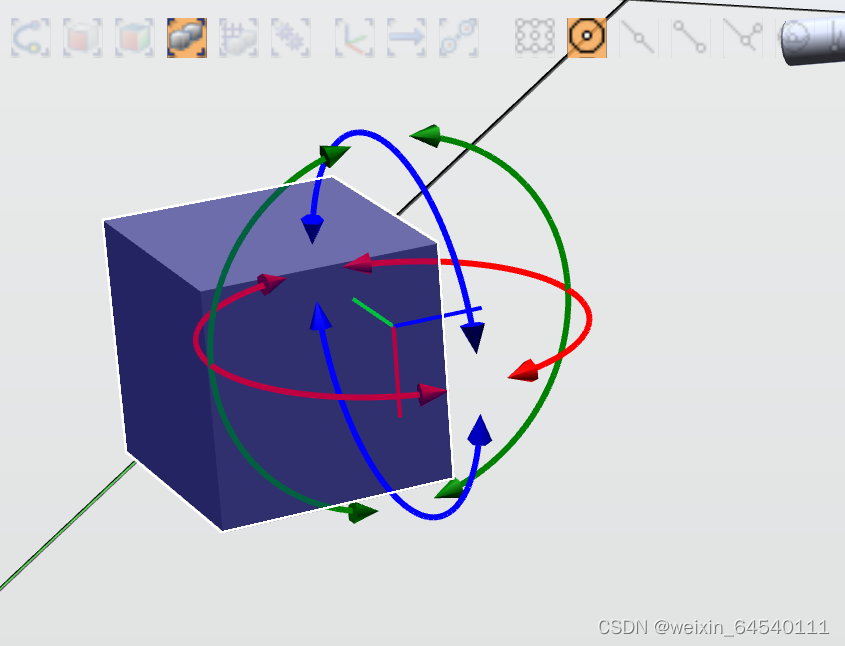
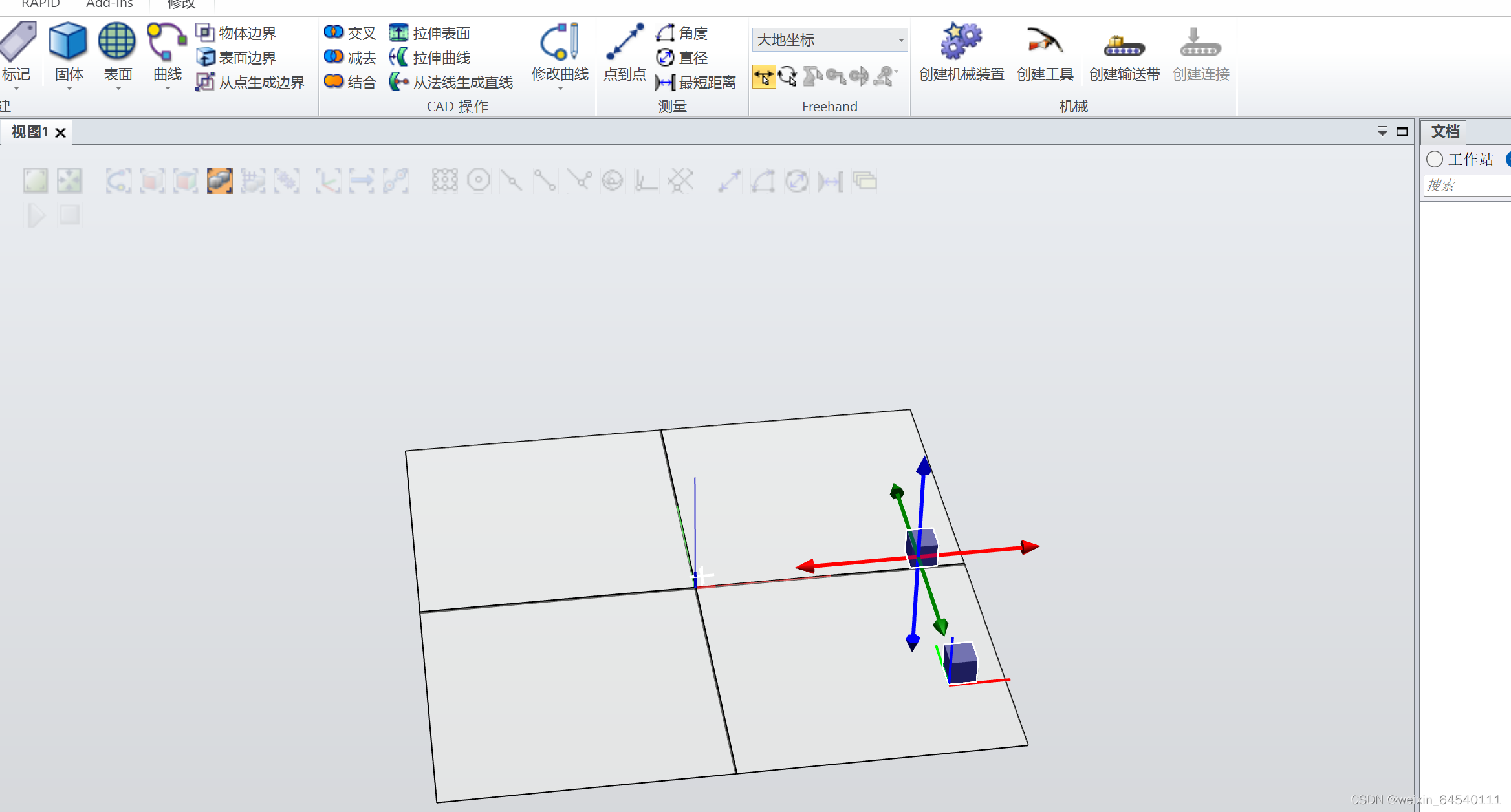
我们可以使用旋转命令试试看
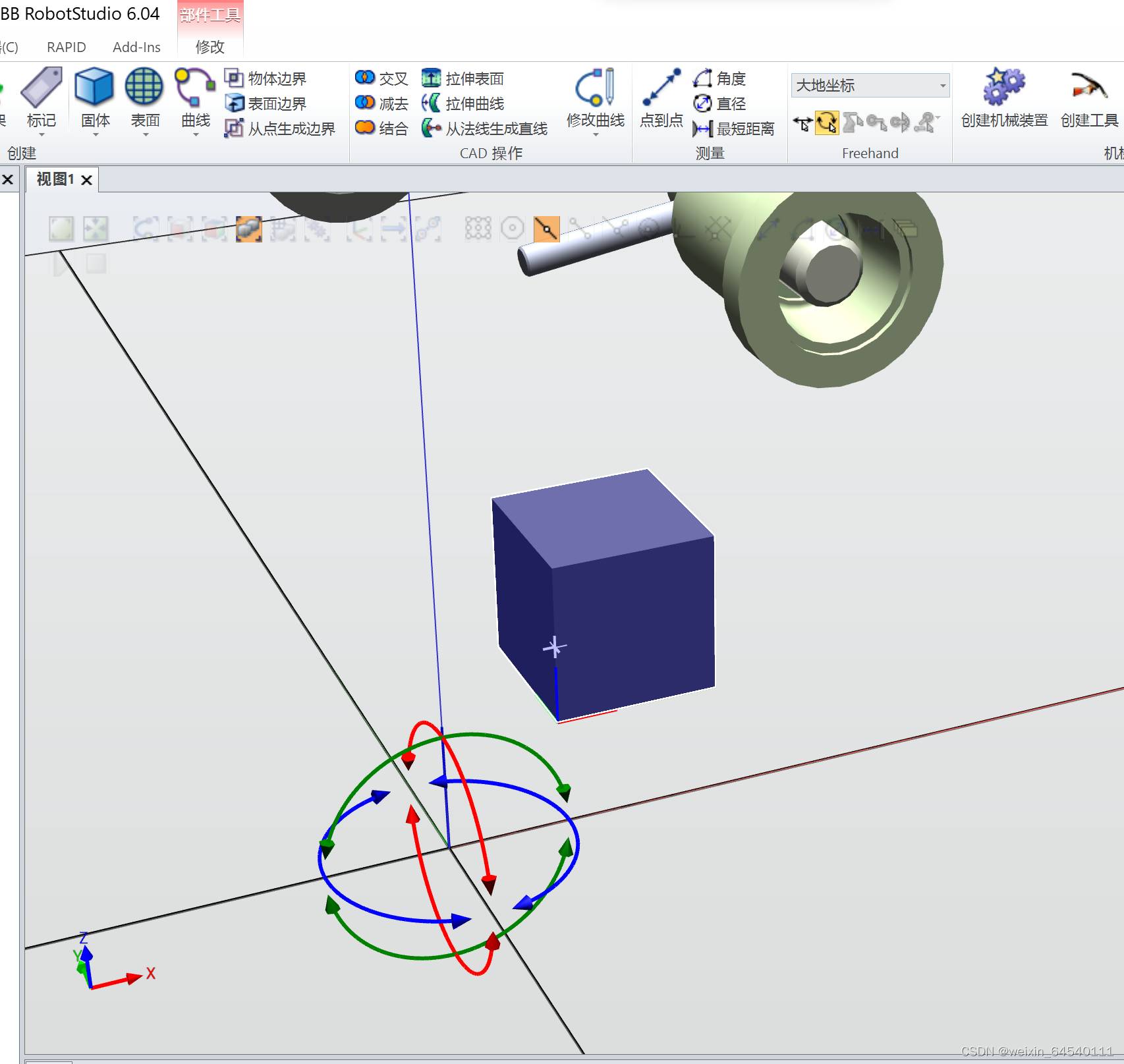
一般我们旋转式以大地原点进行旋转,那么我要以正方体中心旋转怎么搞呢?
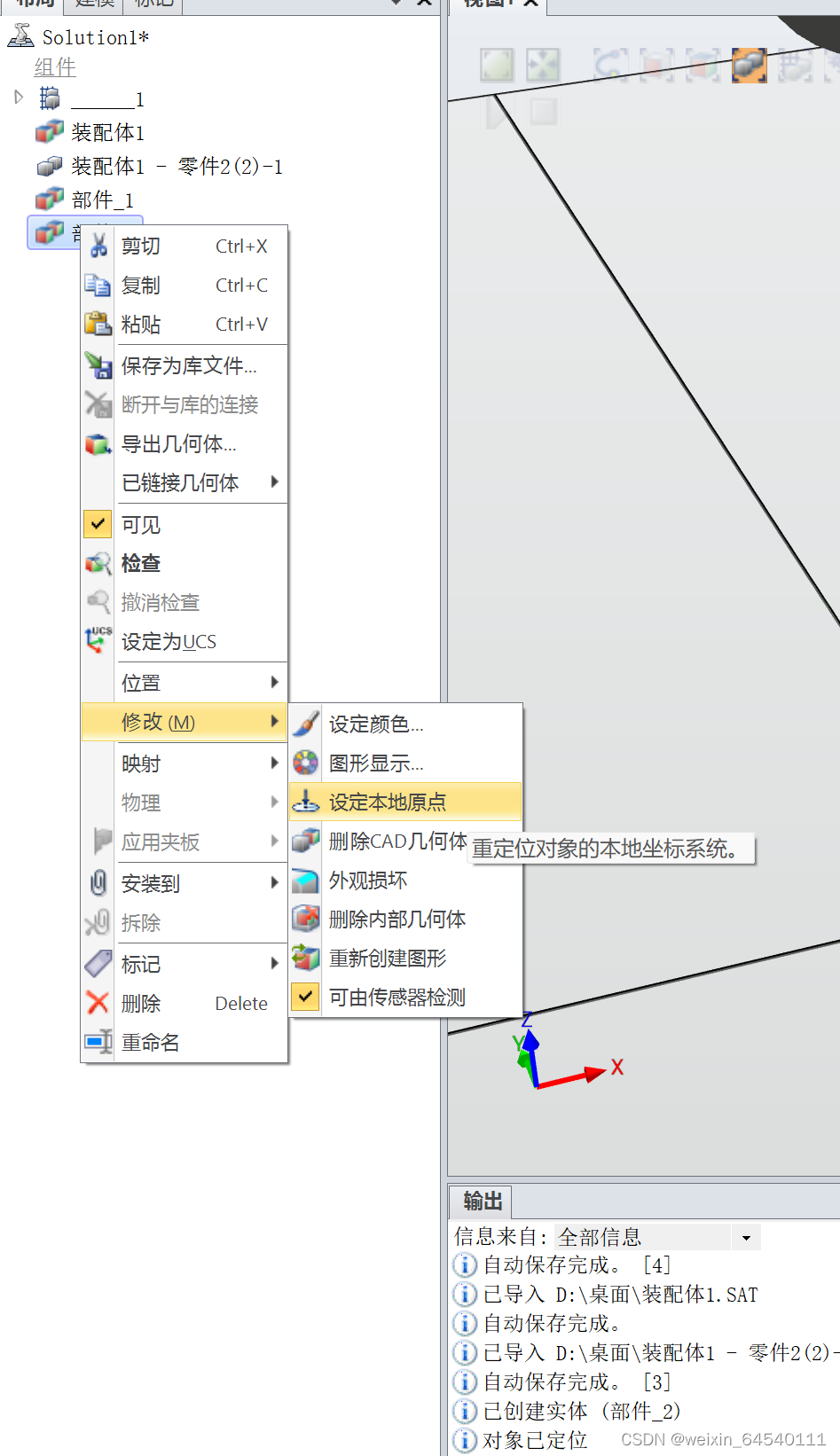
我们先设置本地原点为正方体中心

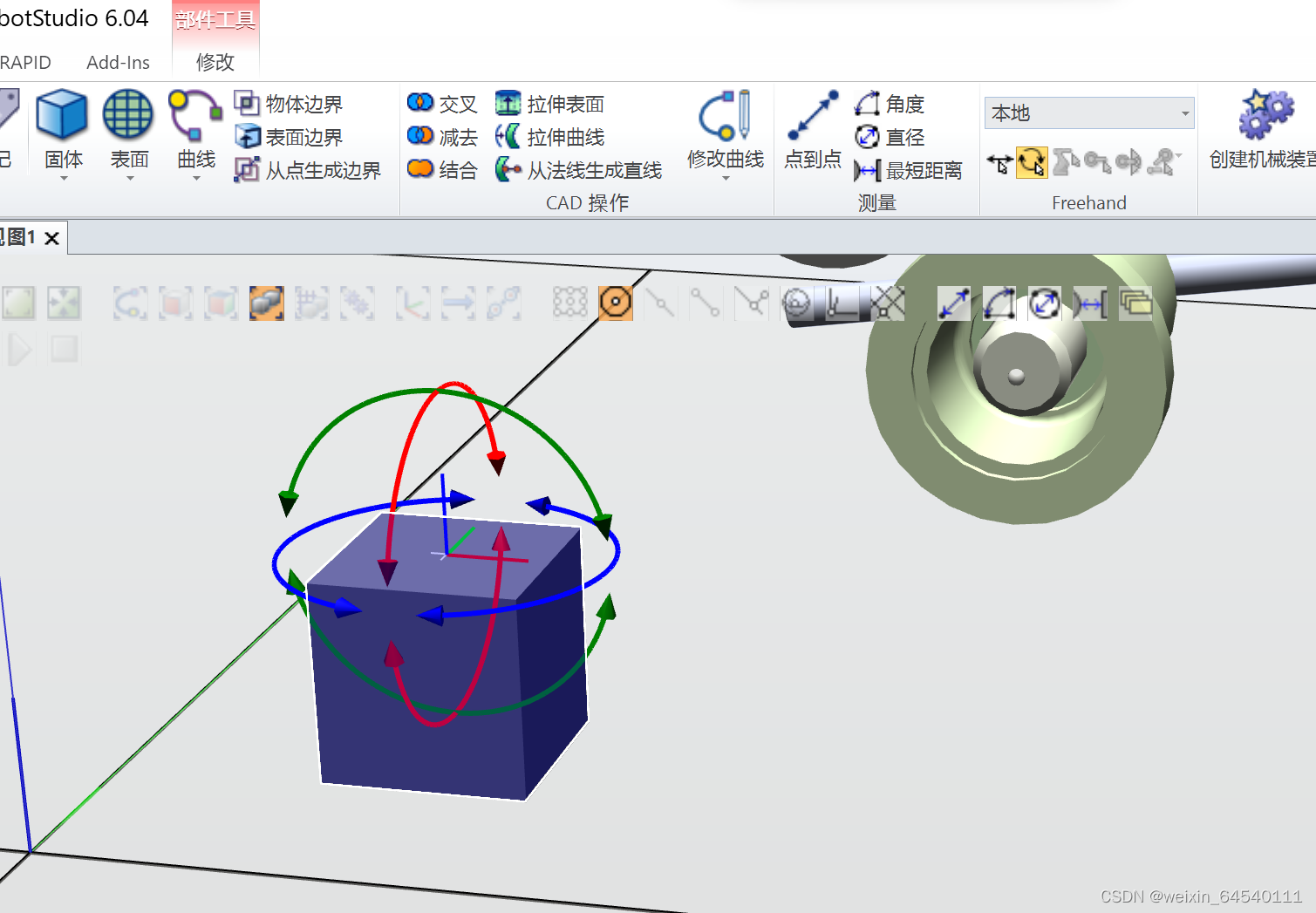
改成本地
然后就可以了啦
4.安装&拆除
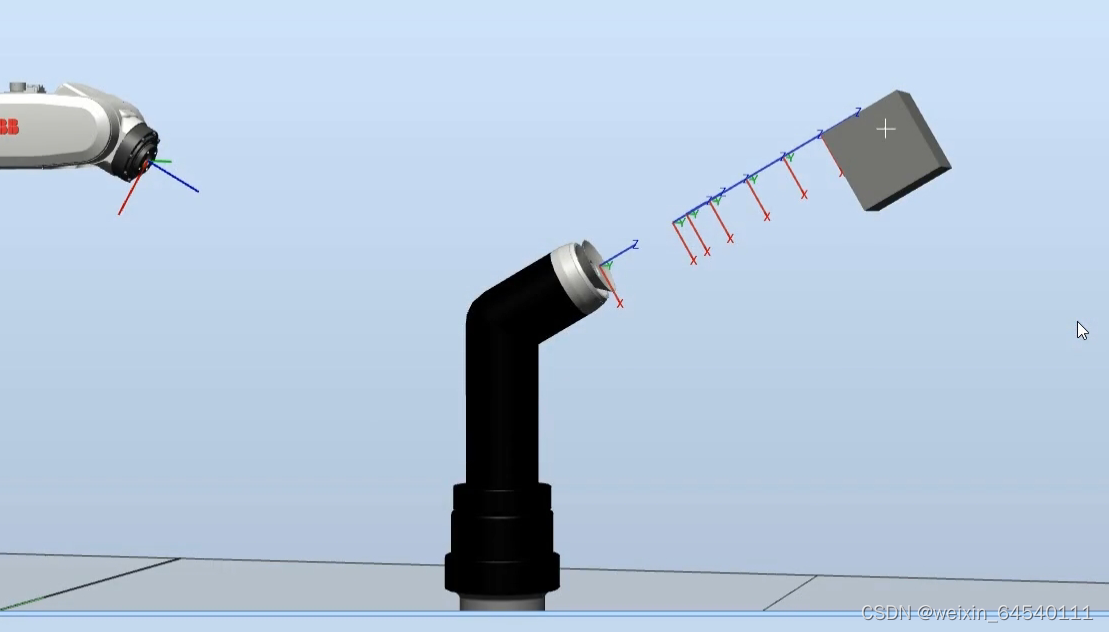
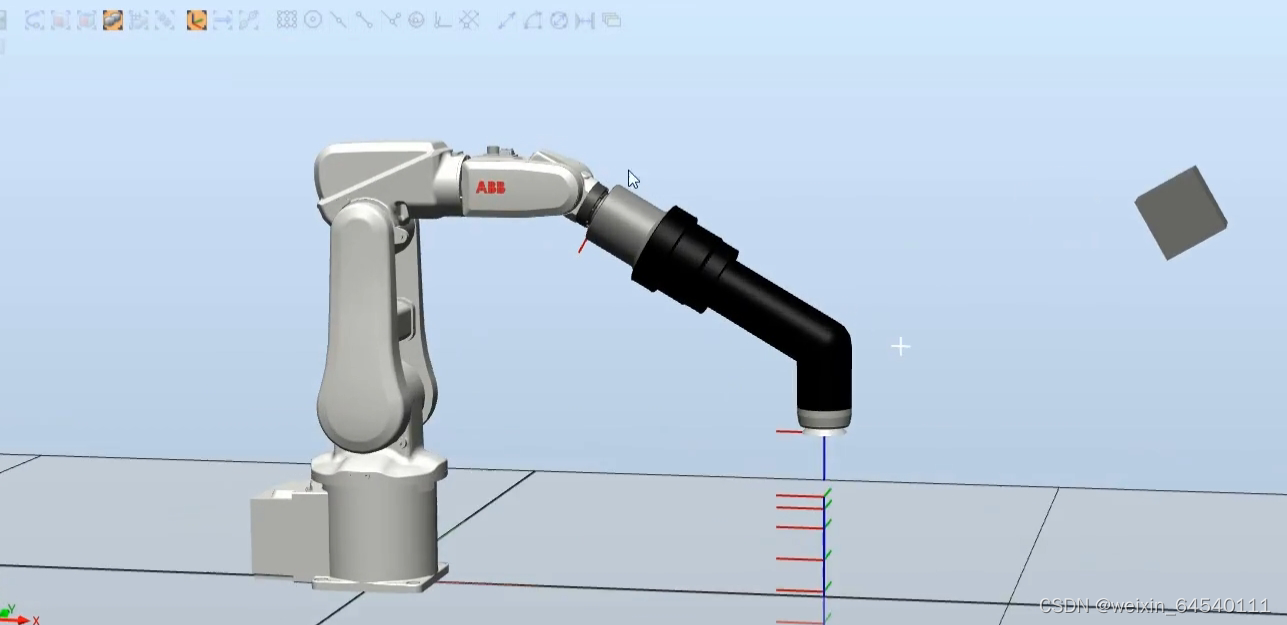
在我们仿真的时候,我们通常会仿真机器人夹取起一个物体到一个地方,在放下一个物体,夹取时物体跟机器人一起运动,放下物体是小正方体不跟随机器人一起运动,实际上就是安装和拆除。
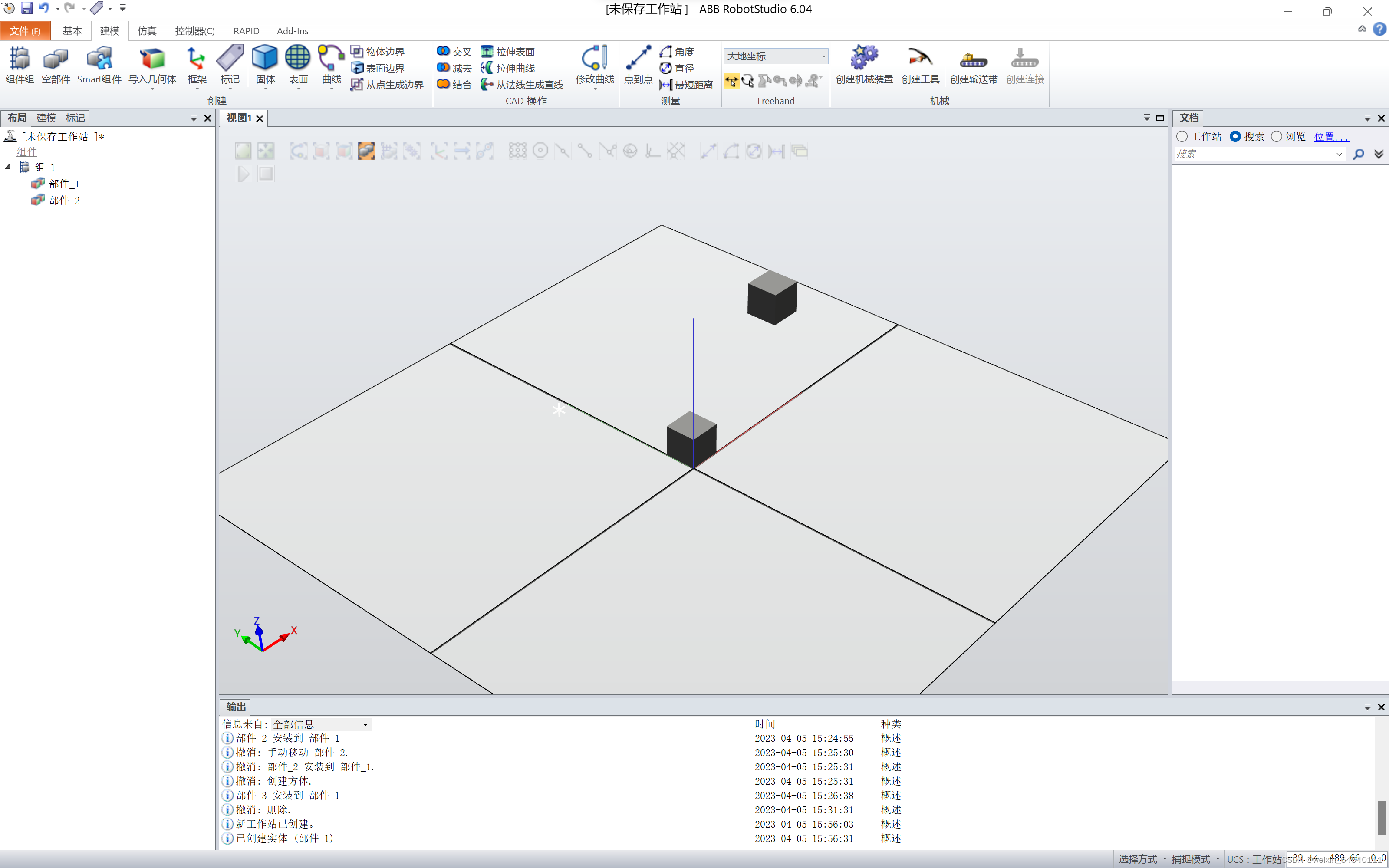
我们建两个小正方体
我们安装一下两个部件
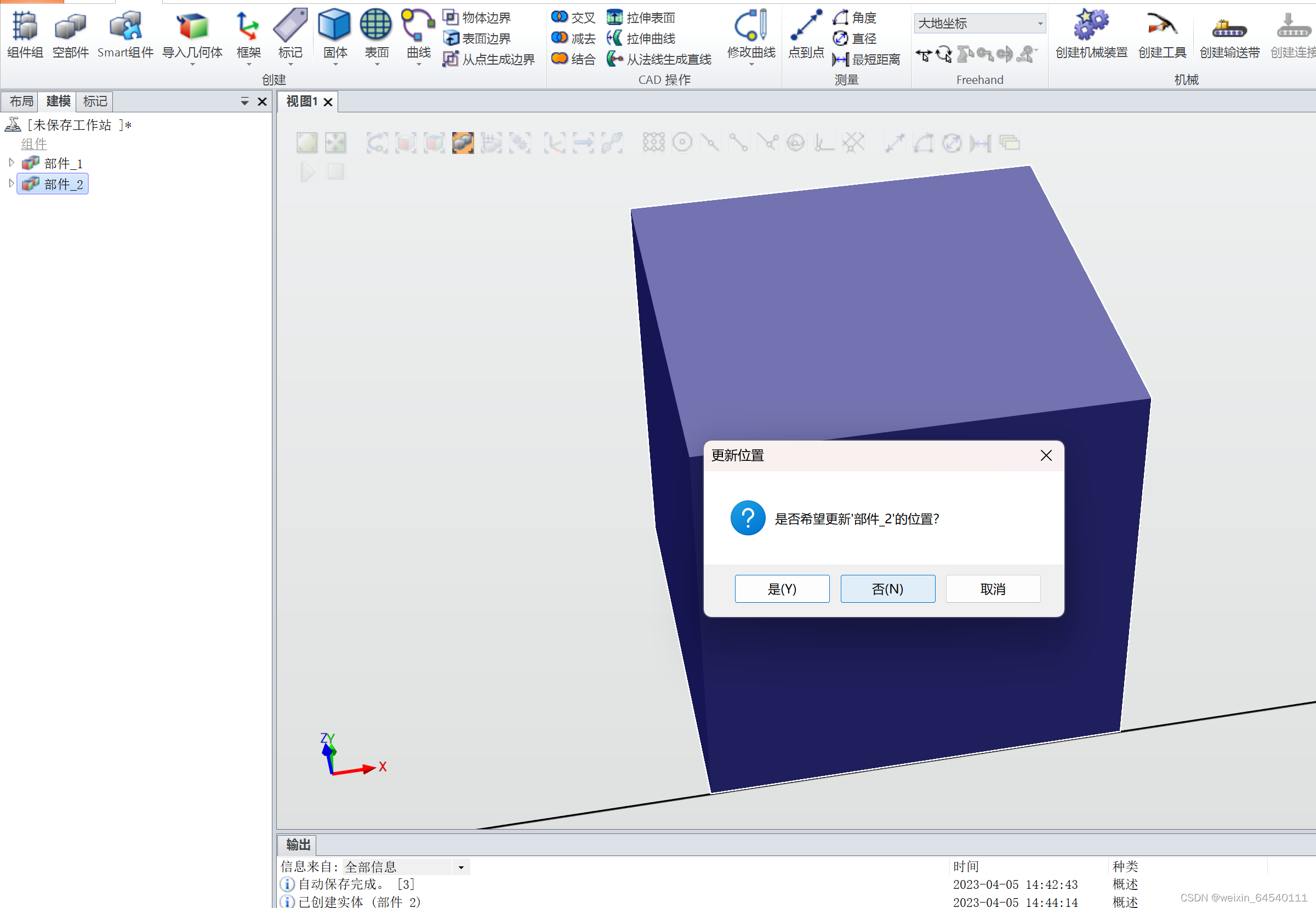
点击否
注意:
如果选择是的话,本地坐标就会重合
如果一个带本地坐标的部件安装到一个含tcp工具坐标,又有本地坐标的部件上(例如机器人?)
,那么就是我们要安装的东西的本地坐标来对齐机器人的工具坐标
eg:
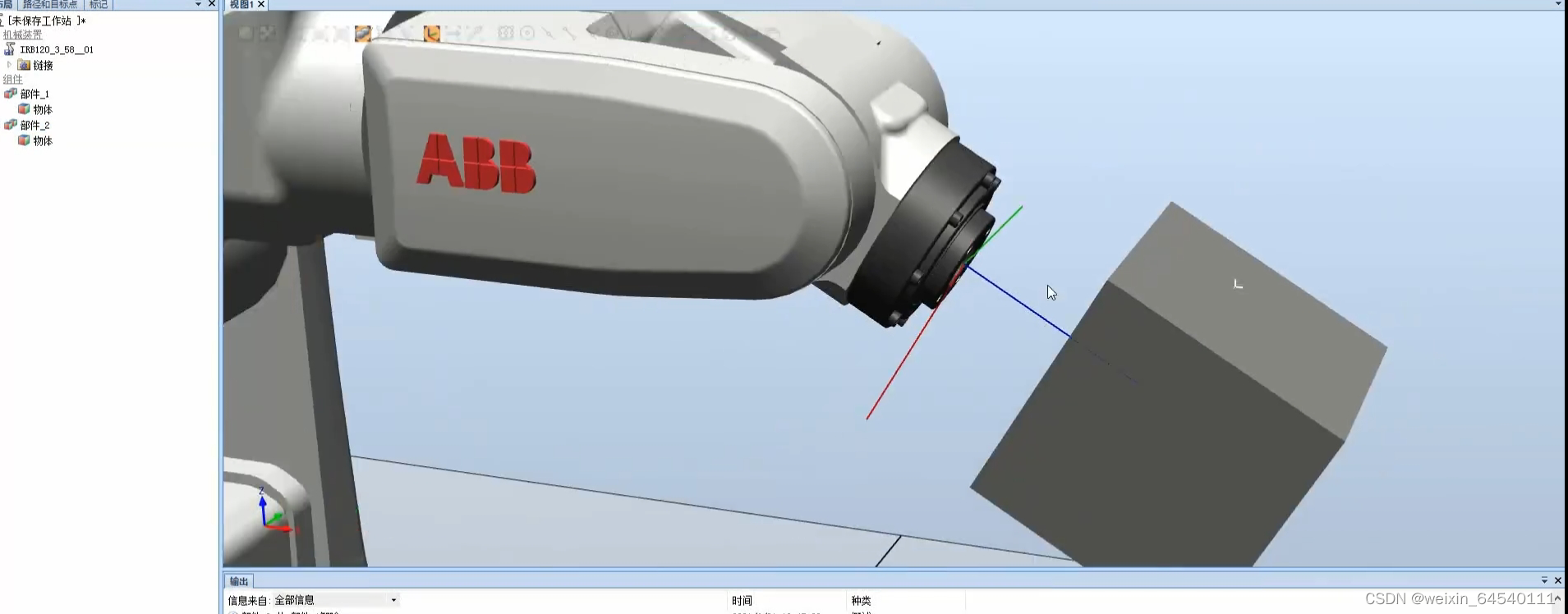
然后两个都是有tcp工具坐标和本地坐标的东西安装,那么就是要安装部件的本地坐标对齐被安装部件的工具坐标上面
5.安装父对象父对象嵌套规则&移动规则
我们新建一个组
现在组1里面有两个子对象,部件与部件2有一个父对象,就是组1
关系图:
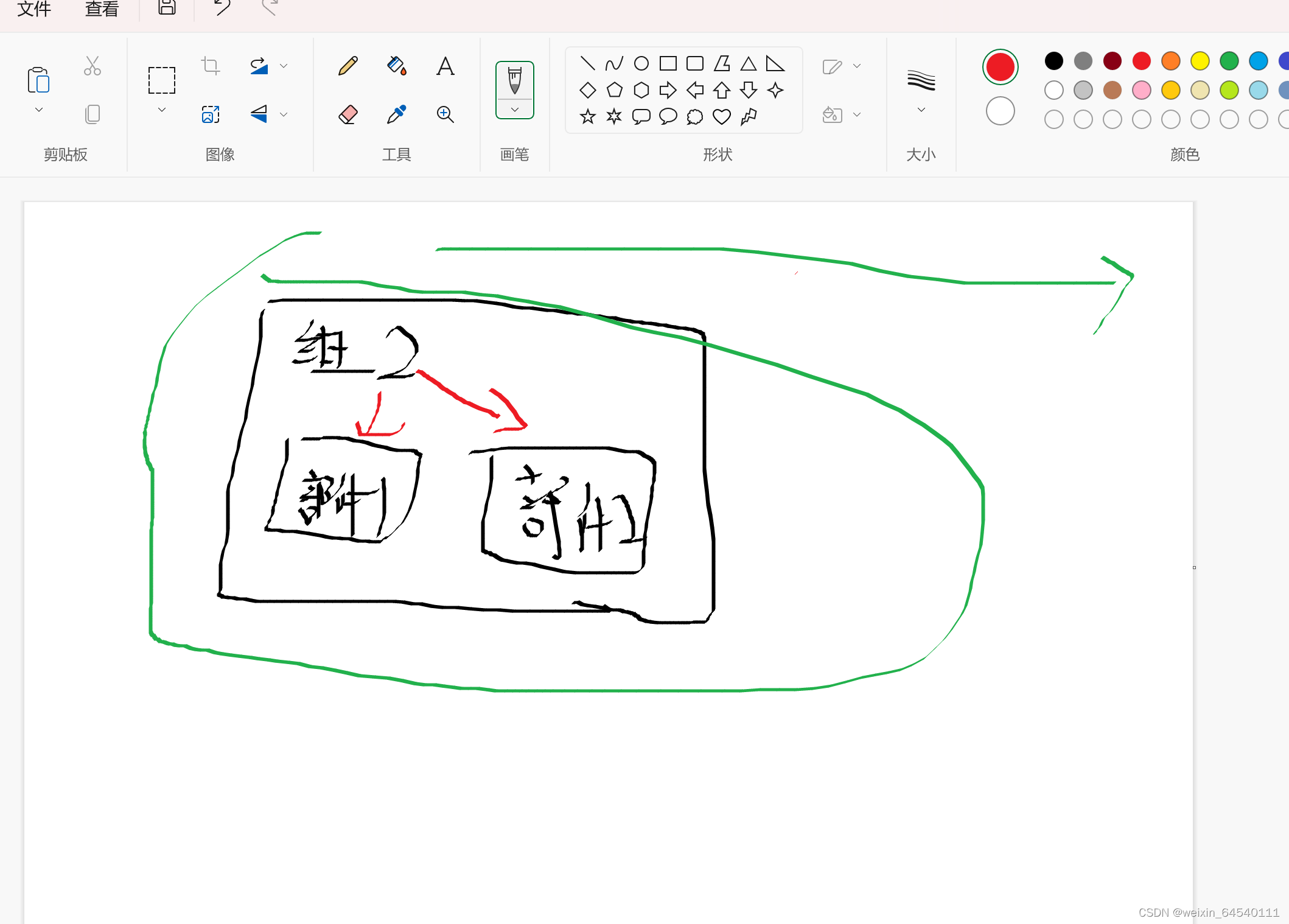
父对象就相当于领导,父对象运动的时候子对象都跟着一起运动,而子对象运动的时候,父对象里面的其他子对象不运动

















 3015
3015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









