






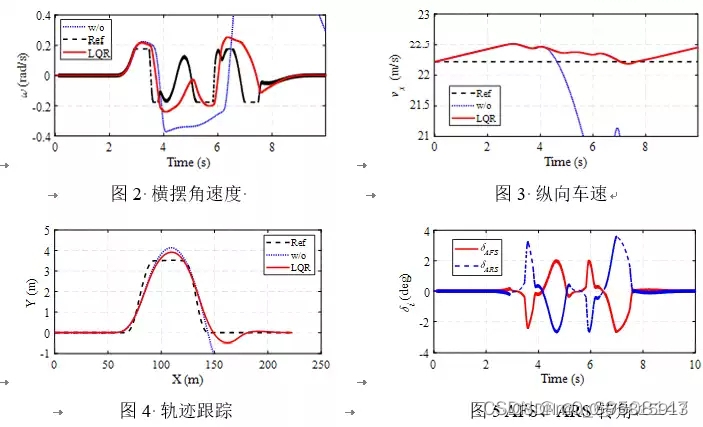
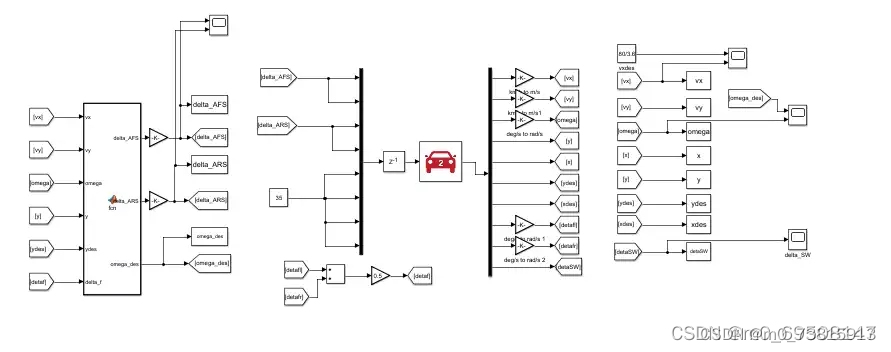
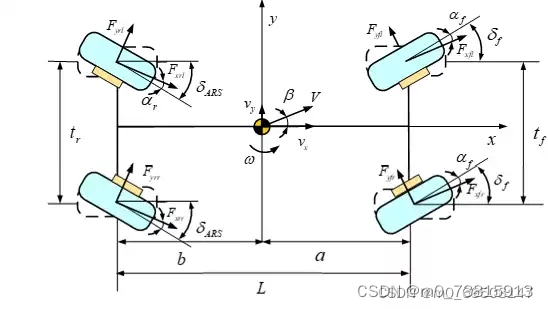
线控转向 四轮转向控制 4WIS CarSim与Simulink联合
线控转向 四轮转向控制 4WIS CarSim与Simulink联合
✔控制器为离散LQR控制器
带有完整详细的控制器、二自由度稳定性控制目标推导说明
MATLAB版本为2018b CarSim版本为2018兼容2019
YID:2330

线控转向 四轮转向控制 4WIS CarSim与Simulink联合
线控转向 四轮转向控制 4WIS CarSim与Simulink联合
✔控制器为离散LQR控制器
带有完整详细的控制器、二自由度稳定性控制目标推导说明
MATLAB版本为2018b CarSim版本为2018兼容2019
YID:2330
 6531
1002
611
6531
1002
611











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























