







carsim转向扭矩控制-开环控制设置
在carsim和matlab联合仿真开发过程中,如果涉及到车辆横向控制的功能,一般我们会通过控制车轮转角或者控制转向扭矩的方式进行。
一 通过车轮转角控制
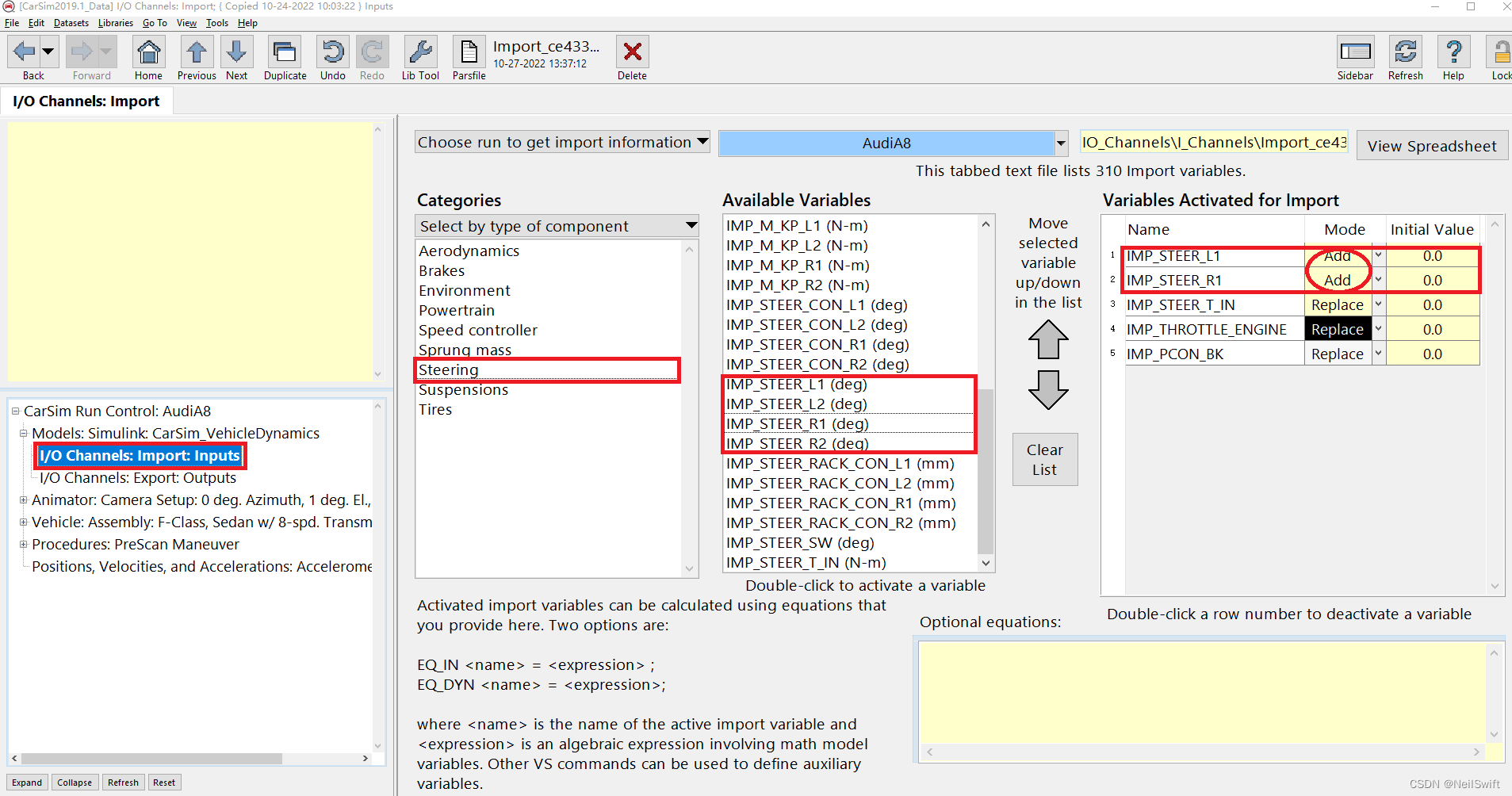
通过查看carsim输入信号列表的说明,找到车轮转角控制的这几个信号,对于前轮转向的车辆,我们只需要设置L1和R1即可。

在carsim软件中的车辆输入信号列表中加入IMP_STEER_L1和IMP_STEER_R1这两个信号。添加完成后,点击页面上部的Home回到主界面,然后点击“Send to Simulink”,将模型发送到Simulink中。
在simulink中将carsim车轮转角控制的信号和其他carsim控制需要的信号组成bus总线连接到carsim的输入接口上,运行即可通过carsim看到转向控制的动画效果。
二 转向扭矩控制
当我们需要通过转向扭矩控制车辆转向时,通过在信号说明列表中找到扭矩输入信号IMP_STEER_T_IN,查看对应说明,确实是转向输入扭矩,但是当我们按照转角控制的方式设置后,给出转向扭矩信号,车辆并没有出现预期的动作。再次查看信号列表中的说明,注意括号中的内容"applies to open loop torque control only",也就是说需要将转向设置为开环扭矩控制。

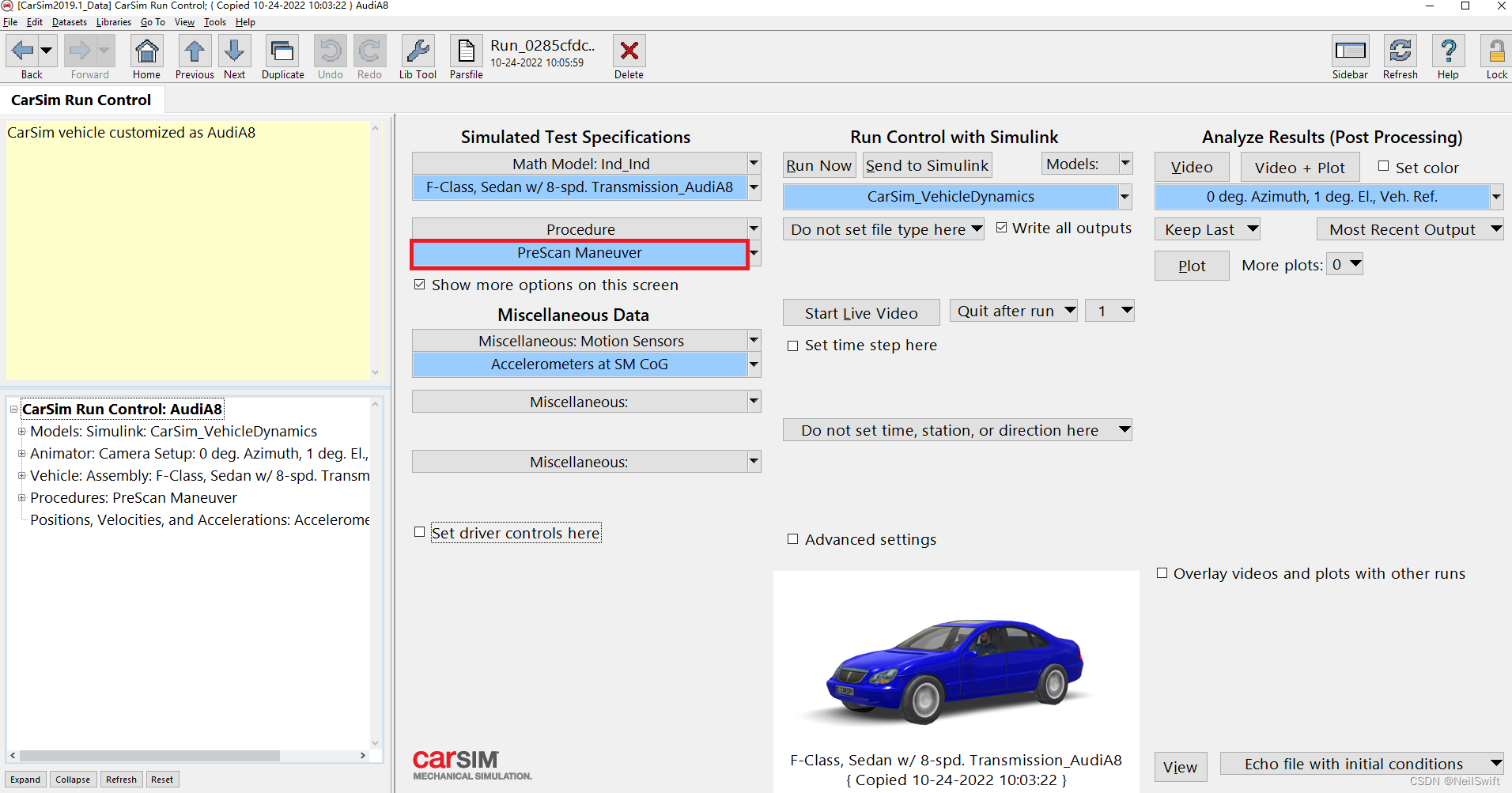
在主页面中点击“Procedure“下的蓝框处,进入到车辆参数设置中。
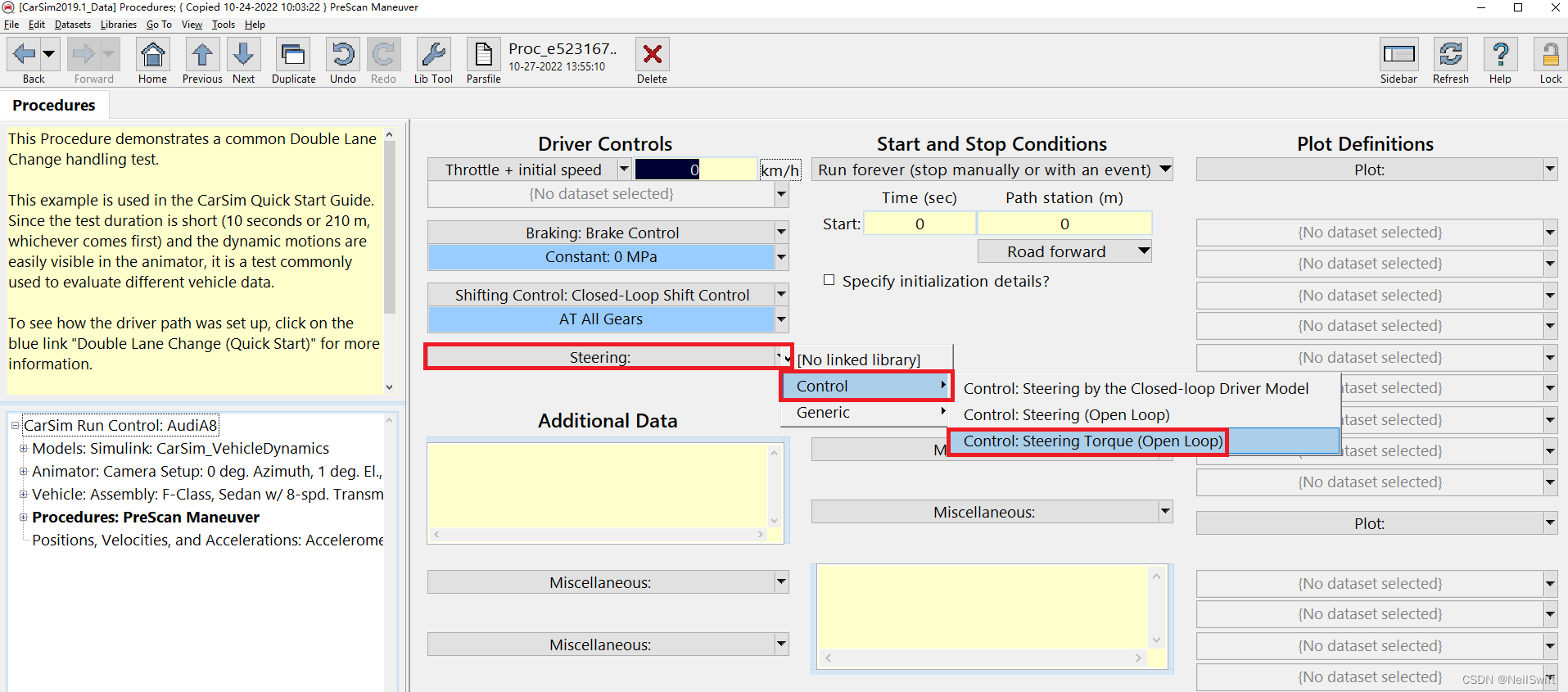
在转向系统”Steering“设置下选择”Control“->”control:steering torque(open loop)“
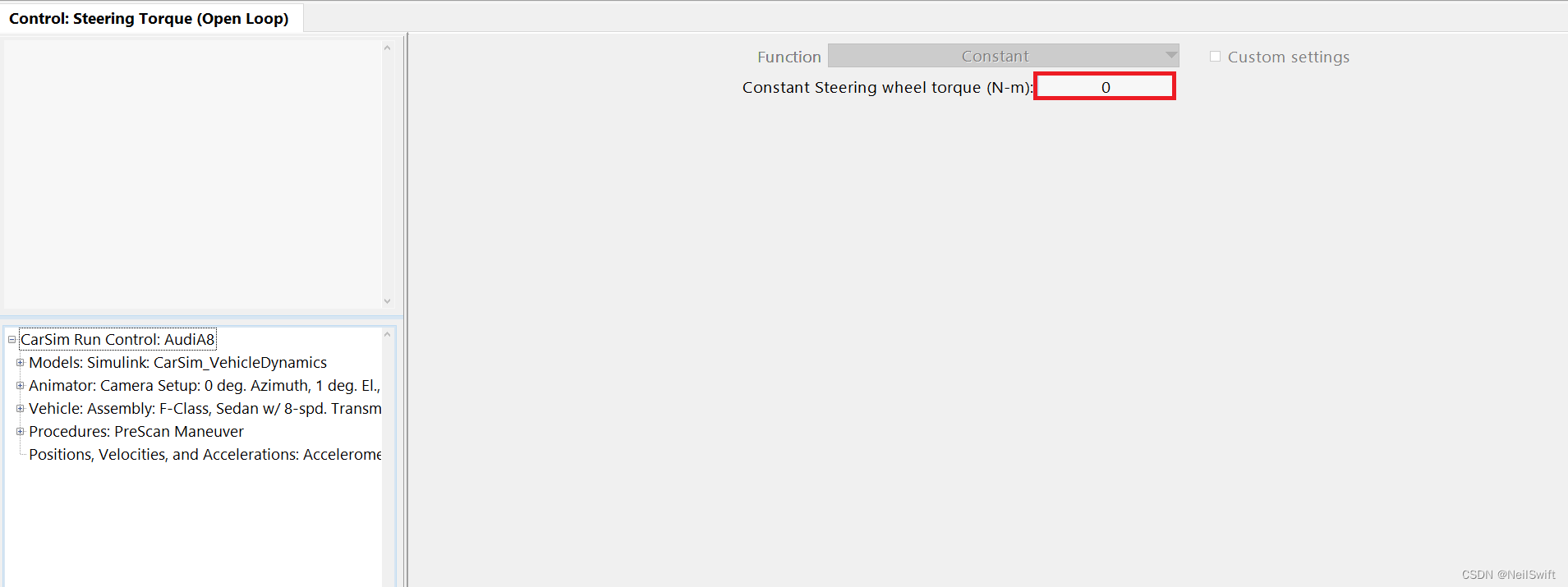
选择”control:steering torque(open loop)“后,”steer“字样会变成”open loop steering torque“,在下方的下拉三角中选择”Zero torque“,
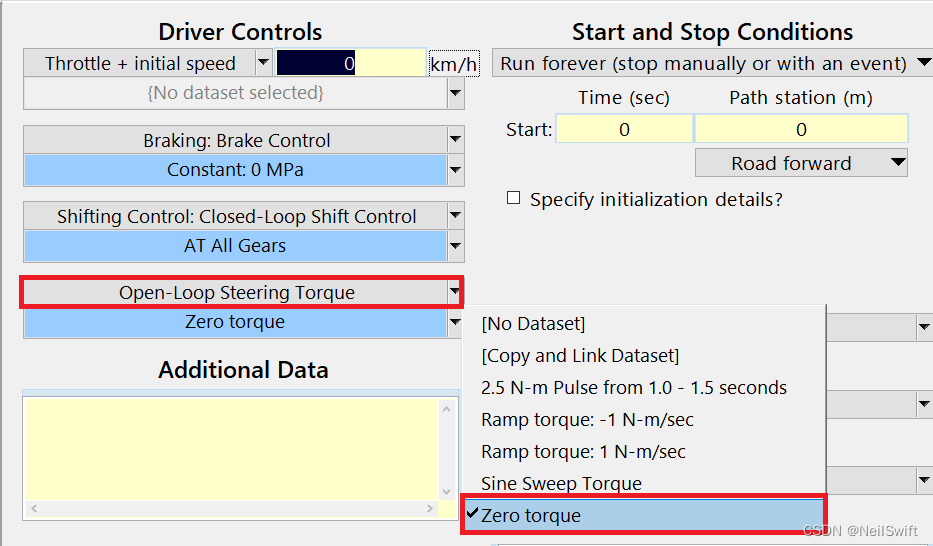
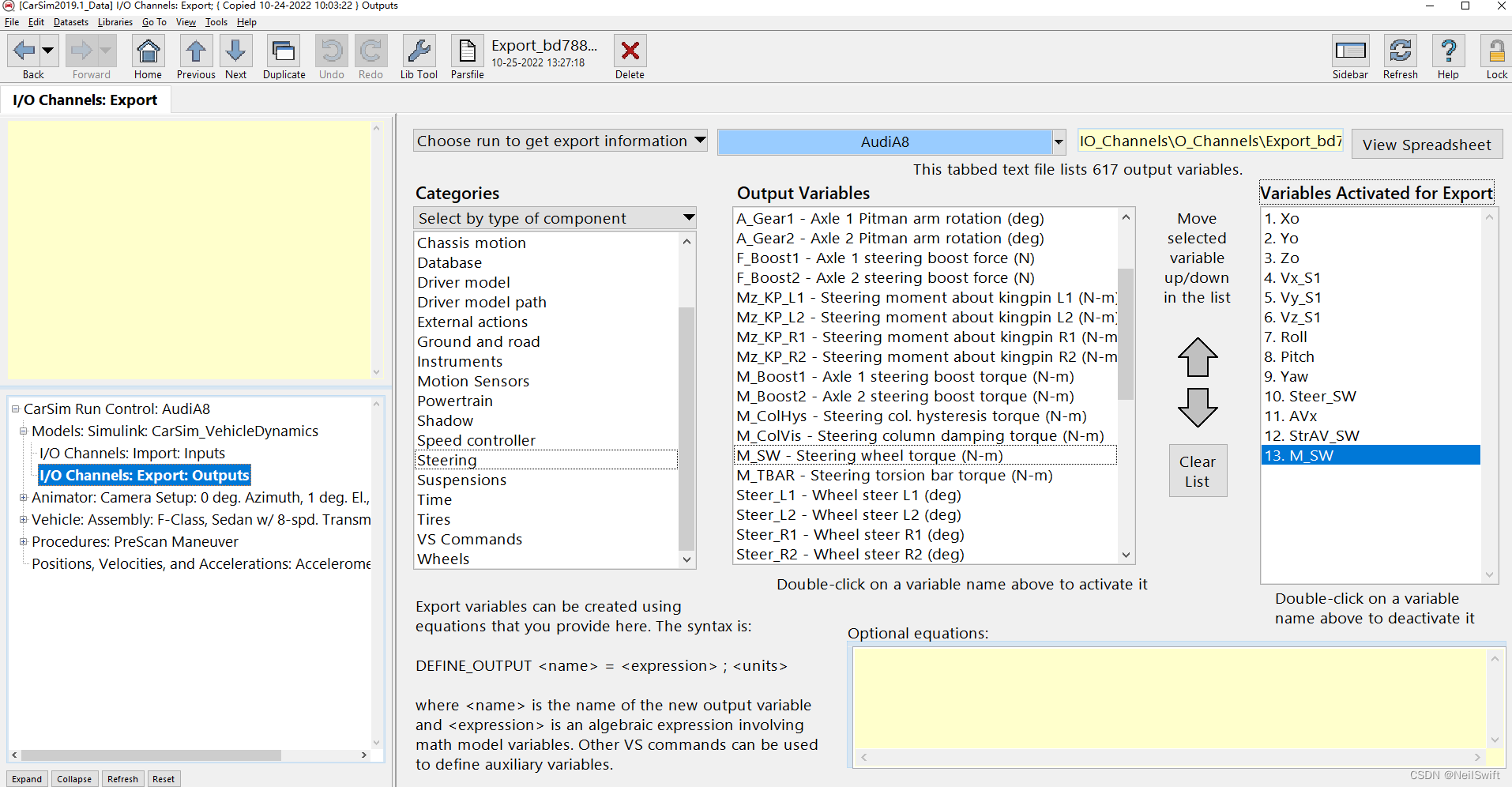
点击蓝色的”Zero torque“,将常量转向扭矩设置为0。设置完成后,回到主界面,将模型发送到simulin中,此时即可通过simulink中的扭矩信号控制车辆转向。也可以通过在carsim输出信号中设置M_SW,在simulin中实时查看carsim输出的车辆实时控制反馈扭矩信号。
















 1542
1542











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











