






链接:https://pan.baidu.com/s/1g3Vp1Ln-lEALC4PElqVcnA?pwd=1204
提取码:1204
包含两个文件:分别为虚拟软件以及ubuntu 18.04(包含ros)的虚拟机系统
一安装虚拟机VMware17.0exe

1,双击下载虚拟机
2,一路下一步,在安装完成时候需要输入许可证,使用激活码
激活码如下(输入一个即可):
JU090-6039P-08409-8J0QH-2YR7F
ZF3R0-FHED2-M80TY-8QYGC-NPKYF
FC7D0-D1YDL-M8DXZ-CYPZE-P2AY6
ZC3TK-63GE6-481JY-WWW5T-Z7ATA
1Z0G9-67285-FZG78-ZL3Q2-234JG
二加载ubnutu18.04
1虚拟机系统压缩包如图

将压缩包解压至你想要的磁盘(磁盘至少40G以上)
2打开虚拟机软件VMware17.0,如图:

点击打开虚拟机,找到下载好的虚拟机系统所在文件,就是解压的ubuntu元宝文件,如图所示

选择上图中的标记的“Ubuntuvmx.vmx”文件,点击打开。正常打开如图所示:

点击上图中的“开启此虚拟机”
如果遇到图下所示:点击“我已复制该虚拟机”
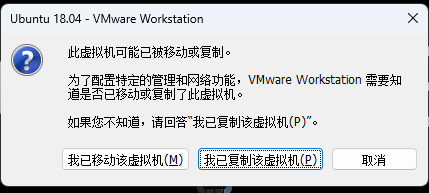
点击后,正常如图下所示:

点击图中的"bobac3" 输入密码root 进入系统如下图所示:

到此ROS系统就安装完成了,可以开始机器人的学习了

















 1430
1430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









