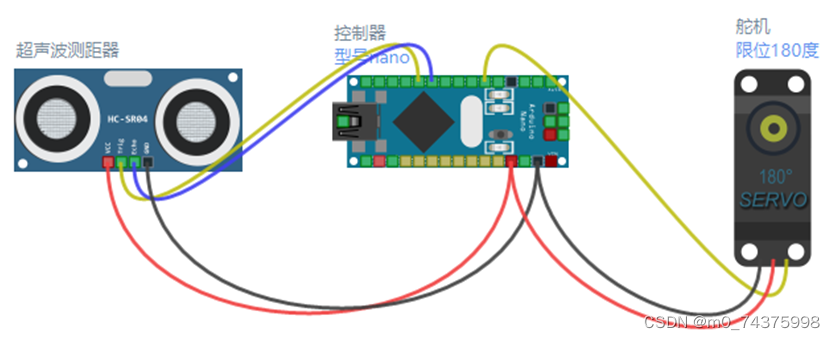
项目目标: 当人靠近时,招财猫摆动手臂,当附近没人时,招财猫静止。 准备材料: 1.arduino主控板 2.SG90舵机1个 3.超声波传感器1个 电路搭建: 超声波传感器 : Trig:输入引脚 Echo:输出引脚 常用的超声波传感器由压电晶片组成,既可以发射超声波,也可以接收超声波。小功率超声探头多作探测作用。它有许多不同的结构,可分直探头(纵波)、斜探头(横波)、表面波探头(表面波)、兰姆波探头(兰姆波)、双探头(一个探头发射、一个探头接收)等。 超声波传感器主要由如下四个部分构成:


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 该项目利用Arduino主控板结合SG90舵机和超声波传感器,实现人靠近时招财猫摆动手臂、无人时静止的功能。超声波传感器通过发送和接收超声波判断距离,舵机根据信号调整角度。电路中,超声波传感器的Trig和Echo引脚分别连接到Arduino的输入和输出,舵机的PWM信号线连接到数字接口。程序编写完成后,当检测到人靠近,舵机驱动招财猫摆动,远离则停止。
该项目利用Arduino主控板结合SG90舵机和超声波传感器,实现人靠近时招财猫摆动手臂、无人时静止的功能。超声波传感器通过发送和接收超声波判断距离,舵机根据信号调整角度。电路中,超声波传感器的Trig和Echo引脚分别连接到Arduino的输入和输出,舵机的PWM信号线连接到数字接口。程序编写完成后,当检测到人靠近,舵机驱动招财猫摆动,远离则停止。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1036
1036





