







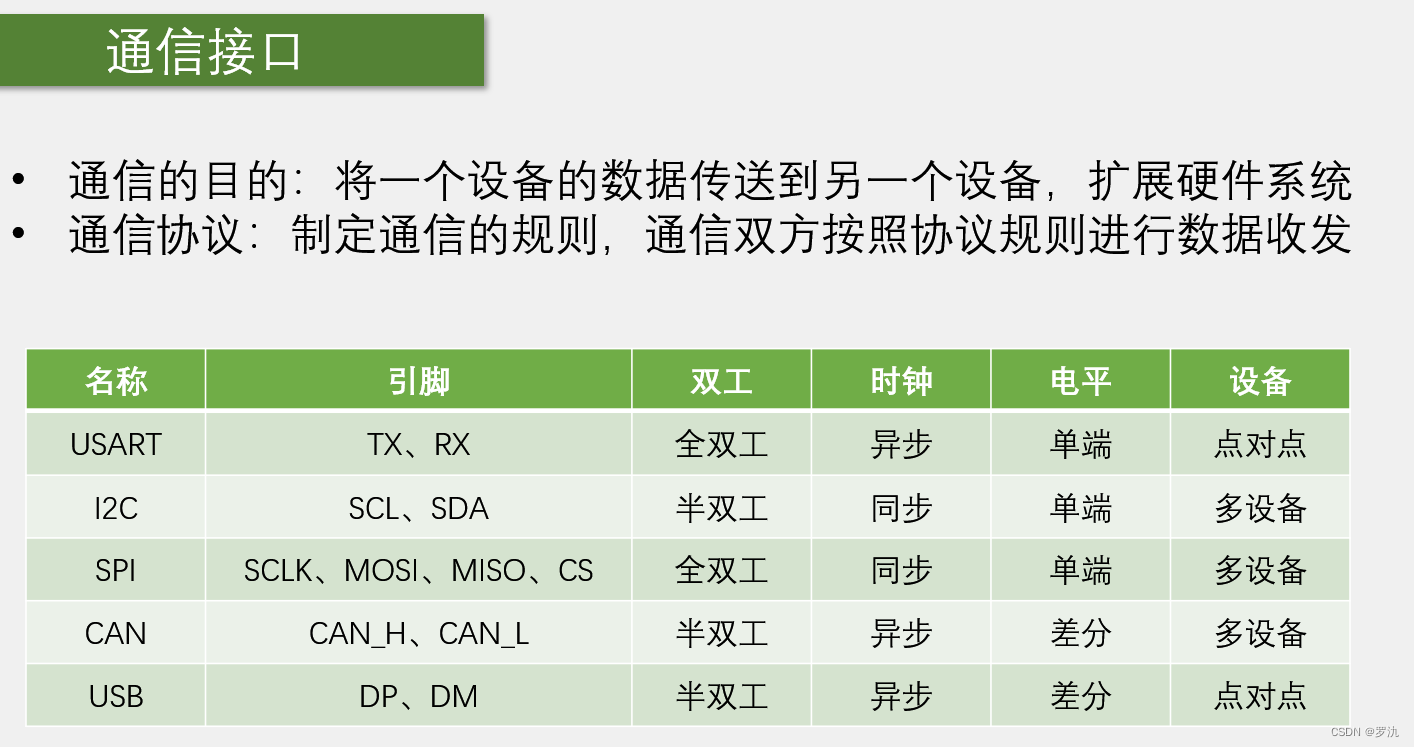
TX(Transmit Exchange)是数据发送脚,RX(Recieve Exchange)是数据接收脚,也可以叫TXD、RXD
SCL(Serial Clock)是时钟,SDA(Serial Data)是数据
MOSI(Master Output Slave Input)是主机输出数据脚,MISO(Master Input Slave Output)是主机输入数据脚,CS(Chip Select)是片选,用于指定通信的对象
CAN_H、CAN_L,这两个是差分数据脚,用两个引脚表示一个差分数据
DP(Data Positive)、DM(Data Minus)也可以叫D+、D-,也是一对差分数据脚
全双工,就是指通信双方能够同时进行双向通信,一般来说全双工的通信都有两根通信线,发送线路和接收线路互不影响
CAN 和 USB 两根差分线也是组合成为一根数据线的,是半双工
还有单工,是指数据只能从一个设备到另一个设备,而不能反着来,比如把串口的 RX 引脚去掉,串口就变成单工了
I2C 和 SPI 有单独的时钟线,所以它们是同步的,接收方可以在时钟信号的指引下进行采样
异步需要双方约定好采样频率,并且还需要加一些帧头帧尾,进行采样位置的对齐
单端信号,引脚的高低电平是对 GND 的电压差,所以单端信号的双方必须要共地,把 GND 接在一起
差分信号,是靠两个差分引脚的电压差来传输信号的,USB 协议里也有需要一些地方需要单端信号,所以 USB 还是需要共地的。使用差分信号可以极大地提高抗干扰特性,所以差分信号的传输速度和距离都会非常高,性能很不错
设备特性,多设备是可以挂载多个设备的,有寻址过程以确定通信对象,点对点则是双方直接传输

I2C 和 SPI 这些,一般都是芯片之间的通信,不会接在电脑上
USB 转串口上有个芯片,型号是 CH340,这个芯片可以把串口协议转换为 USB 协议
中间是陀螺仪传感器的模块,可以测量角速度、加速度这些姿态参数,一边是串口的引脚,另一边是 I2C 的引脚
右边是蓝牙串口模块,下面四个脚是串口通信的引脚,上面的芯片可以和手机互联,实现手机遥控单片机的功能
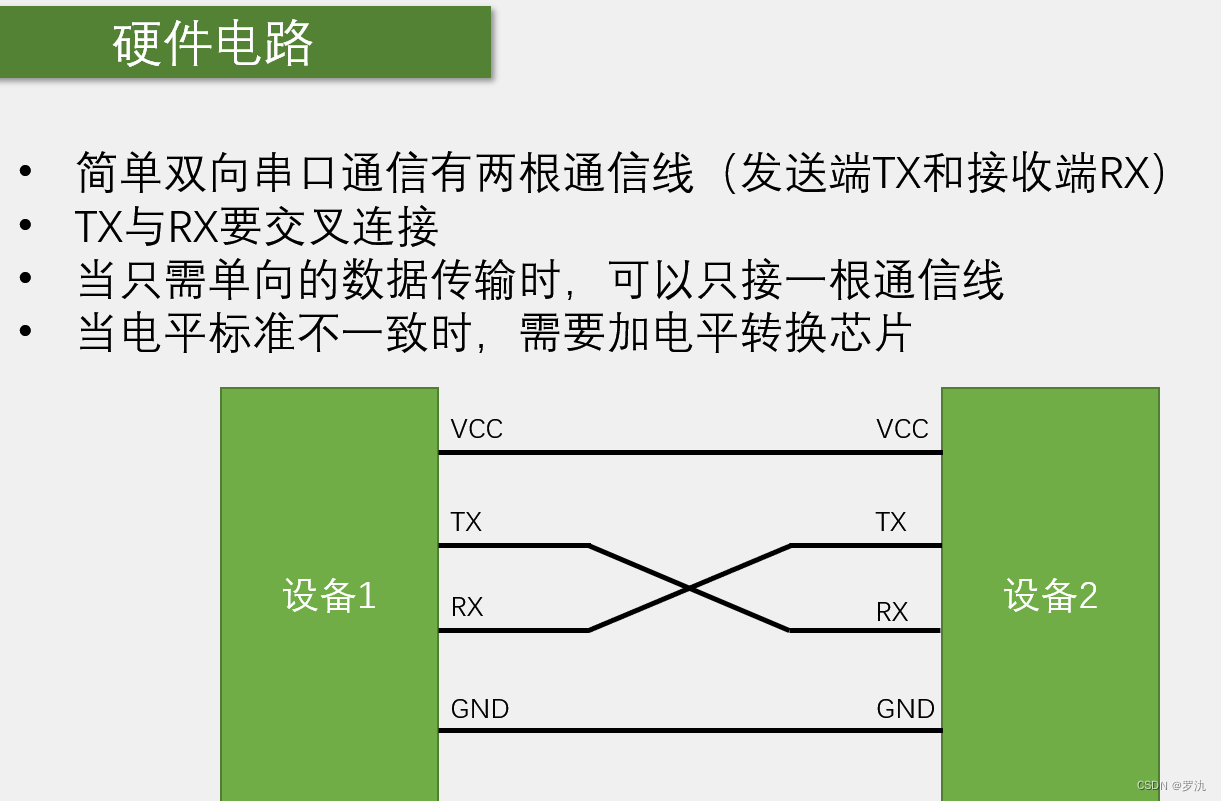
复杂一点的串口还有其他引脚,比如时钟引脚、硬件流控制的引脚
串口有很多电平标准,像这种直接从控制器里出来的信号一般都是 TTL 电平,相同的电平才能互相通信
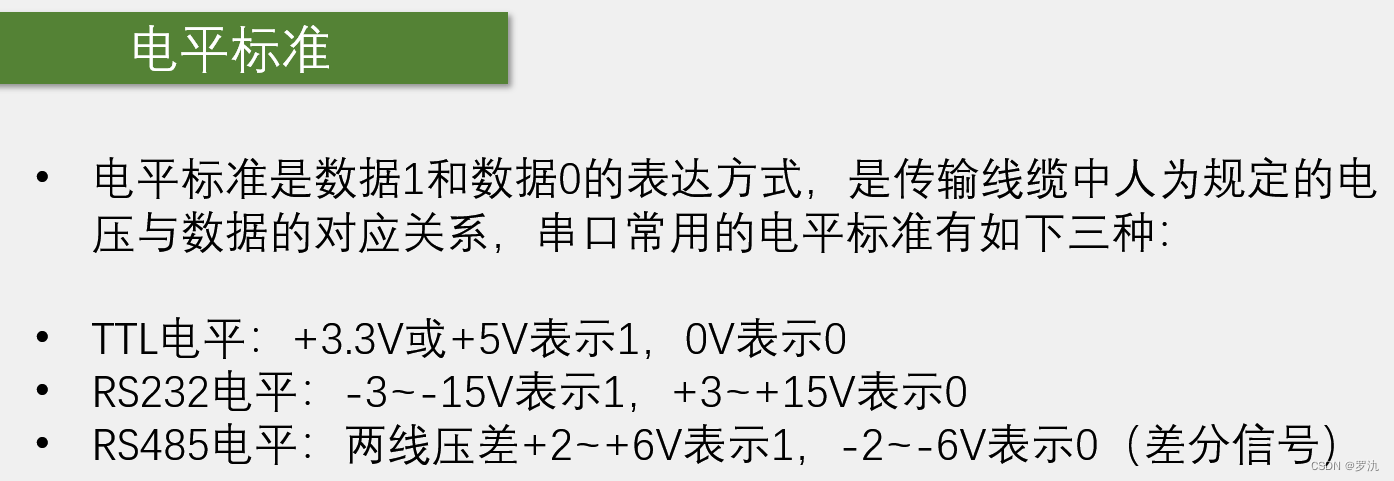
RS232 电平一般在大型的机器上使用,由于环境比较恶劣,静电干扰比较大,使用这里电平的电压比较大,而且允许波动的范围也很大
RS485 电平作为差分信号,抗干扰能力强,通信距离可以达上千米,而上面两种电平最远只能到达几十米,再远就传不了
单片机这种低压小型设备,使用的都是 TTL 电平,之后的内容也是基于 TTL 电平,如果设备需要其他电平,那再加电平转换芯片。在软件层面,它们都属于串口,程序并不会有什么变化
以上是硬件部分
下面是软件部分
如何用 1 和 0,来组成我们想要发送的一个字节数据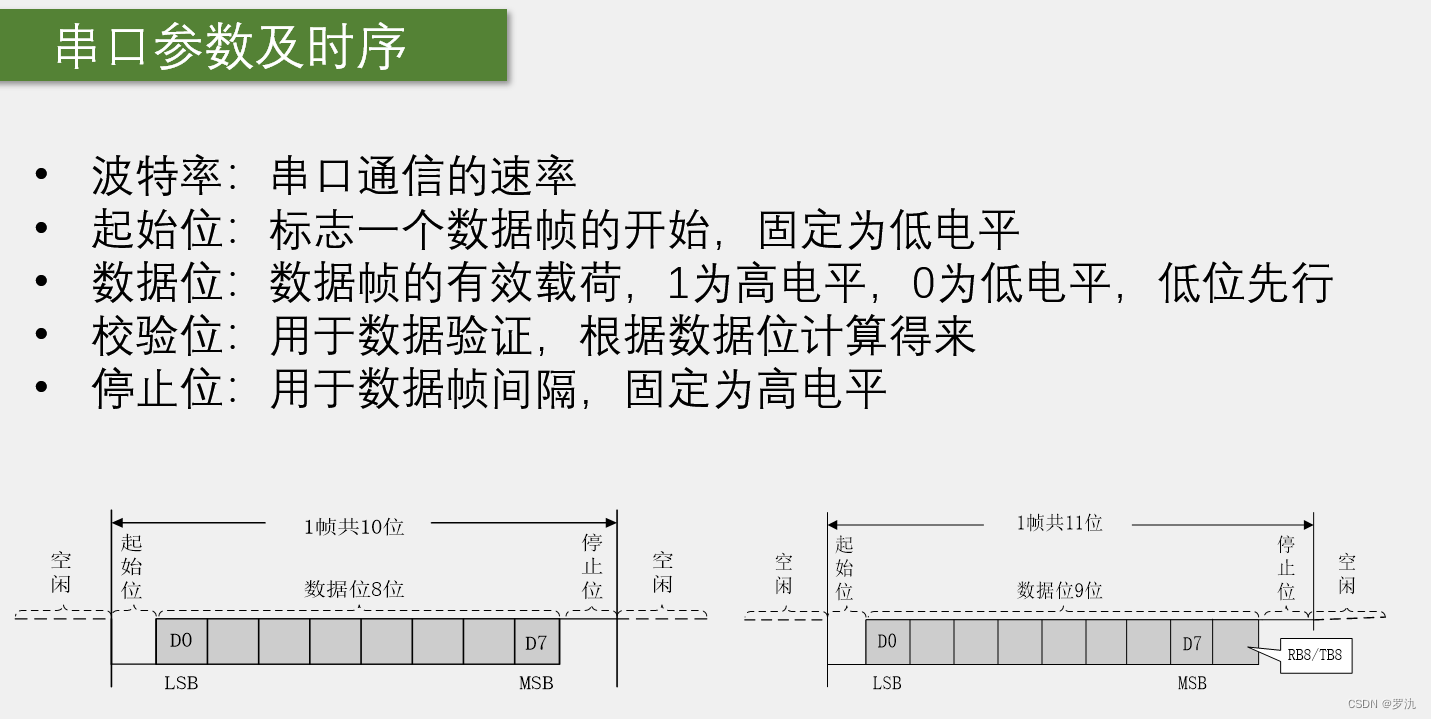
下面两个是时序图,这是串口发送一个字节的格式,这个格式是串口协议规定的
串口中,每一个字节都装载在一个数据帧里面,每个数据帧都由起始位、数据位和停止位组成
波特率本来的意思是每秒传输码元的个数,单位是码元/s,或者直接叫波特(Baud),还有个速率表示是比特率,意思是每秒传输的比特数,单位是 bit/s,或者加 bps,在二进制调制的情况下,一个码元就是一个 bit,此时波特率就等于比特率,单片机的串口通信,基本上都是二进制调制,也就是高电平代表 1,低电平代表 0,一位就是 1 bit
奇校验,最后一位补一个 0 或者 1,确保最后发送出的 1 的个数是奇数,偶校验同理,奇偶校验只能保证一定程度上的数据校验,要有更高的检出率,可以了解一下 CRC 校验
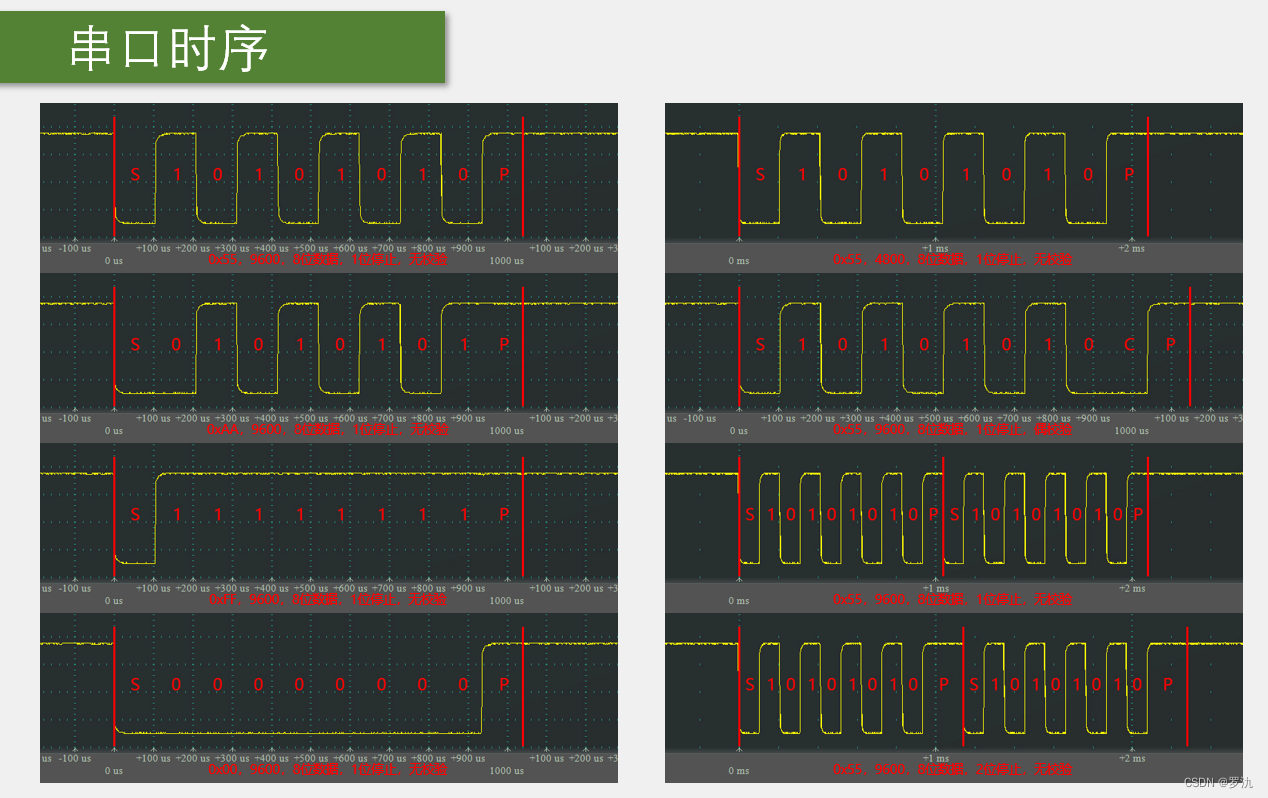
这些波形是由示波器实测的,把探头的 GND 接在负极,探头接在发送设备的 TX 引脚
波特率是 9600,所以每一位的时间就是 1/9600,大概是 104us
总结下来就是,TX 引脚输出定时翻转的高低电平,RX 引脚定时读取引脚的高低电平,每个字节的数据加上起始位、停止位、可选的校验位打包为数据帧,依次输出在 TX 引脚,另一端 RX 引脚依次接收,这样就完成了字节传递,这就是串口通信















 3245
3245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









