







1 前言
首先来看看一些基本的概念:
- 串行通信: 这指的是在通信线路上一次只能传输一个位(或字节)的数据。每个位依次传输,因此通信是按顺序进行的。这可以用于较简单的系统或长距离通信,但可能导致较低的传输速度。
- 并行通信: 这指的是在通信线路上同时传输多个位(或字节)的数据。并行通信通常可以提高传输速度,但需要更多的物理线路,并且对于较长的距离可能存在一些问题。
- 同步通信: 这要求通信的发送和接收方在某个时间基准上保持一致。数据传输的时序是协调的,通常需要等待响应或在特定时刻发送数据。这可以确保数据的可靠性,但可能引入一些等待时间。
- 异步通信: 这表示发送和接收方不需要保持一致的时钟。数据可以根据需要发送,而不必等待对方的即时响应。异步通信通常更加灵活,但可能需要处理潜在的延迟或数据丢失。
- 单工通信: 在单工通信中,数据只能在一个方向上流动。一方负责发送,另一方负责接收,但二者不能同时进行通信。这类似于单行道,只允许数据在一个方向上移动。
- 半双工通信: 半双工通信允许数据在两个方向上流动,但不同方向上的数据流不能同时进行。在某一时刻,通信的一方是发送方,另一方是接收方。这类似于对讲机,其中只有一个方向的通信能够发生。
- 全双工通信: 全双工通信允许数据在两个方向上同时进行。两个通信方均可同时发送和接收数据,实现了双向通信。典型的例子是电话通信,其中通话双方都可以同时说话和听对方说话。
关系:
- 串行、并行通信可以是同步的或异步的,这取决于数据传输的时序和通信协议。
- 在某些情况下,串行通信更容易实现同步,而并行通信可能更容易实现异步,但这并不是绝对的规则。
- 串行、并行通信可能是单工、半双工或全双工的,具体取决于通信协议和硬件实现。
- 同步通信要求通信方在时间上保持一致,而异步通信允许通信方在时间上不保持一致。
- 通信中的同步和异步概念与通信方向的单工、半双工和全双工之间并没有直接关联,而是描述了数据的时序关系。
在实际应用中,这些概念可能会相互组合,例如串行半双工通信、并行全双工通信等,以满足特定的通信需求。
2 通信协议
① UART
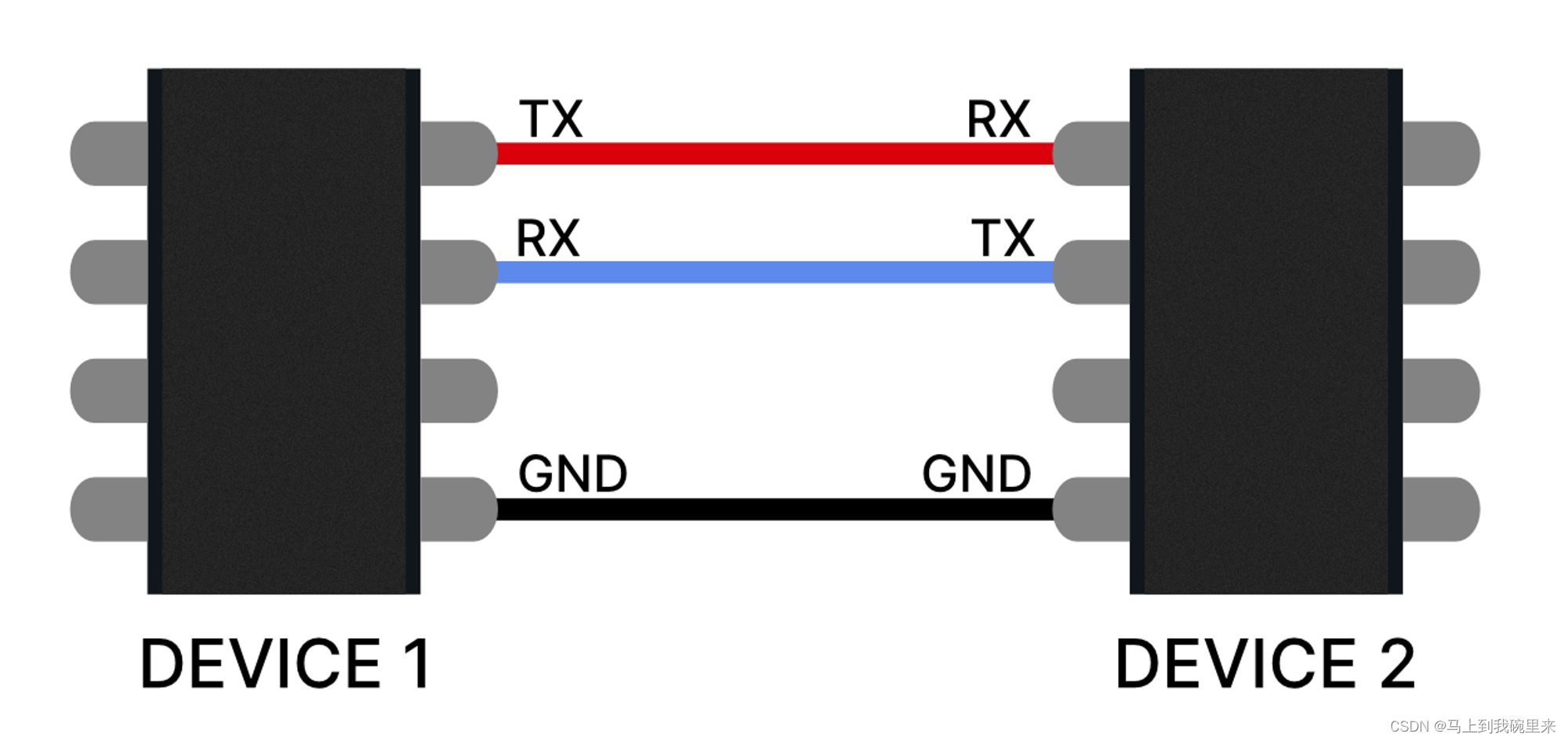
UART(Universal Asynchronous Receiver/Transmitter)是一种串行通信协议,用于在计算机系统、嵌入式系统和外部设备之间传输数据。UART是一种异步通信协议,意味着数据传输不需要在发送和接收端保持精确的时钟同步。以下是UART协议的主要特点和工作原理:
- 异步通信:
- UART使用异步通信,因此发送端和接收端不需要共享相同的时钟信号。相反,每个字节的开始和结束由特殊的起始位和停止位标志,这样接收端可以确定何时开始和结束每个字节的传输。
- 帧格式:
- 一个UART帧通常包括起始位、数据位、可选的校验位和停止位。典型的帧格式是8个数据位,一个起始位,一个或多个停止位。校验位用于增强数据的可靠性,但不是必需的。
- 波特率:
- 波特率是UART通信中非常重要的参数,表示每秒传输的比特数。通信双方必须使用相同的波特率设置,以确保正确的数据传输。常见的波特率包括9600、19200、115200等。
- 数据传输过程:
- 发送端将数据装入一个帧,包括起始位、数据位、校验位和停止位。这个帧按照设置的波特率被发送给接收端。
- 接收端根据波特率解析帧,找到起始位,并开始接收数据。根据帧格式,接收端提取数据位,并进行校验,最后检测停止位。
- 流控制:
- UART通常采用硬件流控制(RTS/CTS)或软件流控制(XON/XOFF)来管理数据流。流控制可用于防止数据溢出,确保接收端准备好接收数据。
- 用途:
- UART常用于短距离通信,例如连接微控制器、传感器、模块和外围设备。由于其简单性和可靠性,UART是许多嵌入式系统中常见的通信接口。
总体而言,UART是一种灵活、简单和广泛应用的串行通信协议,适用于许多不同类型的嵌入式和计算机系统。
② SPI
SPI(Serial Peripheral Interface)是一种同步的串行通信协议,通常用于在嵌入式系统中连接微控制器、传感器、存储器、显示器和其他外设。SPI协议具有高速传输、全双工通信和简单硬件接口等特点。以下是SPI的主要特征和工作原理:
- 总线架构:
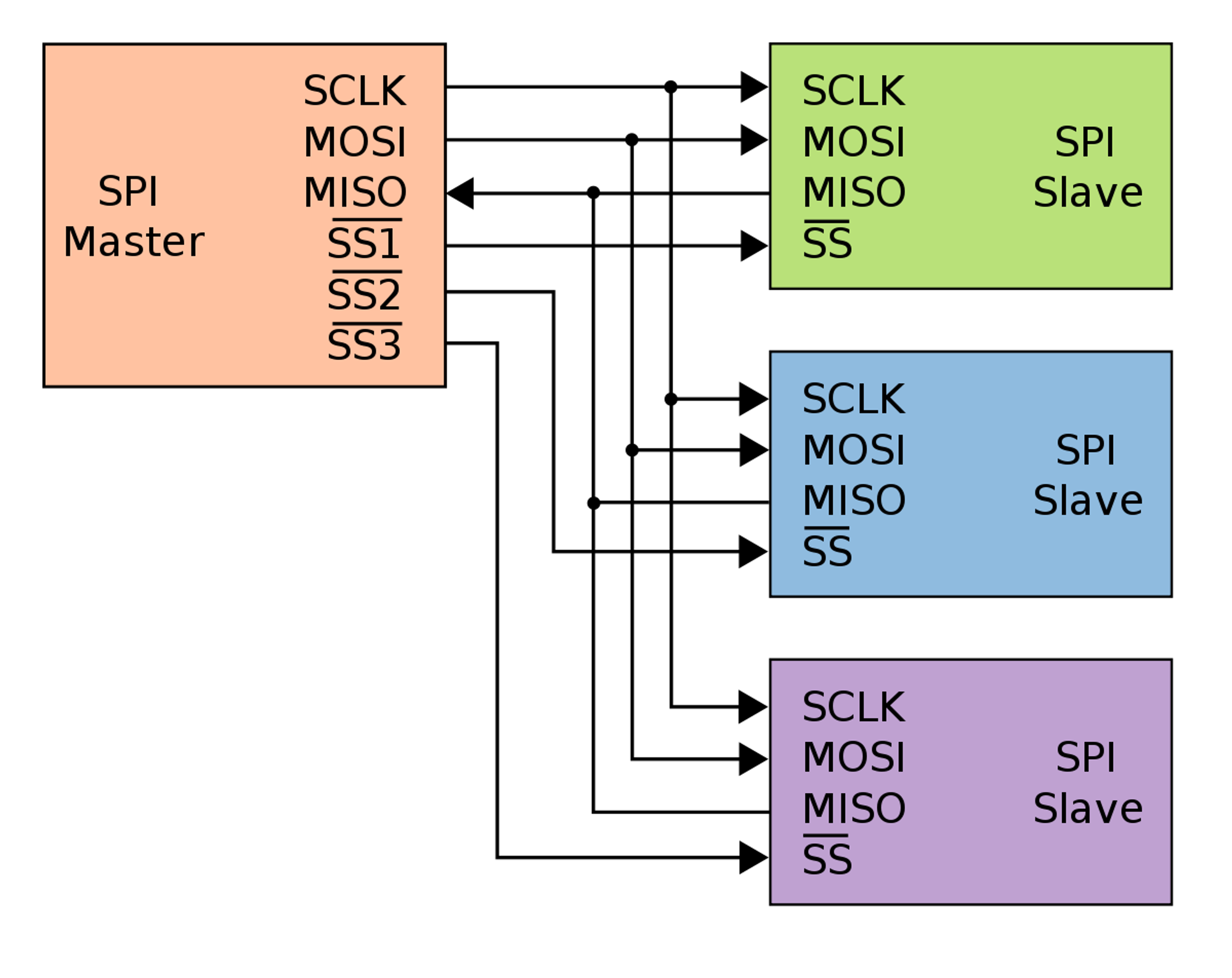
- SPI使用主从架构,其中一个设备充当主设备,其他设备充当从设备。主设备控制通信的时序和传输。通常,一个SPI总线可以连接多个从设备。
- 通信线:
- SPI使用四根主要的通信线:
- SCLK(Serial Clock): 主设备生成的时钟信号,用于同步数据传输。
- MOSI(Master Out Slave In): 主设备向从设备发送数据的输出线。
- MISO(Master In Slave Out): 从设备向主设备发送数据的输入线。
- SS/CS(Slave Select/Chip Select): 用于选择要进行通信的从设备。
- SPI使用四根主要的通信线:
- 时序:
- SPI是同步通信协议,数据的传输受到时钟信号的控制。传输时序通常由极性(CPOL)和相位(CPHA)两个参数定义,决定了数据采样的时机和极性。SPI通常支持多种模式,例如0、1、2、3四种模式。
- 全双工通信:
- SPI支持全双工通信,允许主设备和从设备同时进行数据的发送和接收。这使得SPI在高速数据传输场景中非常有用。
- 帧格式:
- SPI没有像UART那样的帧格式,数据是按字节传输的,没有起始位或停止位。通常,一个字节的数据在传输时同时包含了发送和接收的信息。
- 应用:
- SPI广泛应用于各种嵌入式系统,如传感器接口、存储器扩展、显示器驱动、通信模块等。由于其高速、简单、全双工的特性,SPI在需要大量数据传输的场景中很受欢迎。
总的来说,SPI是一种灵活且高效的串行通信协议,适用于需要快速、可靠数据传输的嵌入式系统。
③ I2C
I2C(Inter-Integrated Circuit)是一种串行通信协议,通常用于连接微控制器、传感器、存储器和其他外设。I2C是一种同步的、半双工的通信协议,允许多个设备在同一总线上进行通信。以下是I2C的主要特点和工作原理:
- 总线架构:
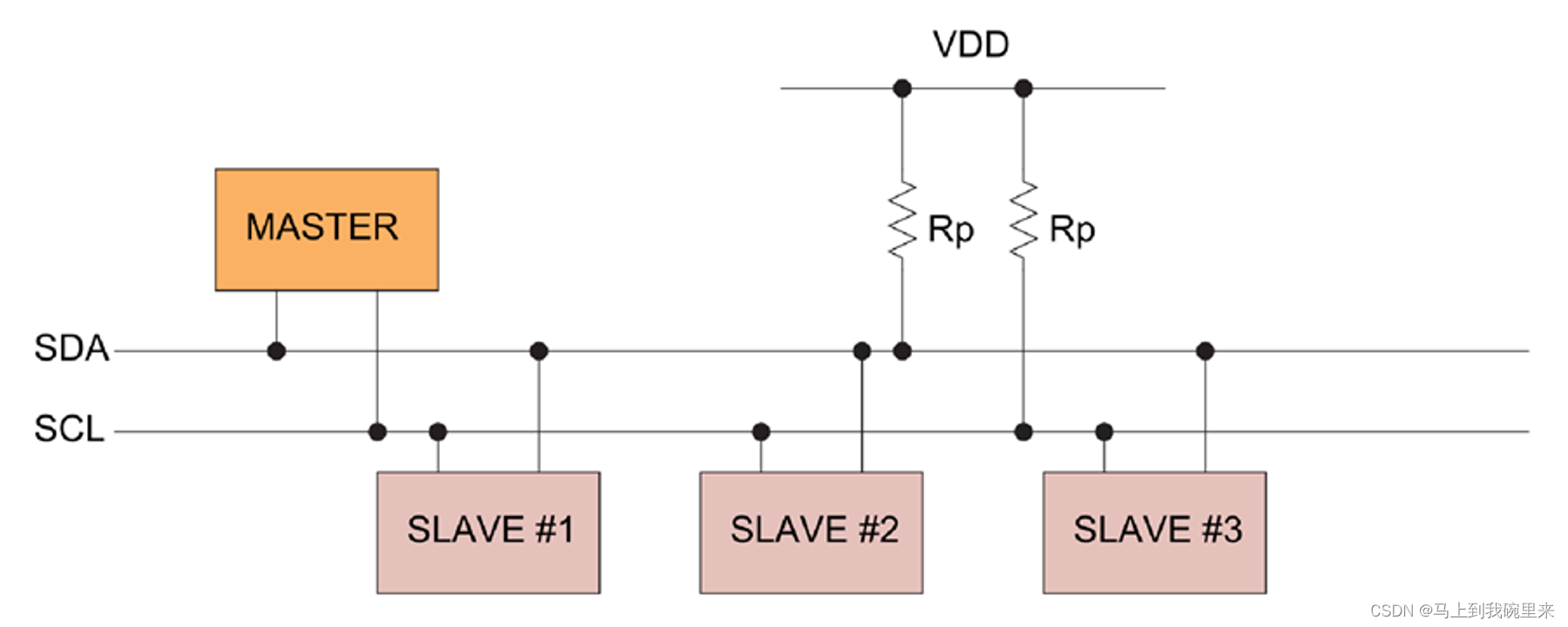
- I2C采用总线架构,其中多个设备可以连接到同一总线上。每个设备都有一个唯一的地址,用于在总线上识别和选择特定的设备。
- 通信线:
- I2C通信使用两根主要的线路:
- SDA(Serial Data Line): 用于传输数据的双向线路。
- SCL(Serial Clock Line): 用于同步数据传输的时钟线路。
- I2C通信使用两根主要的线路:
- 协议特点:
- I2C是半双工通信协议,设备可以在同一总线上进行发送和接收操作。通信始于主设备生成的起始条件,结束于主设备生成的停止条件。
- I2C支持多主机通信,允许多个主设备轮流控制总线。这使得多个微控制器可以协同工作。
- 地址帧:
- I2C通信的开始包括一个起始条件,然后是设备地址和读/写位。每个设备都有一个唯一的7位或10位地址。接收设备在地址帧后发送应答位,以指示其准备好接收数据。
- 数据传输:
- 数据传输包括8位数据字节,每个字节后面跟着一个应答位。数据可以从主设备传输到从设备,也可以从从设备传输到主设备。
- 应用:
- I2C广泛应用于连接各种外设,如传感器、存储器、显示器、实时时钟等。由于I2C总线上可以连接多个设备,它非常适用于系统中需要与多个设备进行通信的场景。
总的来说,I2C是一种灵活、简单的通信协议,适用于需要在多个设备之间进行短距离通信的嵌入式系统。
④ RS232、RS485
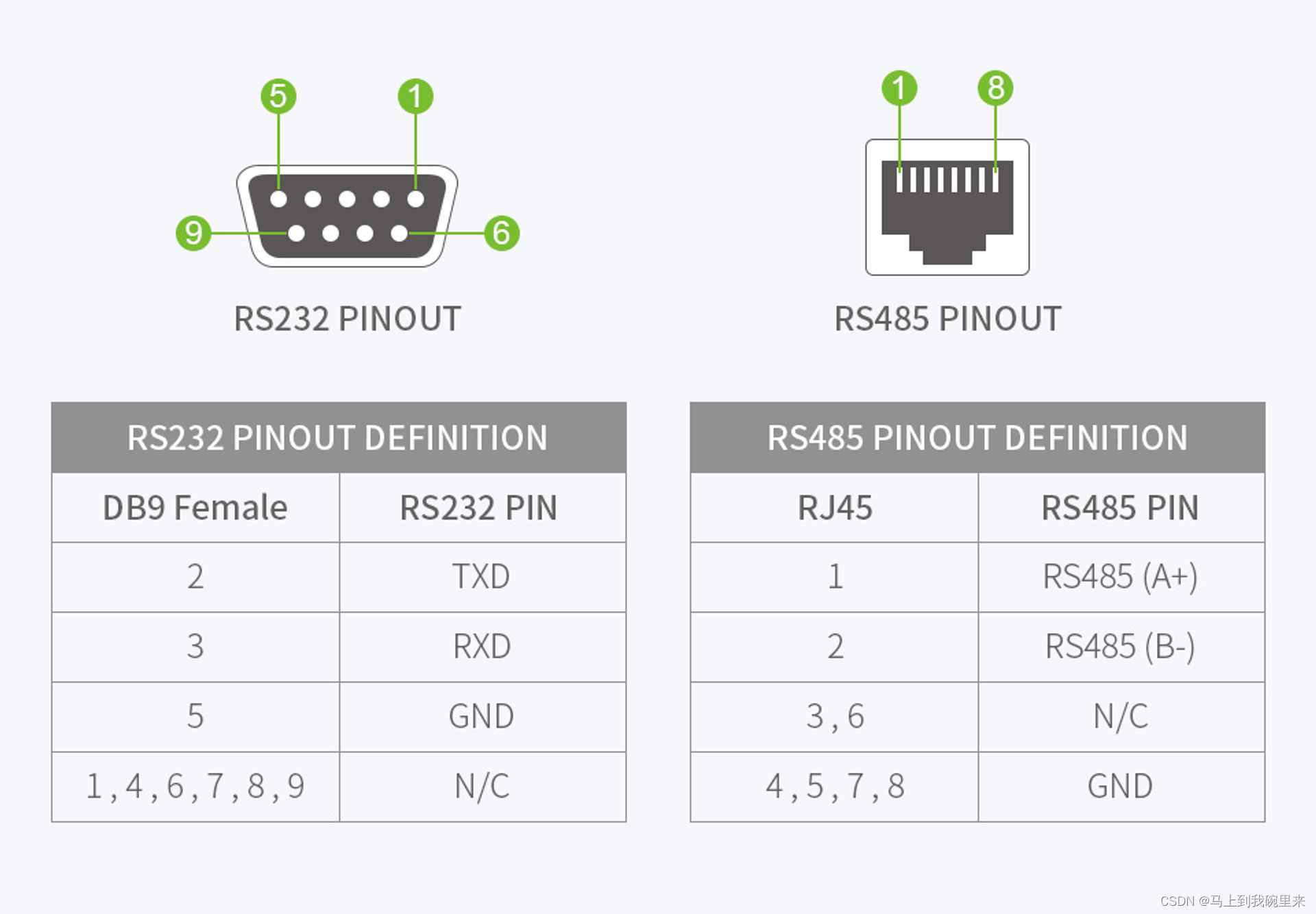
RS232(Recommended Standard 232)和RS485(Recommended Standard 485)是两种串行通信标准,通常用于在计算机系统、嵌入式系统和外部设备之间传输数据。尽管它们都是串行通信标准,但它们有一些关键的区别,适用于不同的应用场景。
RS232
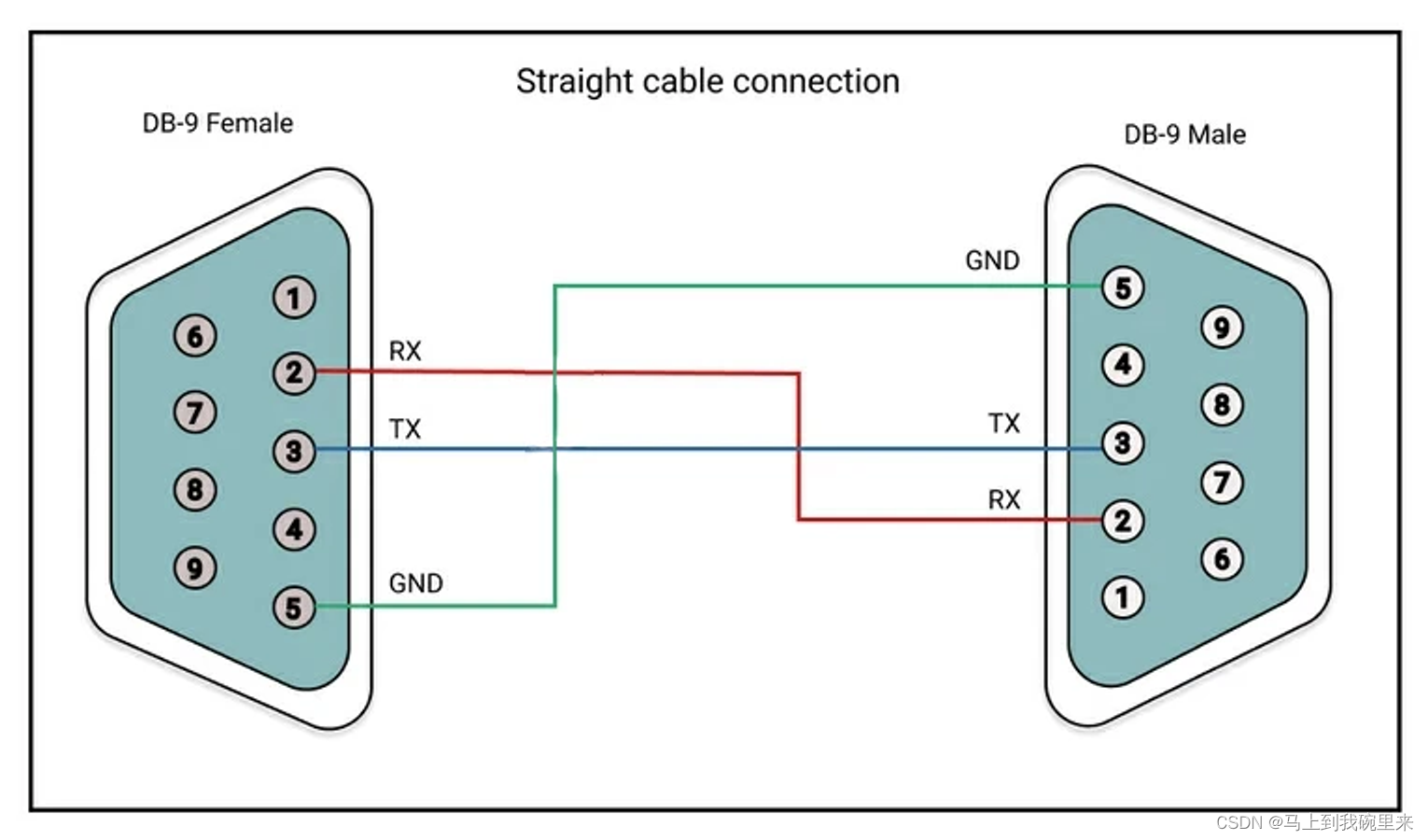
- 单点通信:
- RS232通常用于单点通信,即一对一的通信方式。一条RS232线路上只能连接两个设备,一个作为发送方,另一个作为接收方。
- 距离和速度:
- RS232适用于相对短距离的通信,一般在数米内。通信速率可以达到数十kbps或更高,但随着距离的增加,信号质量可能下降。
- 电压级别:
- RS232使用的电压级别是负逻辑,即逻辑“1”对应负电压,逻辑“0”对应正电压。
- 应用场景:
- 常见的RS232应用包括串口连接、调试连接、计算机和外部设备之间的连接,例如打印机、鼠标、调制解调器等。
RS485
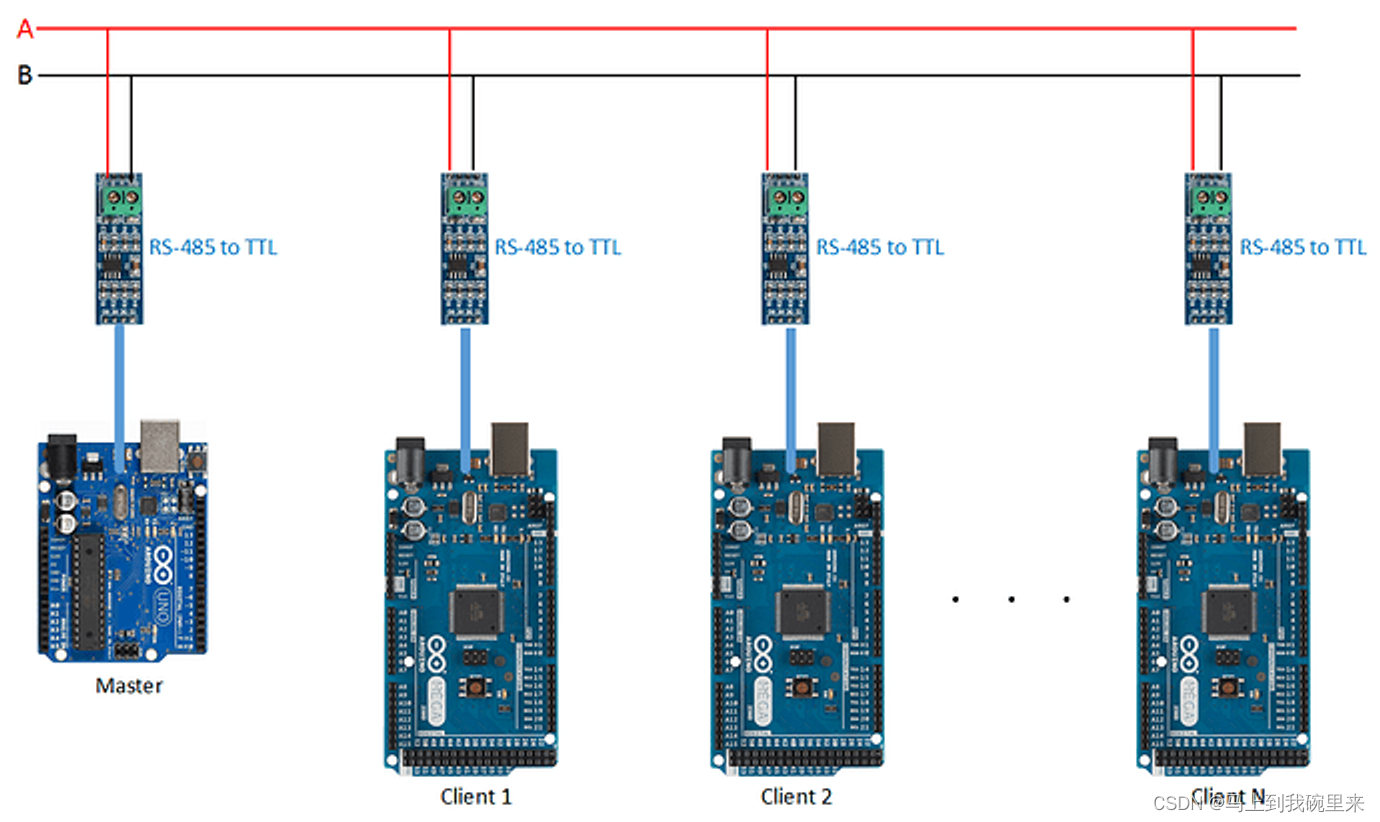
- 多点通信:
- RS485适用于多点通信,允许在同一总线上连接多个设备。每个设备都有唯一的地址,通过地址识别通信对象。
- 距离和速度:
- RS485能够支持较长距离的通信,一般可达数千米。通信速率可以从几百bps到数Mbps,具有更大的灵活性。
- 电压级别:
- RS485使用平衡电压级别,即逻辑“1”和逻辑“0”分别由两个相对电压表示,使得在长距离通信中更能抵抗电磁干扰。
- 差分信号:
- RS485使用差分信号传输,即数据线和其反向线的电压变化表示逻辑信息。这种差分传输方式使其更适合在噪声环境中稳定工作。
- 应用场景:
- RS485广泛应用于需要多设备协同工作的场景,例如工业自动化、建筑自动化、仪器仪表等。
总的来说,RS232适用于短距离、点对点的通信,而RS485适用于多点通信,特别是在长距离和噪声环境中。选择使用哪种标准通常取决于具体的应用需求。
⑤ CAN
CAN(Controller Area Network)是一种专为实时控制系统设计的串行通信协议。CAN协议最初是由德国的Bosch公司在1986年提出,后来逐渐发展成为国际标准。CAN协议主要应用于汽车领域,但也在工业控制、医疗设备和其他领域中得到广泛使用。以下是CAN协议的主要特点和工作原理:
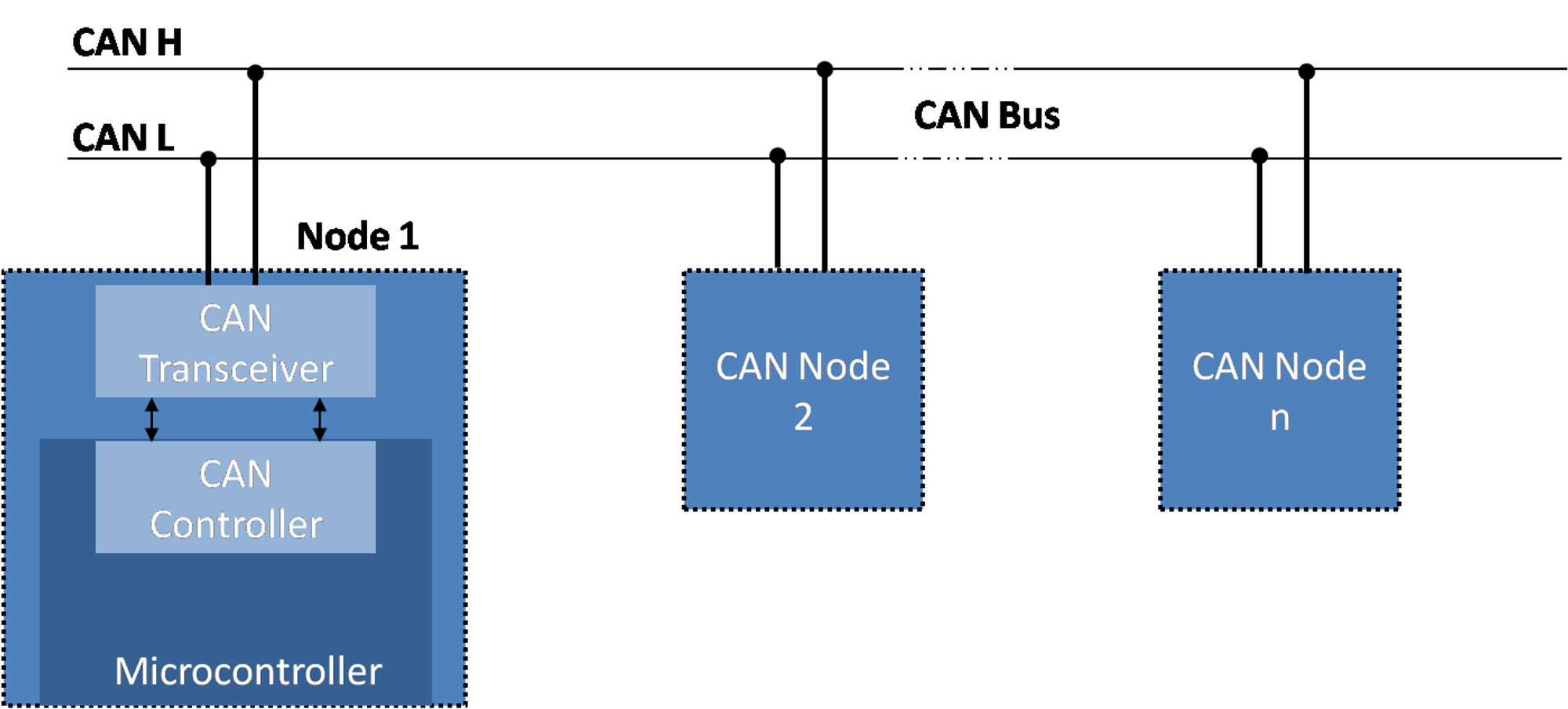
- 总线架构:
- CAN采用总线架构,允许多个节点通过共享相同的总线进行通信。每个节点都有一个唯一的标识符,用于在总线上识别发送和接收的消息。
- 通信线:
- CAN通信使用两根主要的线路:
- CAN_High: 高电平线,用于传输逻辑“0”。
- CAN_Low: 低电平线,用于传输逻辑“1”。
- CAN使用差分信号传输,能够更好地抵御电磁干扰。
- CAN通信使用两根主要的线路:
- 帧格式:
- CAN通信的基本单位是数据帧,包括标识符、控制位、数据和CRC(循环冗余校验)等字段。CAN帧分为两种类型:数据帧和远程帧。数据帧用于传输实际数据,而远程帧用于请求其他节点发送数据。
- 多主控制:
- CAN支持多主控制,允许多个节点之间动态地决定总线的控制权。这使得CAN在实时系统中更具灵活性和实时性。
- 冲突解决:
- CAN使用CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance)机制来解决冲突。节点在发送数据前会监听总线,确保总线上没有其他节点正在发送。
- 优先级和仲裁:
- 每个CAN消息的标识符包含优先级信息。在总线上发生冲突时,优先级较高的消息将胜出。这种机制称为仲裁,确保高优先级消息能够及时被发送。
- 应用场景:
- CAN协议广泛应用于汽车领域,包括车辆内部的控制系统和车辆间的通信。此外,在工业控制、医疗设备、电力系统和航空航天等领域也有广泛的应用。
总体来说,CAN是一种适用于实时控制系统的可靠、高效的通信协议,特别适用于具有多个节点和实时性要求的场景。
3 对比
UART(Universal Asynchronous Receiver Transmitter)是一种异步串行通信协议,用于在两个设备之间传输数据。它使用一根数据线(TXD)发送数据,另一根数据线(RXD)接收数据。UART通信的每个字节都包含一个起始位、8个数据位和一个停止位。
RS232(Recommended Standard 232)是一种串行通信标准,用于在计算机和其他设备之间传输数据。它使用EIA-232电压标准来定义信号电平。RS232通信可以支持点对点或多点连接。
RS485是一种半双工差分串行通信协议,用于在多台设备之间传输数据。它使用两根数据线(A线和B线)来发送和接收数据。RS485通信可以支持多达32台设备连接到同一个总线。
I2C(Inter-Integrated Circuit)是一种串行通信协议,用于在集成电路之间传输数据。它使用两根数据线(SDA和SCL)来发送和接收数据。I2C通信可以支持多达127台设备连接到同一个总线。
SPI(Serial Peripheral Interface)是一种同步串行通信协议,用于在主设备和从设备之间传输数据。它使用四根数据线(SCLK、MOSI、MISO和SS)来发送和接收数据。SPI通信可以支持多台从设备连接到同一个主设备。
以下是UART、RS232、RS485、I2C和SPI的比较表:
| 特性 | UART | RS232 | RS485 | I2C | SPI |
|---|---|---|---|---|---|
| 通信方式 | 异步串行 | 串行 | 半双工差分串行 | 同步串行 | 同步串行 |
| 数据线 | 1根(TXD/RXD) | 2根(TXD/RXD) | 2根(A线/B线) | 2根(SDA/SCL) | 4根(SCLK/MOSI/MISO/SS) |
| 连接方式 | 点对点或多点 | 点对点或多点 | 多点 | 多点 | 点对点 |
| 最大传输距离 | 15米 | 15米 | 1200米 | 10米 | 10米 |
| 最大传输速率 | 115200bps | 115200bps | 10Mbps | 400kHz | 10Mbps |
| 优点 | 简单易行 | 兼容性好 | 抗干扰能力强 | 速度快 | 速度快 |
| 缺点 | 速度慢 | 抗干扰能力弱 | 速度慢 | 地址冲突 | 复杂度高 |
应用场景:
- UART:用于连接计算机和外围设备,如键盘、鼠标、打印机等。
- RS232:用于连接计算机和工业设备,如PLC、仪表等。
- RS485:用于连接多个工业设备,如楼宇自动化、安防监控等。
- I2C:用于连接主板和外围设备,如EEPROM、传感器等。
- SPI:用于连接主板和高速外围设备,如SD卡、LCD显示屏等。
















 629
629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









