






自定义障碍物,无人驾驶基于mpc的轨迹重规划跟踪,carsim2019,similink2018,有对应程序的视频讲解
ID:4830668439147990
规控算法工程师
自定义障碍物,在无人驾驶领域中是一项重要的技术。随着无人驾驶技术的快速发展,越来越多的研究者开始关注如何在无人驾驶车辆中实现自定义障碍物的规划与跟踪。而基于模型预测控制(Model Predictive Control,MPC)的轨迹重规划跟踪方法正是在这一领域中被广泛应用的一种方法。
在这个技术分析文章中,我们将详细探讨自定义障碍物、基于MPC的轨迹重规划跟踪以及与之相关的Carsim2019和Simulink2018等工具。文章将围绕以下几个要点展开阐述。
首先,我们将介绍什么是自定义障碍物以及在无人驾驶中的作用。自定义障碍物可以是各种各样的物体,例如行人、交通标志、建筑物等。在实际驾驶场景中,这些障碍物的位置和形状对于车辆的行驶路径和安全性具有重要影响。因此,为了提高无人驾驶车辆的驾驶能力和安全性,我们需要针对不同的场景和需求来定义和设置障碍物。
接下来,我们将介绍基于MPC的轨迹重规划跟踪方法。MPC是一种优化控制方法,通过对系统模型进行多步预测,结合优化目标和约束条件,生成最优的控制策略。在无人驾驶中,基于MPC的轨迹规划与跟踪方法可以根据当前环境和障碍物位置实时调整车辆的轨迹,从而保证车辆的安全性和舒适性。
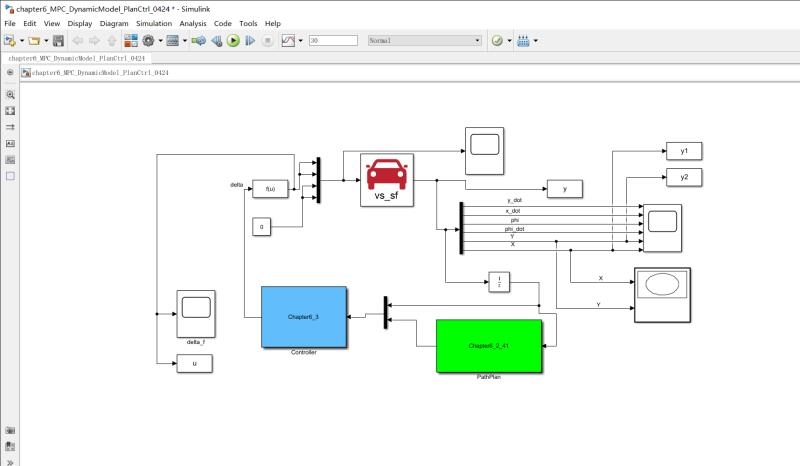
此外,我们还将介绍Carsim2019和Simulink2018等工具在自定义障碍物和MPC轨迹规划跟踪中的应用。Carsim2019是一种专业的车辆动力学仿真软件,可以模拟各种驾驶场景和车辆行为。Simulink2018是一种功能强大的工具,可以实现各种控制算法和系统建模。通过结合这些工具,我们可以进行模拟实验、优化参数并验证自定义障碍物和轨迹规划跟踪方法的有效性。
最后,我们还提供了配套的无人驾驶车辆模型预测控制资料,包括视频讲解和额外指导。如果您对自定义障碍物和MPC轨迹规划跟踪方法有兴趣,可以联系我们获取更多资料。此外,我们还可以为您提供有偿的服务,如添加障碍物或改变位置等。我们相信这些资料和服务将为您在无人驾驶领域的研究和应用提供有力支持。
总结起来,本文围绕自定义障碍物和基于MPC的轨迹重规划跟踪展开了详细的技术分析。通过介绍自定义障碍物的作用、MPC方法的原理和工具的应用,希望读者可以对无人驾驶技术中的自定义障碍物和轨迹规划跟踪有更深入的了解。同时,我们也鼓励读者与我们联系,获取更多资料和服务,从而共同推动无人驾驶技术的发展。
以上相关代码,程序地址:http://coupd.cn/668439147990.html















 377
377











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









